Você também pode gostar
- I2C Protocol in Fpga Using VHDL: Main Project Interim Report As A Partial Fullment of The CurriculumDocumento18 páginasI2C Protocol in Fpga Using VHDL: Main Project Interim Report As A Partial Fullment of The CurriculumShuvra Saha100% (1)
- Agribot Project PresentationDocumento21 páginasAgribot Project Presentationumaiya1990100% (1)
- I2c Rev03Documento17 páginasI2c Rev03varunmr100% (1)
- Overview of The Inter-Integrated Circuit (I C) Bus: 2 ECPE 4536 Microprocessor System Design II Virginia TechDocumento7 páginasOverview of The Inter-Integrated Circuit (I C) Bus: 2 ECPE 4536 Microprocessor System Design II Virginia Techdineshvhaval100% (1)
- Interfacing Example - 16 Character X 2 Line LCD: DescriptionDocumento5 páginasInterfacing Example - 16 Character X 2 Line LCD: DescriptionManish Kumar sharma100% (1)
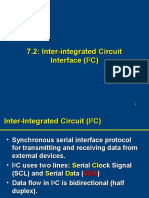
- Section 7.2 - I2CNewMarch27Documento32 páginasSection 7.2 - I2CNewMarch27Andy Wo100% (1)
- ADC Through SPIDocumento4 páginasADC Through SPIChiquita White100% (1)
- An-960 RS 485 Incl Termination DetailsDocumento12 páginasAn-960 RS 485 Incl Termination Detailsqafqgibsonq4543100% (1)
- Introduction I2c and SPIDocumento14 páginasIntroduction I2c and SPIHaris Jeelani100% (1)
- Spi and I2cDocumento11 páginasSpi and I2cAbhay Tomar100% (1)
- AVR Hardware Design ConsiderationsDocumento14 páginasAVR Hardware Design ConsiderationsAmarnath M Damodaran100% (1)
- LCD - GDM1602BDocumento10 páginasLCD - GDM1602BElanio Julio100% (1)
- Instructions Assembler DirectivespptDocumento22 páginasInstructions Assembler DirectivespptAntra Gurain100% (1)
- Book PIC Microcontrollers-Chapter 5 CCP ModulesDocumento17 páginasBook PIC Microcontrollers-Chapter 5 CCP ModulesHammamiSalah100% (1)
- JHD12864Documento15 páginasJHD12864dravife100% (1)
- Eeeb371 Pic Exp6newDocumento7 páginasEeeb371 Pic Exp6newSalemAbaad100% (2)
- SPI Master Core Specification: Author: Simon SrotDocumento14 páginasSPI Master Core Specification: Author: Simon SrotManoj Kumar100% (1)
- CCP PWMDocumento19 páginasCCP PWMalaa_saq100% (1)
- Open Core SpiDocumento13 páginasOpen Core SpiBhanu Pratap Singh100% (1)
- Inter Integrated Circuit Bus Protocol (I C) : By: Prof. Mitesh LimachiaDocumento53 páginasInter Integrated Circuit Bus Protocol (I C) : By: Prof. Mitesh LimachiaFarman Rizvi100% (2)
- PIC18 Pulse Width ModulationDocumento16 páginasPIC18 Pulse Width ModulationAnoj Pahathkumbura100% (1)
- Design and Functional Verification of I2C Master Core Using OVMDocumento6 páginasDesign and Functional Verification of I2C Master Core Using OVMPraveen Kumar100% (1)
- Document Mini Project No 1.117Documento8 páginasDocument Mini Project No 1.117rahmat100% (1)
- Aerosemi: Features ApplicationsDocumento9 páginasAerosemi: Features Applicationsttnaing100% (1)
- Nec Ir For PicDocumento14 páginasNec Ir For Picsudhakar5472100% (1)
- LCD162C# DatenblattDocumento8 páginasLCD162C# Datenblattgeorgschmied100% (1)
- Bascom and AVR, RS-232Documento10 páginasBascom and AVR, RS-232akbar100% (1)
- Hobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Documento7 páginasHobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Luciana Gutierrez Salazar100% (1)
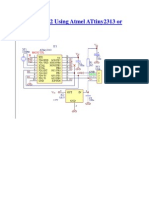
- USB-to-RS232 Using Atmel ATtiny2313 or ATmega8Documento4 páginasUSB-to-RS232 Using Atmel ATtiny2313 or ATmega8mikcomi100% (1)
- CCP ModuleDocumento11 páginasCCP ModuleAltaaf Mulani100% (1)
