Você também pode gostar
- Flip Flop Informe 4 Circuitos Electrónicos IIDocumento13 páginasFlip Flop Informe 4 Circuitos Electrónicos IIDavid IturriagaAinda não há avaliações
- FUENTE de ALIMENTACION Regula de 30v Terminado para ImprimirDocumento9 páginasFUENTE de ALIMENTACION Regula de 30v Terminado para ImprimirJuan CarlosAinda não há avaliações
- CONVERSIÓN DE UN NÚMERO BINARIO DE 5 BITS A BCD PARA MOSTRAR EN 2 DISPLAYS 7 SegmentosDocumento15 páginasCONVERSIÓN DE UN NÚMERO BINARIO DE 5 BITS A BCD PARA MOSTRAR EN 2 DISPLAYS 7 Segmentosprofeitm100% (3)
- Acopladores Direccionales - Anillo HibridoDocumento20 páginasAcopladores Direccionales - Anillo HibridoPAPOFULEAinda não há avaliações
- Latches 100209091220 Phpapp02Documento9 páginasLatches 100209091220 Phpapp02Cläü SäläsAinda não há avaliações
- Prac 27Documento7 páginasPrac 27Yall GlezAinda não há avaliações
- Modelo Robot BalancinDocumento8 páginasModelo Robot BalancinKevin E. Godinez OrtizAinda não há avaliações
- 11.1 Guia PrácticaDocumento13 páginas11.1 Guia PrácticaJimenaAlexandraAroniPazAinda não há avaliações
- Proyecto Circuito Contador AutomaticoDocumento4 páginasProyecto Circuito Contador AutomaticoSantiago Xavier Yepez LeitonAinda não há avaliações
- EPC Manual de UsuarioDocumento81 páginasEPC Manual de UsuarioDeisy GuanochangaAinda não há avaliações
- Sistema de Riego AutomaticoDocumento7 páginasSistema de Riego AutomaticoJoel Erico Escobar SalaAinda não há avaliações
- Guía de ejercicios de flip flopsDocumento2 páginasGuía de ejercicios de flip flopsAlejandra J.Ainda não há avaliações
- Informe Final ContadoresDocumento9 páginasInforme Final ContadoresBrayan TGAinda não há avaliações
- Sistemas Electricos de Potencia Ejercicios y Problemas Resueltos PDFDocumento4 páginasSistemas Electricos de Potencia Ejercicios y Problemas Resueltos PDFbrunoAinda não há avaliações
- Manual Electronica IIDocumento71 páginasManual Electronica IIJorge Guadalupe Alonso GarciaAinda não há avaliações
- Alu 74181Documento9 páginasAlu 74181Franck JonhsonAinda não há avaliações
- Labvolt GuiaDocumento6 páginasLabvolt GuiaWilsonAinda não há avaliações
- Seguidor de Linea AnalogicoDocumento9 páginasSeguidor de Linea AnalogicoGeova Gomez50% (2)
- Amplificadores: Sistemas de Ecuaciones DiferencialesDocumento10 páginasAmplificadores: Sistemas de Ecuaciones DiferencialesJoan JoseAinda não há avaliações
- Proyecto CafeteraDocumento10 páginasProyecto Cafeteraeliseo rodea100% (2)
- Resumen DLD HansDocumento135 páginasResumen DLD HansAlba ChaparroAinda não há avaliações
- Primer Parcial Electronica DigitalDocumento2 páginasPrimer Parcial Electronica DigitalDiego CardenasAinda não há avaliações
- 5 10 19 24 MecanismosDocumento4 páginas5 10 19 24 Mecanismoshector ortizAinda não há avaliações
- Compuertas Logicas Con TransistoresDocumento10 páginasCompuertas Logicas Con TransistoresGabriela XocaAinda não há avaliações
- Deber InstrumentacionDocumento8 páginasDeber InstrumentacionRobin ChiluisaAinda não há avaliações
- Guía de Práctica #01 - UcDocumento2 páginasGuía de Práctica #01 - UcJOSUE MARSHALL TINOCO VILLAAinda não há avaliações
- Diseno AscensorDocumento23 páginasDiseno AscensorRosa AngelicaAinda não há avaliações
