Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Stock BibleDocumento3 páginasStock Biblevp_choudharyAinda não há avaliações
- Application Form 2017Documento5 páginasApplication Form 2017vp_choudharyAinda não há avaliações
- HarmonicDocumento6 páginasHarmonicnet_travellers100% (2)
- Equity Derivatives Workbook (Version March-2018) PDFDocumento165 páginasEquity Derivatives Workbook (Version March-2018) PDFCA Vinay K Singh100% (1)
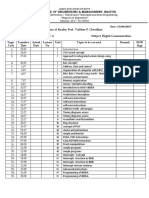
- GATE18 EC ScheduleDocumento8 páginasGATE18 EC ScheduleKumar AmitAinda não há avaliações
- Insert The Sub Title of Your PresentationDocumento6 páginasInsert The Sub Title of Your Presentationvp_choudharyAinda não há avaliações
- Gann Square of Nine - How To Trade Using This Forecasting ToolDocumento7 páginasGann Square of Nine - How To Trade Using This Forecasting Toolvp_choudharyAinda não há avaliações
- Multi RateDocumento110 páginasMulti Ratevp_choudharyAinda não há avaliações
- PCB DesigningDocumento4 páginasPCB Designingvp_choudharyAinda não há avaliações
- Multirate - Funds PDFDocumento23 páginasMultirate - Funds PDFAejaz AamerAinda não há avaliações
- OutcomeDocumento3 páginasOutcomevp_choudharyAinda não há avaliações
- Multi RateDocumento110 páginasMulti Ratevp_choudharyAinda não há avaliações
- Lab View Student WorkbookDocumento343 páginasLab View Student Workbookjzmrpa100% (1)
- LabVIEW BasicsDocumento36 páginasLabVIEW BasicsfaisalphyAinda não há avaliações
- Noise in Communication SystemsDocumento9 páginasNoise in Communication Systemsvp_choudharyAinda não há avaliações
- Intelligent Transportation Systems Around The WorldDocumento58 páginasIntelligent Transportation Systems Around The WorldmladenAinda não há avaliações
- Microprocessor 8085 Lab Manual PDFDocumento29 páginasMicroprocessor 8085 Lab Manual PDFvp_choudhary33% (3)
- 8Documento20 páginas8Amit Kumar JainAinda não há avaliações
- MPI Teaching PlanDocumento2 páginasMPI Teaching Planvp_choudharyAinda não há avaliações
- CAP 1 Cut Off PDFDocumento2.813 páginasCAP 1 Cut Off PDFvp_choudharyAinda não há avaliações
- ICQUEST 2015 Registration FormDocumento1 páginaICQUEST 2015 Registration Formvp_choudharyAinda não há avaliações
- CAP 2014 Cut Off PDFDocumento33 páginasCAP 2014 Cut Off PDFvp_choudharyAinda não há avaliações
- 4G: The What, Why and WhenDocumento7 páginas4G: The What, Why and Whenganesh madhav kendreAinda não há avaliações
- 4G: The What, Why and WhenDocumento7 páginas4G: The What, Why and Whenganesh madhav kendreAinda não há avaliações
- SyllabusDocumento3 páginasSyllabusvp_choudharyAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Activation KeyDocumento13 páginasActivation Keyheryts100% (1)
- CS31 Notes For The FinalDocumento4 páginasCS31 Notes For The FinalJason LiuAinda não há avaliações
- Hari Prasad CVDocumento3 páginasHari Prasad CVJai DeepAinda não há avaliações
- 02 Computer KeyboardDocumento12 páginas02 Computer KeyboardIsrael EyasuAinda não há avaliações
- 1602-18-737-071 ES&IOT Lab 1 - MergedDocumento139 páginas1602-18-737-071 ES&IOT Lab 1 - Mergedcity cyberAinda não há avaliações
- Libro Ingles TraducidoDocumento37 páginasLibro Ingles TraducidoGerardo MancilloAinda não há avaliações
