Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Piezoelectric ActuatorsDocumento12 páginasPiezoelectric ActuatorsKishore SaiAinda não há avaliações
- Piezoelectric ActuatorsDocumento12 páginasPiezoelectric ActuatorsKishore SaiAinda não há avaliações
- Contemporary Issues in MarketingDocumento23 páginasContemporary Issues in MarketingKumaran Balasubramanian0% (1)
- NASA Technical Paper 3675: A Survey of Theoretical and Experimental Coaxial Rotor Aerodynamic ResearchDocumento34 páginasNASA Technical Paper 3675: A Survey of Theoretical and Experimental Coaxial Rotor Aerodynamic ResearchThomas MouraAinda não há avaliações
- HILTI Direct Fastening Technical Guide - Ed 18Documento212 páginasHILTI Direct Fastening Technical Guide - Ed 18rodriguez.gaytanAinda não há avaliações
- AC Winding Analysis Using Winding Function ApproachDocumento21 páginasAC Winding Analysis Using Winding Function ApproachPriteem BeheraAinda não há avaliações
- Autonomous Navigation and Localization in Service Mobile RoboticsDocumento8 páginasAutonomous Navigation and Localization in Service Mobile RoboticsPriteem BeheraAinda não há avaliações
- 6axis Scara RobotDocumento1 página6axis Scara RobotPriteem BeheraAinda não há avaliações
- Image Guided RobotDocumento6 páginasImage Guided RobotPriteem BeheraAinda não há avaliações
- Tu Robot ControlDocumento22 páginasTu Robot ControlSarvesh NaikAinda não há avaliações
- Indian Institute of Technology Patna Practice Set - SE503: 2014-15Documento1 páginaIndian Institute of Technology Patna Practice Set - SE503: 2014-15Priteem BeheraAinda não há avaliações
- Ubd WonderDocumento13 páginasUbd Wonderapi-422461005100% (1)
- Technological, Legal and Ethical ConsiderationsDocumento21 páginasTechnological, Legal and Ethical ConsiderationsAngela Dudley100% (2)
- Presentation Title: Debugging Simulation ModelsDocumento74 páginasPresentation Title: Debugging Simulation ModelsflyingdreamsAinda não há avaliações
- Dilg Joincircular 2018814 - 80736aa36cDocumento10 páginasDilg Joincircular 2018814 - 80736aa36clexay.mangadosiervoAinda não há avaliações
- Service QualityDocumento11 páginasService QualityMang Abdul RohmatAinda não há avaliações
- D5 Novtek Premium Tile Adhesive TDSDocumento2 páginasD5 Novtek Premium Tile Adhesive TDSJILBERT DORIAAinda não há avaliações
- Database Architecture and Concepts ExplainedDocumento17 páginasDatabase Architecture and Concepts Explainedshabbirjamali0% (1)
- Agilent 700 Series ICP-OESDocumento52 páginasAgilent 700 Series ICP-OESRoger ManzanarezAinda não há avaliações
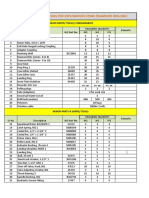
- Minimum drilling supplies stockDocumento3 páginasMinimum drilling supplies stockAsif KhanzadaAinda não há avaliações
- Brochure Ergometer ComparisonDocumento1 páginaBrochure Ergometer Comparisontkthird siaminterAinda não há avaliações
- User Guide For Gateway NV57H / NV55SDocumento1.087 páginasUser Guide For Gateway NV57H / NV55SAudrey D. ChatmanAinda não há avaliações
- 01 Rude DoctypeDocumento215 páginas01 Rude DoctypeChristal Rae Tac-anAinda não há avaliações
- Euref2 English PDFDocumento10 páginasEuref2 English PDFbasileusbyzantiumAinda não há avaliações
- Sileo Katalog S12 enDocumento2 páginasSileo Katalog S12 enMirceaAinda não há avaliações
- Assignment Fall2018Documento2 páginasAssignment Fall2018Frans LoekitoAinda não há avaliações
- Muh Eng 50hzDocumento8 páginasMuh Eng 50hzaleks canjugaAinda não há avaliações
- Design and analyze a non-inverting op-amp circuit with gain of 10Documento7 páginasDesign and analyze a non-inverting op-amp circuit with gain of 10Mandeep KaloniaAinda não há avaliações
- Wall-Mounting Speakers EN 54Documento5 páginasWall-Mounting Speakers EN 54Mauricio Yañez PolloniAinda não há avaliações
- LbiDocumento13 páginasLbiAac AacAinda não há avaliações
- C.6 Time-Domain EM MethodsDocumento20 páginasC.6 Time-Domain EM MethodsRickyRiccardoAinda não há avaliações
- Huarui Technologies Co.,Ltd VipDocumento19 páginasHuarui Technologies Co.,Ltd Vipdrfaizal01Ainda não há avaliações
- Contoh Spoof TextDocumento7 páginasContoh Spoof TextIndrayaniAinda não há avaliações
- Lab Report 11Documento6 páginasLab Report 11James Lemuel MallapreAinda não há avaliações
- Korea Battery Product Catalogue 2023Documento8 páginasKorea Battery Product Catalogue 2023Cesar GarciaAinda não há avaliações
- InvoicedfgvnhbjnmDocumento1 páginaInvoicedfgvnhbjnmJay VayedaAinda não há avaliações
- Wireless Sensor Network Using Zigbee: Nidhi Patel, Hiren Kathiriya, Arjav BavarvaDocumento5 páginasWireless Sensor Network Using Zigbee: Nidhi Patel, Hiren Kathiriya, Arjav BavarvaDavidleonardo GalindoAinda não há avaliações
- Cing - Common Interface For NMR Structure Generation: Results 1 - 10 of 978Documento3 páginasCing - Common Interface For NMR Structure Generation: Results 1 - 10 of 978Judap FlocAinda não há avaliações