Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
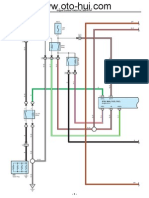
- Wiring Diagram ECU 2KD-FTVDocumento13 páginasWiring Diagram ECU 2KD-FTVDam Nguyen88% (96)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Diesel Engines For Vehicles D2066 D2676Documento6 páginasDiesel Engines For Vehicles D2066 D2676Branislava Savic63% (16)
- DTS Monaco Info PDFDocumento4 páginasDTS Monaco Info PDFStephensonAinda não há avaliações
- Mercedes Axor Fuel System Repair ManualDocumento20 páginasMercedes Axor Fuel System Repair ManualStephenson75% (4)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- TCUDocumento9 páginasTCUStephensonAinda não há avaliações
- Softing DTS Monaco Data SheetDocumento4 páginasSofting DTS Monaco Data SheetStephensonAinda não há avaliações
- CAESAR HW Implementers Guide v1.1Documento42 páginasCAESAR HW Implementers Guide v1.1StephensonAinda não há avaliações
- S60me C8 - 2 Gi PDFDocumento413 páginasS60me C8 - 2 Gi PDFStephenson100% (2)
- Double Coin Dual Spacing InfoSheetDocumento2 páginasDouble Coin Dual Spacing InfoSheetStephensonAinda não há avaliações
- Commercial Vehicle Regulations 2018Documento15 páginasCommercial Vehicle Regulations 2018StephensonAinda não há avaliações
- Iecex Ul 14 0012x Issue 0Documento3 páginasIecex Ul 14 0012x Issue 0StephensonAinda não há avaliações
- SD Connect MultiplexerDocumento7 páginasSD Connect MultiplexerStephenson100% (2)
- TSL Pro Install T InfoDocumento12 páginasTSL Pro Install T InfoStephensonAinda não há avaliações
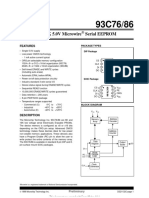
- 8K/16K 5.0V Microwire Serial EEPROM: FeaturesDocumento12 páginas8K/16K 5.0V Microwire Serial EEPROM: FeaturesStephensonAinda não há avaliações
- VVDI Prog Programmer V4.5.8 User ManualDocumento52 páginasVVDI Prog Programmer V4.5.8 User Manualobd365Ainda não há avaliações
- High Pressure System PumpDocumento2 páginasHigh Pressure System PumpStephensonAinda não há avaliações
- CANoe - Diva FactSheet enDocumento2 páginasCANoe - Diva FactSheet enStephensonAinda não há avaliações
- Xentry Kit SDDocumento7 páginasXentry Kit SDStephenson100% (1)
- ASAM MCD (Association For Standardisation of Automation and Measuring Systems, MCD)Documento30 páginasASAM MCD (Association For Standardisation of Automation and Measuring Systems, MCD)StephensonAinda não há avaliações
- Wirelesss TelematicsDocumento2 páginasWirelesss TelematicsStephensonAinda não há avaliações
- Sdconnect Multiplerxer Hand BookDocumento35 páginasSdconnect Multiplerxer Hand BookStephenson100% (3)
- BMW E46 Traction Control SystemDocumento47 páginasBMW E46 Traction Control SystemStephensonAinda não há avaliações
- T.E. - AI - ML SyllabusDocumento76 páginasT.E. - AI - ML SyllabusSunita KumawatAinda não há avaliações
- Systems Network Architecture (SNA)Documento23 páginasSystems Network Architecture (SNA)Sean Matthew L. Ocampo0% (1)
- Integration of SystemsDocumento16 páginasIntegration of SystemsradhikaAinda não há avaliações
- T-Rec-Q 931-199805-I!!pdf-EDocumento345 páginasT-Rec-Q 931-199805-I!!pdf-ECris MonsantoAinda não há avaliações
- E-Commerce Infrastructure: The Internet, Web and Mobile PlatformDocumento52 páginasE-Commerce Infrastructure: The Internet, Web and Mobile PlatformMoti DiroAinda não há avaliações
