Você também pode gostar
- PASL MANUAL General System Description (English 060308)Documento0 páginaPASL MANUAL General System Description (English 060308)Emy ZaninkaAinda não há avaliações
- Tektronix cfg250 FunctiongeneratorDocumento37 páginasTektronix cfg250 FunctiongeneratorNaur AvilaAinda não há avaliações
- WK 2402Documento16 páginasWK 2402spagmonstaAinda não há avaliações
- E560 cmd11 CsDocumento10 páginasE560 cmd11 Cssuraiyya begumAinda não há avaliações
- Rotork Black Liquor Rev 6Documento26 páginasRotork Black Liquor Rev 6Yrty KdfgAinda não há avaliações
- GE FANUC 90-30 ManualDocumento444 páginasGE FANUC 90-30 ManualAndrei Chirilescu100% (1)
- GFK 2574DDocumento14 páginasGFK 2574DVijeesh T VargheseAinda não há avaliações
- AT155 ManualDocumento27 páginasAT155 ManualGeorge Cunha LimaAinda não há avaliações
- Control Philosophy Rafha-18.11.2004Documento14 páginasControl Philosophy Rafha-18.11.2004srigirisetty208Ainda não há avaliações
- Commissioning: Commissioning P63X/Uk Cm/A54 Micom P631, P632, P633, P634Documento30 páginasCommissioning: Commissioning P63X/Uk Cm/A54 Micom P631, P632, P633, P634Joseph Yap SabariaAinda não há avaliações
- Narco Avionics: AT155 TSO TransponderDocumento27 páginasNarco Avionics: AT155 TSO TransponderElmer Villegas0% (1)
- Umc22 FBPDocumento104 páginasUmc22 FBPWil Bruno Berrocal CárdenasAinda não há avaliações
- FMX SagemDocumento854 páginasFMX Sagemdramous1100% (3)
- V 01Documento5 páginasV 01Suresh MuthuvelAinda não há avaliações
- Duobias M 200 TM Section02 Performance SpecificationDocumento12 páginasDuobias M 200 TM Section02 Performance SpecificationtonytomsonAinda não há avaliações
- S172E - Packscan IQ Field Unit Technical ManualDocumento38 páginasS172E - Packscan IQ Field Unit Technical ManualWilmer Quishpe AndradeAinda não há avaliações
- 7200MA Manual (En) V09 PDFDocumento143 páginas7200MA Manual (En) V09 PDFtouchmemoryAinda não há avaliações
- FM 24-19Documento374 páginasFM 24-19J_an__J_onsAinda não há avaliações
- Service Manual: "!?$LU CODocumento84 páginasService Manual: "!?$LU COantomullerAinda não há avaliações
- Application Program For PCO in PLANDocumento41 páginasApplication Program For PCO in PLANelshan_asgarovAinda não há avaliações
- GPRS - Operation & Maintenance Manual - ESCDocumento25 páginasGPRS - Operation & Maintenance Manual - ESCMohammed FaresAinda não há avaliações
- RTX3Documento24 páginasRTX3Marcelo Sejas SotezAinda não há avaliações
- Option X4 Additional Operator Panel AOP-2 4189340484 UKDocumento12 páginasOption X4 Additional Operator Panel AOP-2 4189340484 UKEdni OropezaAinda não há avaliações
- 1.IC695CHS016 Gfk2554aDocumento6 páginas1.IC695CHS016 Gfk2554apsatyasrinivasAinda não há avaliações
- Installation of The Generator and Control Panel Components For Dynamic Gas BlendingDocumento49 páginasInstallation of The Generator and Control Panel Components For Dynamic Gas Blendingالمهندسوليدالطويل100% (1)
- UT Contractor InstallationDocumento18 páginasUT Contractor InstallationcariosAinda não há avaliações
- Pub059-020-00 - 0100 (Pakscan Integral FCU (Field Control Unit) Technical Manual) PDFDocumento34 páginasPub059-020-00 - 0100 (Pakscan Integral FCU (Field Control Unit) Technical Manual) PDFapisituAinda não há avaliações
