Você também pode gostar
- Proteccion CatodicaDocumento64 páginasProteccion CatodicaLuis Enrique Saavedra GárateAinda não há avaliações
- Tabla de TransformadoresDocumento3 páginasTabla de TransformadoresAlbertoAinda não há avaliações
- TEMA 7 Baleo y Sus ObjetivosDocumento11 páginasTEMA 7 Baleo y Sus ObjetivosDeymar Luk CortezAinda não há avaliações
- Cambio ClimáticoDocumento98 páginasCambio ClimáticoAlejandro SalcedoAinda não há avaliações
- Problemas Resueltos 2011-2017 PDFDocumento37 páginasProblemas Resueltos 2011-2017 PDFhemojiAinda não há avaliações
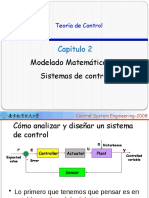
- 2016-1 Capítulo #2 Modelado Matemático de Sistemas de ControlDocumento77 páginas2016-1 Capítulo #2 Modelado Matemático de Sistemas de ControlHector Vergara100% (1)
- Nota149 Circuitos PolifasicosDocumento9 páginasNota149 Circuitos PolifasicosHector VergaraAinda não há avaliações
- Warka WaterDocumento12 páginasWarka WaterHector VergaraAinda não há avaliações
- 0875 Sistemas de Potencia I-AnálíticaDocumento5 páginas0875 Sistemas de Potencia I-AnálíticaHector VergaraAinda não há avaliações
- Teoría de Sistemas Industriales - ConferenciaDocumento52 páginasTeoría de Sistemas Industriales - ConferenciaHector VergaraAinda não há avaliações
- Warka WaterDocumento12 páginasWarka WaterHector VergaraAinda não há avaliações
- Sitemas de PotenciaDocumento3 páginasSitemas de PotenciaHector VergaraAinda não há avaliações
- 2017-TEMCap 1-2, Revisión Esencial de Matemática SadikuDocumento20 páginas2017-TEMCap 1-2, Revisión Esencial de Matemática SadikuHector VergaraAinda não há avaliações
- 2017-TEMCap 1-2, Revisión Esencial de Matemática SadikuDocumento20 páginas2017-TEMCap 1-2, Revisión Esencial de Matemática SadikuHector VergaraAinda não há avaliações
- MIT Open Course - HectorVergaraDocumento17 páginasMIT Open Course - HectorVergaraHector VergaraAinda não há avaliações
- Teoría de Sistemas Industriales - ConferenciaDocumento52 páginasTeoría de Sistemas Industriales - ConferenciaHector VergaraAinda não há avaliações
- MN ContenidoDocumento9 páginasMN ContenidoHector VergaraAinda não há avaliações
- Lec01 - Teorema de Muestreo PDFDocumento17 páginasLec01 - Teorema de Muestreo PDFDiego Alán Torres Zamarripa0% (1)
- Pirmer Parcial Práctica Problemas Campos 2016Documento33 páginasPirmer Parcial Práctica Problemas Campos 2016Hector VergaraAinda não há avaliações
- 49-2396 - Teoria de Control IIDocumento5 páginas49-2396 - Teoria de Control IIHector VergaraAinda não há avaliações
- Introducción Al Curso Campos 2016Documento152 páginasIntroducción Al Curso Campos 2016Hector VergaraAinda não há avaliações
- Ética y UniversidadDocumento15 páginasÉtica y UniversidadHector VergaraAinda não há avaliações
- MN ContenidoDocumento9 páginasMN ContenidoHector VergaraAinda não há avaliações
- Descripcion Metrologia y NormalizacionDocumento10 páginasDescripcion Metrologia y NormalizacionHector VergaraAinda não há avaliações
- Declaración Mundial de La EducacionDocumento13 páginasDeclaración Mundial de La EducacionHector VergaraAinda não há avaliações
- Codigo de InstrumentosDocumento1 páginaCodigo de InstrumentosTauriel ElfaAinda não há avaliações
- Foro 01Documento23 páginasForo 01Hector VergaraAinda não há avaliações
- Anillos ResonantesDocumento33 páginasAnillos ResonantesHector VergaraAinda não há avaliações