- Kostal Interface Modbus (TCP) & Sunspec: Piko Iq / Plenticore PlusDocumento21 páginasKostal Interface Modbus (TCP) & Sunspec: Piko Iq / Plenticore PlusKharisma MuhammadAinda não há avaliações
- COMP140 Syllabus 05 - 01 - 2022Documento10 páginasCOMP140 Syllabus 05 - 01 - 2022aksAinda não há avaliações
- All Rights ReservedDocumento295 páginasAll Rights ReservedRoy LeongAinda não há avaliações
- CN MidDocumento83 páginasCN MidNimishaAinda não há avaliações
- Final TEIT Syllabus 2012 Course 04.06.2014Documento52 páginasFinal TEIT Syllabus 2012 Course 04.06.2014Bhushan ChaudhariAinda não há avaliações
- Unitrans ZXONM E300 (V3.17) Installation ManualDocumento115 páginasUnitrans ZXONM E300 (V3.17) Installation Manualluis_choquehuanca100% (4)
- Fundamentals of Internet and Web Technologies Ver1Documento44 páginasFundamentals of Internet and Web Technologies Ver1Sulojan VipulAinda não há avaliações
- CCNA - Module 3Documento58 páginasCCNA - Module 3amr ehabAinda não há avaliações
- Concepts For 5g Mobile NetworksDocumento4 páginasConcepts For 5g Mobile NetworksAbhilasha RevurAinda não há avaliações
- 15it303j Unit 1Documento112 páginas15it303j Unit 1Jayarami Reddy VAinda não há avaliações
- Jimma University: Jimma Institute of TechnologyDocumento5 páginasJimma University: Jimma Institute of TechnologyGenene GebreAinda não há avaliações
- CCNA1 M2 Networking FundamentalsDocumento28 páginasCCNA1 M2 Networking FundamentalsAko Si NonongAinda não há avaliações
- Digital Communication and Computer Networking Lab ManualDocumento66 páginasDigital Communication and Computer Networking Lab ManualJoey TribianniAinda não há avaliações
- Aiml Virtual InternshipDocumento21 páginasAiml Virtual InternshipPainampuram JuhithaAinda não há avaliações
- T101 - GTW T101 - 14jan04 - VZDocumento247 páginasT101 - GTW T101 - 14jan04 - VZCosmin TomaAinda não há avaliações
- CNS-ST3.1Documento17 páginasCNS-ST3.1Achilles AldaveAinda não há avaliações
- (CCNA) 2.application Layer FunctionalitDocumento27 páginas(CCNA) 2.application Layer FunctionalitLuis GonzalezAinda não há avaliações
- Module 15: Application Layer: Introduction To Networks v7.0 (ITN)Documento35 páginasModule 15: Application Layer: Introduction To Networks v7.0 (ITN)thanh vienAinda não há avaliações
- MAC Layer Protocols For Internet of Things A SurveDocumento42 páginasMAC Layer Protocols For Internet of Things A SurveManoj KumarAinda não há avaliações
- AUTOSAR TR ReleaseOverviewAndRevHistoryDocumento49 páginasAUTOSAR TR ReleaseOverviewAndRevHistorySiddu Shiva KadiwalAinda não há avaliações
- 201-300 310330500-2016-New-N10-006-Exam-Dumps-For-Free-VCE-and-PDF-201-300Documento44 páginas201-300 310330500-2016-New-N10-006-Exam-Dumps-For-Free-VCE-and-PDF-201-300bakos10Ainda não há avaliações
- Apple TalkDocumento22 páginasApple Talkalynutzza900% (1)
- ProxiesDocumento5 páginasProxiesHafsi NawfelAinda não há avaliações
- IoT Based Monitoring Andcontrol For Energy Management System ThesisDocumento71 páginasIoT Based Monitoring Andcontrol For Energy Management System Thesisnazar azizAinda não há avaliações
- cs132 Midterm Sol KedDocumento5 páginascs132 Midterm Sol KedDev JoshiAinda não há avaliações