Você também pode gostar
- Informe Ley FaradayDocumento12 páginasInforme Ley Faradaynaniolarte3330% (1)
- Diseño Deun Borrador Mecanico para Pizarra AcrilicaDocumento40 páginasDiseño Deun Borrador Mecanico para Pizarra AcrilicaMichael PachecoAinda não há avaliações
- Actividad 05 - CYT 3° SecundariaDocumento9 páginasActividad 05 - CYT 3° SecundariaSamuel PanaifoAinda não há avaliações
- Máquina de GoldbergDocumento5 páginasMáquina de GoldbergJHOJAN ESNEIDER ACELDAS CASTROAinda não há avaliações
- Modelado de Sistemas DinamicosDocumento30 páginasModelado de Sistemas DinamicossoniaAinda não há avaliações
- Previo P7Documento5 páginasPrevio P7GIsAinda não há avaliações
- Fuerzas Resistivas y Rapidez TerminalDocumento3 páginasFuerzas Resistivas y Rapidez TerminalMARIA PAOLA JOVEN SIERRAAinda não há avaliações
- Dinamica Ejercicios Examen 1º BachilleratoDocumento6 páginasDinamica Ejercicios Examen 1º BachilleratoMaria RepisoAinda não há avaliações
- Taller de AvogadroDocumento4 páginasTaller de AvogadroJohnSalmonAinda não há avaliações
- Taller Sobre Las Leyes de Newton Fisica BasicaDocumento4 páginasTaller Sobre Las Leyes de Newton Fisica BasicaBIANCA LINETTE DE LA ROSA REYESAinda não há avaliações
- Tema 3 - Cuestiones y ProblemasDocumento8 páginasTema 3 - Cuestiones y ProblemasDeme CueVerAinda não há avaliações
- Ecuaciones Del Movimiento Circular UniformeDocumento21 páginasEcuaciones Del Movimiento Circular UniformeAlexsacerdoteAinda não há avaliações
- Iii. Estudios Geológicos, Geofisicos y GeotécnicosDocumento44 páginasIii. Estudios Geológicos, Geofisicos y GeotécnicosEdwin ChavezAinda não há avaliações
- Tarea 1 - Yenny - Valencia - Grupo201102A-474Documento36 páginasTarea 1 - Yenny - Valencia - Grupo201102A-474yenny valenciaAinda não há avaliações
- Fallas y Aplicaciones de SMPSDocumento19 páginasFallas y Aplicaciones de SMPSstudskirbyAinda não há avaliações
- Gases Gay Lussac y CharlesDocumento22 páginasGases Gay Lussac y Charlesmarco antoniAinda não há avaliações
- ElectronegatividadDocumento2 páginasElectronegatividadMelissa HuertaAinda não há avaliações
- La Energia Interna Del PlanetaDocumento4 páginasLa Energia Interna Del Planetahamaya92Ainda não há avaliações
- Taller de Estructuras CristalinasDocumento7 páginasTaller de Estructuras CristalinasJean Pierre Leon Bueno OsorioAinda não há avaliações
- Es Manual Vat2000 PDFDocumento183 páginasEs Manual Vat2000 PDFJeam AdeccoAinda não há avaliações
- Ondas Guiadas y Guia RectangularDocumento52 páginasOndas Guiadas y Guia RectangularGabriela TorresAinda não há avaliações
- ORONA Arca Manual PDFDocumento300 páginasORONA Arca Manual PDFVilla Robert Ramoa92% (12)
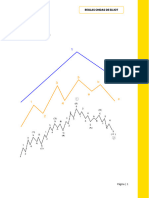
- Reglas Ondas de ElliotDocumento15 páginasReglas Ondas de ElliotSamuel SorianoAinda não há avaliações
- Estatica I 2006Documento7 páginasEstatica I 2006nicolas dionisio ordonez barruetaAinda não há avaliações
- Corona CircularDocumento1 páginaCorona CircularPRizila Gomez RodriguezAinda não há avaliações
- Goethe KantDocumento28 páginasGoethe KantJosé María Pérez ChecaAinda não há avaliações
- Acumulador de Orgón - ManualDocumento6 páginasAcumulador de Orgón - Manualelnarigazo100% (2)
- Informe N°5 Laboratorio de Transferencia de Calor - Escuela Politécnica NacionalDocumento22 páginasInforme N°5 Laboratorio de Transferencia de Calor - Escuela Politécnica NacionalAntonio CajasAinda não há avaliações
- Modelado Matemático de Sistemas EléctricosDocumento7 páginasModelado Matemático de Sistemas EléctricosAndres CespedesAinda não há avaliações