Você também pode gostar
- Universal Basic IncomeDocumento32 páginasUniversal Basic IncomeparadoxendazzlingAinda não há avaliações
- Gaming SocialDocumento15 páginasGaming SocialparadoxendazzlingAinda não há avaliações
- UTS2101 Syllabus AY2015 Sem 1Documento7 páginasUTS2101 Syllabus AY2015 Sem 1paradoxendazzlingAinda não há avaliações
- EG2401 Lec 6 14-15sem2 (Compatibility Mode)Documento31 páginasEG2401 Lec 6 14-15sem2 (Compatibility Mode)paradoxendazzlingAinda não há avaliações
- Hips (High Impact Polystyrene) : Advantages of HIPS: Applications IncludeDocumento1 páginaHips (High Impact Polystyrene) : Advantages of HIPS: Applications IncludeparadoxendazzlingAinda não há avaliações
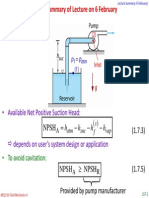
- Cavitation in Pumps: NPSH (1.7.3)Documento2 páginasCavitation in Pumps: NPSH (1.7.3)paradoxendazzlingAinda não há avaliações
- ME3122 Handbook of Heat Transfer Equations 2014Documento22 páginasME3122 Handbook of Heat Transfer Equations 2014howsky31Ainda não há avaliações
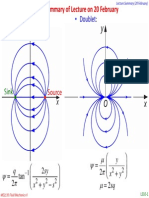
- Source: - DoubletDocumento4 páginasSource: - DoubletparadoxendazzlingAinda não há avaliações
- ME2135 Lecture Summary 21janDocumento4 páginasME2135 Lecture Summary 21janparadoxendazzlingAinda não há avaliações
- V U Vds Udx Vdy Dxdy Dxdy X Y: Counterclockwise Line IntegralDocumento1 páginaV U Vds Udx Vdy Dxdy Dxdy X Y: Counterclockwise Line IntegralparadoxendazzlingAinda não há avaliações
- Gatsby: Chapter SevenDocumento1 páginaGatsby: Chapter SevenparadoxendazzlingAinda não há avaliações
- Chapter 1 Sept 12Documento39 páginasChapter 1 Sept 12paradoxendazzlingAinda não há avaliações
- FI NotesDocumento1.069 páginasFI NotesparadoxendazzlingAinda não há avaliações
- Theory Test 1 NotesDocumento6 páginasTheory Test 1 NotesparadoxendazzlingAinda não há avaliações
- ME2135 QUIZ - February 2010Documento6 páginasME2135 QUIZ - February 2010paradoxendazzlingAinda não há avaliações
- Impact of World War I Treaty of VersaillesDocumento4 páginasImpact of World War I Treaty of VersaillesparadoxendazzlingAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
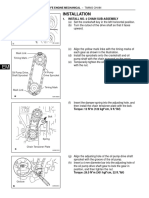
- Sincronizacion de Motor Toyota 2az-FeDocumento12 páginasSincronizacion de Motor Toyota 2az-FeWilliams NavasAinda não há avaliações
- AULA 13 - RespondidoDocumento4 páginasAULA 13 - RespondidoRanyelle WanessaAinda não há avaliações
- TORONTO01Documento2 páginasTORONTO01itrcentre07Ainda não há avaliações
- Dehp 780 MPDocumento104 páginasDehp 780 MPVitorAinda não há avaliações
- Ht-Discharge Pipes and Fittings (PPS) : KunststoffeDocumento35 páginasHt-Discharge Pipes and Fittings (PPS) : Kunststoffeluis eduardo ramos rebataAinda não há avaliações
- ABB Ability Safety Plus For Hoists BrochureDocumento12 páginasABB Ability Safety Plus For Hoists BrochureCarlos Bruno MatosAinda não há avaliações
- Software Quality Assurance IntroductionDocumento72 páginasSoftware Quality Assurance Introductionfmohiy100% (6)
- Basic ProbabilityDocumento53 páginasBasic ProbabilityGhada SheashaAinda não há avaliações
- Current Volt Meter Ina219Documento40 páginasCurrent Volt Meter Ina219sas999333Ainda não há avaliações
- RAEX 300 DatasheetDocumento2 páginasRAEX 300 Datasheetabdulloh_99Ainda não há avaliações
- Quality Related QuestionsDocumento22 páginasQuality Related QuestionsHotPriyu OnlyforgalsAinda não há avaliações
- 440T4 4T60 4t60e 4t65eDocumento24 páginas440T4 4T60 4t60e 4t65eFTompkins73100% (4)
- Guidelines in Test ConstructionDocumento8 páginasGuidelines in Test ConstructionSharlene Fae Fabicon86% (7)
- 4a Bulk Water Meter Installation in Chamber DrawingPEWSTDAMI004 PDFDocumento1 página4a Bulk Water Meter Installation in Chamber DrawingPEWSTDAMI004 PDFRonald ValenciaAinda não há avaliações
- Manual Ni Usrp 2920Documento56 páginasManual Ni Usrp 2920Anghye Plata100% (1)
- Rescue Boat Lsa 5.1Documento4 páginasRescue Boat Lsa 5.1Celal BozdoganAinda não há avaliações
- 1 Pre-Lab: Lab 07: Sampling, Convolution, and FIR FilteringDocumento12 páginas1 Pre-Lab: Lab 07: Sampling, Convolution, and FIR Filteringdemetrickn0% (1)
- QA/QC Filling INDEX: North Gas Compression Plants (NGCP) Pipelines Index File Name File #Documento3 páginasQA/QC Filling INDEX: North Gas Compression Plants (NGCP) Pipelines Index File Name File #deva017Ainda não há avaliações
- AM3KA539 Combined Depth/Tension Measurement Device: With Low Voltage Tension AmplifierDocumento27 páginasAM3KA539 Combined Depth/Tension Measurement Device: With Low Voltage Tension AmplifierDiego CorderoAinda não há avaliações
- Final Project Miguel Santana GallegoDocumento44 páginasFinal Project Miguel Santana GallegoDaniel PereiraAinda não há avaliações
- Design of BaseplateDocumento9 páginasDesign of BaseplatejohnAinda não há avaliações
- En 10268Documento4 páginasEn 10268Alex LacerdaAinda não há avaliações
- MD RAKIBUL ISLAM Update CVDocumento2 páginasMD RAKIBUL ISLAM Update CVনীল বেদনাAinda não há avaliações
- Commodity Sourcing Strategy ProjectDocumento5 páginasCommodity Sourcing Strategy ProjectMohit TalwarAinda não há avaliações
- Palfinger PK 15500 Load ChartDocumento2 páginasPalfinger PK 15500 Load ChartD Chandra Sekhar100% (2)
- Case Study FormatDocumento2 páginasCase Study FormatMarianel Antiqueña EspinosaAinda não há avaliações
- Direct Current Generator ReviewerDocumento16 páginasDirect Current Generator ReviewerCaitriona AngeletteAinda não há avaliações
- Chapter 13: Worksheet Mark SchemeDocumento2 páginasChapter 13: Worksheet Mark SchemeAdam DanialAinda não há avaliações
- Superb 2 Aditional HeaterDocumento2 páginasSuperb 2 Aditional Heaterpalle larsenAinda não há avaliações