- CD4063 CD4040 CD4001 CD4069: CD40110 Circuit: 8-BIT BINARY-TO-DECIMAL CONVERTERDocumento1 páginaCD4063 CD4040 CD4001 CD4069: CD40110 Circuit: 8-BIT BINARY-TO-DECIMAL CONVERTERDrNikhil Agrawal100% (1)
- High Voltage Power Operational Amplifiers: Features DescriptionDocumento6 páginasHigh Voltage Power Operational Amplifiers: Features DescriptionWaqas Ayub100% (1)
- Guia Basica de Ejercicios-ProtonDocumento59 páginasGuia Basica de Ejercicios-ProtonFatality Joseph100% (1)
- HBridgeMotorControl With PICDocumento11 páginasHBridgeMotorControl With PICcoceicr100% (3)
- 8086 PPTDocumento30 páginas8086 PPTKavitha Subramaniam100% (1)
- Understanding I2C BusDocumento8 páginasUnderstanding I2C BusMai Khoa100% (1)
- Selecting and Using RS-232, RS-422, and RS-485 Serial Data StandardsDocumento9 páginasSelecting and Using RS-232, RS-422, and RS-485 Serial Data StandardsCarlos Roman Zarza100% (1)
- RS-232, RS-422, RS-485 Serial Communication General ConceptsDocumento7 páginasRS-232, RS-422, RS-485 Serial Communication General ConceptsVidhya Dharan100% (1)
- E:/#0-2S2017/#1-TEC - SELDI/SAP-02 - Projeto Forno MCU/SELDI - SAP-02 MCU - FW/Forno - DSET-SAP01 - 137-V1.X/forno.hDocumento7 páginasE:/#0-2S2017/#1-TEC - SELDI/SAP-02 - Projeto Forno MCU/SELDI - SAP-02 MCU - FW/Forno - DSET-SAP01 - 137-V1.X/forno.hVinícius Lopes Sampaio100% (1)
- Jeu D'instructions Des Microcontrôleurs PICDocumento17 páginasJeu D'instructions Des Microcontrôleurs PICzabderrezzak100% (1)
- PIC Introduction PDFDocumento46 páginasPIC Introduction PDFPeeyush Kp100% (1)
- I2c CommunicationDocumento9 páginasI2c CommunicationSanjay Sharma100% (2)
- PIC Microcontroller ArchitectureDocumento20 páginasPIC Microcontroller ArchitecturePeeyush Kp100% (1)
- Ch8 ASSEMBLER PDFDocumento11 páginasCh8 ASSEMBLER PDFCôngHoàng100% (2)
- LCD HandshakingDocumento19 páginasLCD HandshakingNvskinId100% (1)
- Tech ME007 PDFDocumento12 páginasTech ME007 PDFfredniels100% (2)
- Embedded ARM Starter KitDocumento3 páginasEmbedded ARM Starter KitEmblitz Rajajinagar100% (2)
- 6.3 LCD and KeypadDocumento22 páginas6.3 LCD and KeypadZahier Asyraf100% (2)
- Moving Up To ARMDocumento128 páginasMoving Up To ARMlilianfis100% (1)
- LCD Screen 8051Documento23 páginasLCD Screen 8051ahimpli100% (2)
- Rc2004a Biw EsxDocumento22 páginasRc2004a Biw EsxMarin Baiasu100% (1)
- PWM Using Ic555Documento1 páginaPWM Using Ic555Sachin Arora100% (1)
- Hws 13642Documento3 páginasHws 13642dhieward100% (2)
- Esp8266 For Epd-Sch092eDocumento1 páginaEsp8266 For Epd-Sch092ejhonatan cock100% (1)
- PT2312E SDocumento5 páginasPT2312E Sguillecompaq100% (1)
- ZadatciDocumento22 páginasZadatciTakticar100% (1)
- Doc2564 Twi Avr MSTRDocumento14 páginasDoc2564 Twi Avr MSTRRov GhoshAinda não há avaliações
- Atmel 2564 Using The TWI Module As I2C Master ApplicationNote AVR315Documento14 páginasAtmel 2564 Using The TWI Module As I2C Master ApplicationNote AVR315Abigail PanozoAinda não há avaliações
- Atmel 2565 Using The Twi Module As I2c Slave - Applicationnote - Avr311Documento14 páginasAtmel 2565 Using The Twi Module As I2c Slave - Applicationnote - Avr311m3y54mAinda não há avaliações
- WAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksNo EverandWAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksAinda não há avaliações
- Accomplishment Report in ESPDocumento7 páginasAccomplishment Report in ESPAldrin Perez85% (39)