- Antropología EducativaDocumento13 páginasAntropología EducativaHector VergaraAinda não há avaliações
- Ex#1 NDocumento3 páginasEx#1 NHector VergaraAinda não há avaliações
- Procesamieno Digital de SeñalesDocumento5 páginasProcesamieno Digital de SeñalesHector VergaraAinda não há avaliações
- Reporte de ConsolidaciónDocumento7 páginasReporte de ConsolidaciónAngel FloresAinda não há avaliações
- Modelación Mediante Funciones de Transferencia, Ingeniería de SistemasDocumento10 páginasModelación Mediante Funciones de Transferencia, Ingeniería de SistemasEd DyAinda não há avaliações
- Panificadora Bifinett SilverCrest KH 1171Documento33 páginasPanificadora Bifinett SilverCrest KH 1171Manete71100% (1)
- La Plic No LinealDocumento5 páginasLa Plic No LinealIvan T.Ainda não há avaliações
- Fotometria de AperturaDocumento9 páginasFotometria de AperturaRafael Arango ToroAinda não há avaliações
- Coherencia Espacial TemporalDocumento2 páginasCoherencia Espacial TemporalJoseph P. VeraAinda não há avaliações
- K0000 22Documento26 páginasK0000 22Román IsraelAinda não há avaliações
- Desequilibrio en El Suministro Trifásico - Franklin Electric Noticias Del MercadoDocumento4 páginasDesequilibrio en El Suministro Trifásico - Franklin Electric Noticias Del MercadoJulio MendozaAinda não há avaliações
- Ley de FaradayDocumento3 páginasLey de FaradayPaúl Martínez0% (1)
- Difusividad ToluenoDocumento7 páginasDifusividad ToluenoRodrigo PachecoAinda não há avaliações
- Mecanica de Fluidos. HidrostaticaDocumento1 páginaMecanica de Fluidos. HidrostaticaJr Cuestas CoronadoAinda não há avaliações
- DocxDocumento8 páginasDocxnicolas alvarezAinda não há avaliações
- Relatividad Especial Notas PDFDocumento22 páginasRelatividad Especial Notas PDFCristian CamiloAinda não há avaliações
- Soluciones BufferDocumento9 páginasSoluciones BufferRoque Raycitho ElvisAinda não há avaliações
- Silabo Física General II A 2014-II UdepDocumento3 páginasSilabo Física General II A 2014-II UdepJorge Jimenez0% (1)
- Corte Basal y Fuerzas de Piso FiDocumento10 páginasCorte Basal y Fuerzas de Piso FiEnrique Jeordan Dominguez Estrada100% (1)
- D de MicroondasDocumento10 páginasD de MicroondasIlia AnguloAinda não há avaliações
- ELECTROMAGNETISMODocumento10 páginasELECTROMAGNETISMOJoel Dennis DiegoAinda não há avaliações
- Cuestionario-2 1Documento6 páginasCuestionario-2 1Eddy BosquezAinda não há avaliações
- Cómo Funcionan Las Etiquetas MagnetoDocumento5 páginasCómo Funcionan Las Etiquetas MagnetoEly Za BethAinda não há avaliações
- Aforamiento de Rios - Benites Quispe PiterDocumento20 páginasAforamiento de Rios - Benites Quispe PiterpiterAinda não há avaliações
- Guia de Seguridad para Trabajo en EscalerasDocumento13 páginasGuia de Seguridad para Trabajo en Escalerasemoncada2012Ainda não há avaliações
- Ecuaciones de FresnelDocumento8 páginasEcuaciones de FresnelArturo CruzAinda não há avaliações
- 09 Regresion y Correlacion Lineal SimpleDocumento2 páginas09 Regresion y Correlacion Lineal SimpleMarcos De LeónAinda não há avaliações
- Física: Conservación de Una Fuerza Constante y Fuerza VariableDocumento3 páginasFísica: Conservación de Una Fuerza Constante y Fuerza VariablePaloma CanteroAinda não há avaliações
- 1 El Atomo de HidrogenoDocumento18 páginas1 El Atomo de HidrogenoKriz RealesAinda não há avaliações
- Fluke - CalibradorDocumento4 páginasFluke - CalibradorKevin Supho CruzAinda não há avaliações