- Actividades Control de ProcesosDocumento26 páginasActividades Control de ProcesosDaniel PalaciosAinda não há avaliações
- Ejercicio Resuelto PicDocumento2 páginasEjercicio Resuelto PicRaul Julian Roque0% (1)
- Contadores digitales laboratorio San MarcosDocumento8 páginasContadores digitales laboratorio San MarcosJhulian VillafuerteAinda não há avaliações
- Electrónica de Potencia-Unidad 2-Gonzalez Zapata Luis Jesus.Documento30 páginasElectrónica de Potencia-Unidad 2-Gonzalez Zapata Luis Jesus.LuisJesusGonzalezZapata100% (1)
- Solucionario Introduccion Al Analisis de Circuitos BoylestadDocumento4 páginasSolucionario Introduccion Al Analisis de Circuitos BoylestadJesus Gonzalez Garcia100% (1)
- LABORATORIO ElectroneumaticaDocumento8 páginasLABORATORIO ElectroneumaticaLEIRBAGVAMP100% (1)
- Laboratorio N°6 - Flip FlopDocumento18 páginasLaboratorio N°6 - Flip FlopJasser CahuiAinda não há avaliações
- Control cosenoidal con rectificador monofásicoDocumento6 páginasControl cosenoidal con rectificador monofásicoStalin NarvaezAinda não há avaliações
- Control de Velocidad de Un Motor DC en Lazo AbiertoDocumento9 páginasControl de Velocidad de Un Motor DC en Lazo AbiertoSergio Ponce de LeónAinda não há avaliações
- Clase 3Documento7 páginasClase 3Iván CrespoAinda não há avaliações
- Diseño de automatismos con GrafcetDocumento57 páginasDiseño de automatismos con GrafcetHectorSandovalAinda não há avaliações
- Sumador Restador 8 BitsDocumento9 páginasSumador Restador 8 BitsMaria Alejandra Cardozo Guzman0% (1)
- Fourier Media OndaDocumento6 páginasFourier Media OndaLucy LunaAinda não há avaliações
- C1 Contador de RizoDocumento4 páginasC1 Contador de RizoGarcía Román Itzel JocelynAinda não há avaliações
- Sistemas de Control Digital Laplace AsteriscoDocumento28 páginasSistemas de Control Digital Laplace AsteriscoPedro CarmonaAinda não há avaliações
- Practica 1 Latch SRDocumento10 páginasPractica 1 Latch SRBrandon Vargas ChicoAinda não há avaliações
- Diseño de Sumador, Integrador, Derivador y Restador Con Amplificadores OperacionalesDocumento2 páginasDiseño de Sumador, Integrador, Derivador y Restador Con Amplificadores OperacionalesGeral SchuakosviAinda não há avaliações
- Contador JohnsonDocumento7 páginasContador JohnsonNelson Pato Suárez0% (1)
- Tarea SemaforoDocumento1 páginaTarea SemaforoCristian CascoAinda não há avaliações
- Memoria SRAM Universidad Nacional Mayor de San MarcosDocumento23 páginasMemoria SRAM Universidad Nacional Mayor de San MarcosErick Renzo100% (1)
- Laboratorio OTADocumento6 páginasLaboratorio OTAJuan Carlos PintoAinda não há avaliações
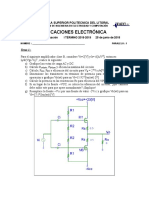
- Aplicaciones Electrónica: Títulos de los 12 TemasDocumento13 páginasAplicaciones Electrónica: Títulos de los 12 TemasDouglas Daniel Pincay QuimiAinda não há avaliações
- Tres Salidas PDFDocumento5 páginasTres Salidas PDFMariaAinda não há avaliações
- Imprimir MicroDocumento10 páginasImprimir MicrorogerAinda não há avaliações
- Problemas Seminario Examen Final - 2020 - 2Documento6 páginasProblemas Seminario Examen Final - 2020 - 2ronaldAinda não há avaliações