- AIS - 007 - Rev 5 - Table - 1Documento21 páginasAIS - 007 - Rev 5 - Table - 1Vino Joseph VargheseAinda não há avaliações
- HC110110007 Data Forwarding ScenarioDocumento17 páginasHC110110007 Data Forwarding ScenariojscansinoAinda não há avaliações
- GCCE RaptorDocumento4 páginasGCCE RaptorSayidina PanjaitanAinda não há avaliações
- DC GenDocumento66 páginasDC Genjonathan_awayan733286% (71)
- FLIX Luggage Tags 8055071906Documento1 páginaFLIX Luggage Tags 8055071906Bhargav RamAinda não há avaliações
- Logic SelectivityDocumento6 páginasLogic SelectivitymoosuhaibAinda não há avaliações
- Aluminum History PDFDocumento20 páginasAluminum History PDFelmardaAinda não há avaliações
- CATIA V5 - Administration Des Standards Du Module Drafting PDFDocumento23 páginasCATIA V5 - Administration Des Standards Du Module Drafting PDFmilasko86Ainda não há avaliações
- Ruth Clark ResumeDocumento2 páginasRuth Clark Resumeapi-288708541Ainda não há avaliações
- "Truthland": Chesapeake S Rebuttal To GaslandDocumento14 páginas"Truthland": Chesapeake S Rebuttal To GaslandJames "Chip" NorthrupAinda não há avaliações
- Lecture-4: Data Communication and Computer NetworksDocumento24 páginasLecture-4: Data Communication and Computer NetworksSaifuddin Mohammed TarekAinda não há avaliações
- Collateral Document Management System: User'S ManualDocumento10 páginasCollateral Document Management System: User'S ManualGerard DGAinda não há avaliações
- ALR Compact Repeater: Future On DemandDocumento62 páginasALR Compact Repeater: Future On DemandmickycachoperroAinda não há avaliações
- 04 Cuculic Celic PrencDocumento8 páginas04 Cuculic Celic PrencStanislava RokvicAinda não há avaliações
- Betriebsanleitung Engl PDFDocumento812 páginasBetriebsanleitung Engl PDFotipi100% (3)
- Schlafhorst Texlab: Catalogue of ServicesDocumento27 páginasSchlafhorst Texlab: Catalogue of ServicesvenkatspinnerAinda não há avaliações
- C QuestionsDocumento22 páginasC QuestionsSeethalam ManushaAinda não há avaliações
- 07-GB Column BasesDocumento14 páginas07-GB Column BasesAUNGPSAinda não há avaliações
- HCF Spec 190 1.0 PDFDocumento31 páginasHCF Spec 190 1.0 PDFvikulovAinda não há avaliações
- Digital Market Space in BeautyDocumento48 páginasDigital Market Space in BeautyInaAinda não há avaliações
- Relocation SurveyDocumento2 páginasRelocation SurveyMarco ConopioAinda não há avaliações
- Ertalyte TXDataDocumento5 páginasErtalyte TXDatavizcensoAinda não há avaliações
- Usermanual en Manual Arium Bagtanks WH26010 ADocumento33 páginasUsermanual en Manual Arium Bagtanks WH26010 AԳոռ ԽաչատրյանAinda não há avaliações
- Building A Custom Rifle StockDocumento38 páginasBuilding A Custom Rifle Stock24HR Airgunner Channel100% (1)
- Motor Basics Lecture PDFDocumento23 páginasMotor Basics Lecture PDFRichardAinda não há avaliações
- Type of Ac StatementDocumento3 páginasType of Ac StatementRoberto SmithAinda não há avaliações
- Appendix A.ivankova, Et Al.2006Documento34 páginasAppendix A.ivankova, Et Al.2006Ismet EliskalAinda não há avaliações
- Manual Do Usuario de Automatizadores Deslizantes CE2017 InglesDocumento2 páginasManual Do Usuario de Automatizadores Deslizantes CE2017 InglesTasso ParteliAinda não há avaliações
- Xample Program in C++ Using File Handling To Perform Following OperationsDocumento6 páginasXample Program in C++ Using File Handling To Perform Following OperationsNamita SahuAinda não há avaliações