- Option X4 4189340484 UK - 2013.07.01 PDFDocumento12 páginasOption X4 4189340484 UK - 2013.07.01 PDFoscarafonsoAinda não há avaliações
- AMF ReportDocumento6 páginasAMF ReportAhmed GhaniAinda não há avaliações
- Man FunctionGenerator Wavetek-FG3CDocumento11 páginasMan FunctionGenerator Wavetek-FG3CJorge AntonioAinda não há avaliações
- P 7132 BGM en A5Documento32 páginasP 7132 BGM en A5Orlando Jose Romero ReyesAinda não há avaliações
- Pub002 011 00 - 1007 PDFDocumento8 páginasPub002 011 00 - 1007 PDFdenmas73Ainda não há avaliações
- Compactrio Ni Crio-9022: Operating Instructions and SpecificationsDocumento23 páginasCompactrio Ni Crio-9022: Operating Instructions and Specificationsashraf8588100% (1)
- TK 8302 SMDocumento52 páginasTK 8302 SMbm2gjpAinda não há avaliações
- TB 429-15-42-RB Page 1 of 27 Approved For Public ReleaseDocumento27 páginasTB 429-15-42-RB Page 1 of 27 Approved For Public ReleaseDadangAinda não há avaliações
- Dip5k Enin A22Documento38 páginasDip5k Enin A22Edyson91Ainda não há avaliações
- 3G4010CF V4-0 IM Eng 29009088R002 enDocumento32 páginas3G4010CF V4-0 IM Eng 29009088R002 enTyler HiggsAinda não há avaliações
- GEK-65280 MKII Control Panel ManualDocumento168 páginasGEK-65280 MKII Control Panel ManualAmarDameneAinda não há avaliações
- 21-Light Remote Annunciator: Owner's ManualDocumento12 páginas21-Light Remote Annunciator: Owner's ManualpicoucrAinda não há avaliações
- Dthoii 631355907Documento22 páginasDthoii 631355907Nigel RamkhalawanAinda não há avaliações
- MA7200 Installation ManualDocumento169 páginasMA7200 Installation ManualWilmer AlegriaAinda não há avaliações
- MV 3000 Getting Started ManualDocumento160 páginasMV 3000 Getting Started ManualterranohrAinda não há avaliações
- GFK 0898 FDocumento420 páginasGFK 0898 FJerichoAinda não há avaliações
- Installation Instructions: Triangle Microsystems Inc. 2716 Discovery Drive Raleigh, N.C. 27616 (919) 878-1880Documento13 páginasInstallation Instructions: Triangle Microsystems Inc. 2716 Discovery Drive Raleigh, N.C. 27616 (919) 878-1880Brandon CatronAinda não há avaliações
- 1.2M Ku BAND RXTXDocumento15 páginas1.2M Ku BAND RXTXJoseph EdwardsAinda não há avaliações
- NPS/003/017 - Technical Specification For A Ground Mounted Distribution Switchgear Remote Control SystemDocumento17 páginasNPS/003/017 - Technical Specification For A Ground Mounted Distribution Switchgear Remote Control SystemkotiniAinda não há avaliações
- 74 3441Documento104 páginas74 3441GUZMANAinda não há avaliações
- ManualDocumento28 páginasManualKarel GómezAinda não há avaliações
- Automatic Voltage Regulator AVR100S Operation, Use and Maintenance InstructionsDocumento65 páginasAutomatic Voltage Regulator AVR100S Operation, Use and Maintenance InstructionsYassine.G ChipLabAinda não há avaliações
- SuperElf G2 Manual GB ROJDocumento23 páginasSuperElf G2 Manual GB ROJRohidas Vilas PawarAinda não há avaliações
- Level 37,38-High AmbiantDocumento8 páginasLevel 37,38-High Ambiantnassar_aymanAinda não há avaliações
- Ic 693 Cpu 313Documento5 páginasIc 693 Cpu 313mubashersaeedAinda não há avaliações
- PIC II ConversionDocumento4 páginasPIC II Conversionjrcivic19Ainda não há avaliações