- Paint Package Wordpad and Notepad Other Accessories of Windows Briefcase Utility of Windows 95Documento8 páginasPaint Package Wordpad and Notepad Other Accessories of Windows Briefcase Utility of Windows 95cooooool1927Ainda não há avaliações
- A Presentation On Virtual Keyboard: Submitted By:-Jugaaduengineer (Anil Saini)Documento19 páginasA Presentation On Virtual Keyboard: Submitted By:-Jugaaduengineer (Anil Saini)Prince SivaAinda não há avaliações
- PLSQL TutorialDocumento120 páginasPLSQL TutorialJackson SouzaAinda não há avaliações
- ZPL Manual ZEBRADocumento1.372 páginasZPL Manual ZEBRAForest SxnAinda não há avaliações
- Salto Basic Troubleshooting Guide For Stand-Alone EscutcheonsDocumento3 páginasSalto Basic Troubleshooting Guide For Stand-Alone EscutcheonsJunk AccountAinda não há avaliações
- 60b69a03609f7bbbbb86ea8b - IoT Architecture White Paper - HologramDocumento10 páginas60b69a03609f7bbbbb86ea8b - IoT Architecture White Paper - HologramMike HollandAinda não há avaliações
- UNIFLAIR Modbus InstructionManualDocumento20 páginasUNIFLAIR Modbus InstructionManualPrieto RamiroAinda não há avaliações
- PLC Controlled Motion Release NotesDocumento5 páginasPLC Controlled Motion Release NotesEduardo Antonio MateusAinda não há avaliações
- CS302 Mid Term Solved PapersDocumento51 páginasCS302 Mid Term Solved PapersattiqueAinda não há avaliações
- 60-Mocking - Laravel - The PHP Framework For Web ArtisansDocumento7 páginas60-Mocking - Laravel - The PHP Framework For Web ArtisansMomo SemerkhetAinda não há avaliações
- Oxygen Forensic Detective Getting Started PDFDocumento77 páginasOxygen Forensic Detective Getting Started PDFjmla69Ainda não há avaliações
- Bcd-Adder 1Documento21 páginasBcd-Adder 1PriyankaAinda não há avaliações
- Unit 3 - Principles of Programming LanguagesDocumento12 páginasUnit 3 - Principles of Programming LanguagesRohit VishwakarmaAinda não há avaliações
- Direct Memory Access: Aryasree M DDocumento26 páginasDirect Memory Access: Aryasree M DAryasree M.DAinda não há avaliações
- Use Diskpart To Create and Format PartitionsDocumento3 páginasUse Diskpart To Create and Format Partitionsronics123Ainda não há avaliações
- MQ ConnectorDocumento13 páginasMQ ConnectorSrikanth VAinda não há avaliações
- Best Practices Deploying Ha Architecture OciDocumento24 páginasBest Practices Deploying Ha Architecture OcibansalrakeshkAinda não há avaliações
- SAM CommisioningDocumento7 páginasSAM CommisioningAlex Robledo Olarte100% (2)
- APD3 InstallerEDDocumento26 páginasAPD3 InstallerEDdev.phoAinda não há avaliações
- AccelStepper Library For Arduino3Documento7 páginasAccelStepper Library For Arduino3vr_xlentAinda não há avaliações
- Micron NAND Flash MLC 16-32-64 - 128GbDocumento115 páginasMicron NAND Flash MLC 16-32-64 - 128GbSatya NarayanaAinda não há avaliações
- Dreamtech Press: NetBeans 6 in Simple StepsDocumento1 páginaDreamtech Press: NetBeans 6 in Simple StepsDreamtech100% (1)
- KUKA OfficeLite 85 enDocumento41 páginasKUKA OfficeLite 85 enMesut GuvenAinda não há avaliações
- Ejemplos de Virus de BromaDocumento3 páginasEjemplos de Virus de Bromadragonj21Ainda não há avaliações