- Kenwood - TK-2160 - 3160 Service ManualDocumento42 páginasKenwood - TK-2160 - 3160 Service ManualcornelisjjAinda não há avaliações
- MillenniumDocumento20 páginasMillenniumYasmeenAT TradingAinda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Ainda não há avaliações
- Radio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142No EverandRadio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142Ainda não há avaliações
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosNo EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosNota: 5 de 5 estrelas5/5 (1)
- Industrial Diaphragm Valves: SaundersDocumento14 páginasIndustrial Diaphragm Valves: SaundersscribdkhatnAinda não há avaliações
- 10 Vedlegg DDocumento14 páginas10 Vedlegg DscribdkhatnAinda não há avaliações
- Connection of Redundant I/O Devices To S7-1500: Lredio LibraryDocumento31 páginasConnection of Redundant I/O Devices To S7-1500: Lredio LibraryscribdkhatnAinda não há avaliações
- 6.6 Wiring Diagram 6.6.1 Version GCP-20 & AMG 3/NEBDocumento1 página6.6 Wiring Diagram 6.6.1 Version GCP-20 & AMG 3/NEBscribdkhatnAinda não há avaliações
- 3500 Monitoring SystemsDocumento12 páginas3500 Monitoring SystemsscribdkhatnAinda não há avaliações
- Boiler Controls and Systems: An OverviewDocumento8 páginasBoiler Controls and Systems: An OverviewscribdkhatnAinda não há avaliações
- Equipment Marking: IEC/CENELEC (Global/Europe) ATEX (European Union)Documento1 páginaEquipment Marking: IEC/CENELEC (Global/Europe) ATEX (European Union)scribdkhatnAinda não há avaliações
- Diesel ECU and Fuel Injector DriversDocumento32 páginasDiesel ECU and Fuel Injector DriversscribdkhatnAinda não há avaliações
- Extinguishing Control Unit A6V10061857 HQ enDocumento38 páginasExtinguishing Control Unit A6V10061857 HQ enscribdkhatn0% (1)
- Bently Nevada 22MDocumento9 páginasBently Nevada 22MscribdkhatnAinda não há avaliações
- t34 04 PDFDocumento10 páginast34 04 PDFscribdkhatnAinda não há avaliações
- Abhar Wire + Cable Co.: ISO 9002 QS-1147HHDocumento34 páginasAbhar Wire + Cable Co.: ISO 9002 QS-1147HHscribdkhatnAinda não há avaliações
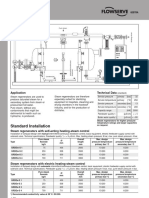
- Steam Regenerators: Application Technical DataDocumento1 páginaSteam Regenerators: Application Technical DatascribdkhatnAinda não há avaliações
- Faults Detection in Gas Turbine Rotor Using Vibration Analysis Under Varying ConditionsDocumento14 páginasFaults Detection in Gas Turbine Rotor Using Vibration Analysis Under Varying ConditionsscribdkhatnAinda não há avaliações
- GMS Flammable DetectionHeadDocumento1 páginaGMS Flammable DetectionHeadscribdkhatnAinda não há avaliações
- An 3100D AnnunciatorDocumento4 páginasAn 3100D AnnunciatorscribdkhatnAinda não há avaliações
- Power CadDocumento1 páginaPower CadscribdkhatnAinda não há avaliações
- Csi BR Onlinemachinery PDFDocumento2 páginasCsi BR Onlinemachinery PDFscribdkhatnAinda não há avaliações
- Juniper ConfigurationDocumento3 páginasJuniper Configurationkrishna0224Ainda não há avaliações
- Peperiksaan Percubaan Selangor Ict SPM 09Documento23 páginasPeperiksaan Percubaan Selangor Ict SPM 09winyeeAinda não há avaliações
- Deface A WebsiteDocumento6 páginasDeface A WebsiteEvelyn-DavidBonteanAinda não há avaliações
- Service Manual Brother ADS 2500/2600Documento150 páginasService Manual Brother ADS 2500/2600João Ricardo Almeida Prado100% (2)
- Eltek R7121-L1 Eltek R7141-L1 Eltek R7111-L1: User ManualDocumento62 páginasEltek R7121-L1 Eltek R7141-L1 Eltek R7111-L1: User ManualРуслан МайбородаAinda não há avaliações
- Docker Study GuideDocumento12 páginasDocker Study GuideDaniel De Los Santos LugoAinda não há avaliações
- IP-PDU User ManualDocumento22 páginasIP-PDU User ManualWawanku WawankuAinda não há avaliações
- OPC-2 Installation and Commissioning (MVJ Sun Web Version 4.3) R0-I (Encrypted)Documento56 páginasOPC-2 Installation and Commissioning (MVJ Sun Web Version 4.3) R0-I (Encrypted)Андрюха ЛуценкоAinda não há avaliações
- Aodv Slide FinalDocumento13 páginasAodv Slide Finalremarkm55100% (1)
- CT Block DiagramDocumento1 páginaCT Block DiagramMario RamosAinda não há avaliações
- Energy Monitoring 2018Documento4 páginasEnergy Monitoring 2018DityoKreshnaArgeshwaraAinda não há avaliações
- User Manual: DSL-2875ALDocumento103 páginasUser Manual: DSL-2875ALramonmartinezcatalaAinda não há avaliações
- (GENORAY) DICOM Conformance Statement For ZENISDocumento32 páginas(GENORAY) DICOM Conformance Statement For ZENISIsmael Díaz de GraciaAinda não há avaliações
- IJERD Paper FormatDocumento4 páginasIJERD Paper FormatAfreen BhumgaraAinda não há avaliações
- 11-23 Student Success GuideDocumento52 páginas11-23 Student Success Guideapi-299512736Ainda não há avaliações
- Habbo Safety SakjfkasDocumento3 páginasHabbo Safety SakjfkasAraceelii SalazzarAinda não há avaliações
- Multicast Multipath Power Efficient RoutingDocumento25 páginasMulticast Multipath Power Efficient RoutingPreeti SinghAinda não há avaliações
- REsilient Ethernet ProtocolDocumento22 páginasREsilient Ethernet Protocolandresfcl83Ainda não há avaliações
- Cisco 800M Series Integrated Services Routers Software Configuration GuideDocumento134 páginasCisco 800M Series Integrated Services Routers Software Configuration GuideSteven HtooAinda não há avaliações
- HP Slimline 270-p041d Desktop PC Product Specifications - HP® Customer SupportDocumento21 páginasHP Slimline 270-p041d Desktop PC Product Specifications - HP® Customer Supportonard_deardoAinda não há avaliações
- Ospf TableDocumento111 páginasOspf TableVignesh GaneshAinda não há avaliações
- AVNISH C (1) .V NewDocumento3 páginasAVNISH C (1) .V NewprimohAinda não há avaliações
- Securing Windows 2003 ServerDocumento9 páginasSecuring Windows 2003 ServerNaveenAinda não há avaliações
- New Microsoft Word DocumentDocumento14 páginasNew Microsoft Word DocumentElvesius Xavier JohniusAinda não há avaliações
- Fastiron 08070 UpgradeguideDocumento59 páginasFastiron 08070 UpgradeguideDaniel MontesAinda não há avaliações
- AIMS Updated Guidelines For IP 0402108Documento22 páginasAIMS Updated Guidelines For IP 0402108vojkantmsAinda não há avaliações
- Backlink Sources PDFDocumento29 páginasBacklink Sources PDFEnnovive TechAinda não há avaliações
- GWT 2.3Documento469 páginasGWT 2.3beatrix_boda_1Ainda não há avaliações
- (Management in Xiaomi With Respect To Planning) : Nmims Sol Principles of ManagementDocumento28 páginas(Management in Xiaomi With Respect To Planning) : Nmims Sol Principles of ManagementDevesh Mohan0% (2)