- Practicas de LogosDocumento12 páginasPracticas de LogosAnonymous bOIMMMAinda não há avaliações
- PLC - Ejercicios de Programación - Semestre IV - 2017 - 10Documento21 páginasPLC - Ejercicios de Programación - Semestre IV - 2017 - 10Victor Manuel Vicman Mogollon ChavezAinda não há avaliações
- PLC - Ejercicios de Programación - Semestre IV - 2017 - 10Documento21 páginasPLC - Ejercicios de Programación - Semestre IV - 2017 - 10luisAinda não há avaliações
- Ejercicio de GrafcetDocumento5 páginasEjercicio de GrafcetManuelGamers33Ainda não há avaliações
- Ejercicios de AutomatizacionDocumento16 páginasEjercicios de AutomatizacionJhonatan Lopez MitaccAinda não há avaliações
- Circuitos ElectricosDocumento17 páginasCircuitos ElectricosMaritza Ccencho FalconAinda não há avaliações
- Ejercicios Logosoft Comfort V8.3Documento9 páginasEjercicios Logosoft Comfort V8.3CarlosAinda não há avaliações
- Problema Resuelto FSMDocumento9 páginasProblema Resuelto FSMLuis Ayasta PortocarreroAinda não há avaliações
- Linea y Nivel de InvestigacionDocumento26 páginasLinea y Nivel de InvestigacionjorgeAinda não há avaliações
- Landeo FernandezDocumento69 páginasLandeo FernandezKike AlfAinda não há avaliações
- Modulo01 Ejercicio05RDocumento3 páginasModulo01 Ejercicio05RjorgeAinda não há avaliações
- Modulo01 Ejercicio04Documento1 páginaModulo01 Ejercicio04jorgeAinda não há avaliações
- Modulo01 Ejercicio01Documento1 páginaModulo01 Ejercicio01jorgeAinda não há avaliações
- Extra GasesDocumento3 páginasExtra GasesCristhian BrowmAinda não há avaliações
- Modulo01 Ejercicio01Documento1 páginaModulo01 Ejercicio01jorgeAinda não há avaliações
- tECNICA DE MODELADO PDFDocumento39 páginastECNICA DE MODELADO PDFJB StrahlAinda não há avaliações
- Modulo01 Ejercicio03Documento1 páginaModulo01 Ejercicio03jorgeAinda não há avaliações
- Juice ExtractorDocumento16 páginasJuice ExtractorjorgeAinda não há avaliações
- Modulo01 Ejercicio02Documento1 páginaModulo01 Ejercicio02jorgeAinda não há avaliações
- Curso Termodinamica CompDocumento355 páginasCurso Termodinamica CompGiancarlo Lazaro Cruz100% (3)
- Diseño de Un Trapiche Accionado Mediante Energía Hidraúlica para Uso en Fincasproductoras de Caña PDFDocumento239 páginasDiseño de Un Trapiche Accionado Mediante Energía Hidraúlica para Uso en Fincasproductoras de Caña PDFjorgeAinda não há avaliações
- Molino de caña higiénicoDocumento207 páginasMolino de caña higiénicoDavid Acosta100% (1)
- Letras Cannibal CorpseDocumento6 páginasLetras Cannibal CorpsejorgeAinda não há avaliações
- Normas PDFDocumento12 páginasNormas PDFjorgeAinda não há avaliações
- Linea y Nivel de InvestigacionDocumento26 páginasLinea y Nivel de InvestigacionjorgeAinda não há avaliações
- Anexo Practica6Documento5 páginasAnexo Practica6Lucero Flores SalinasAinda não há avaliações
- AzucaresDocumento9 páginasAzucaresAlejandro Gutierrez GonzalezAinda não há avaliações
- Guia para Ganar Dota UnoDocumento2 páginasGuia para Ganar Dota UnojorgeAinda não há avaliações
- HowoDocumento6 páginasHowojorgeAinda não há avaliações
- DeidiceDocumento2 páginasDeidicejorgeAinda não há avaliações
- Bases Legales de Pedir LlantasDocumento13 páginasBases Legales de Pedir LlantasjorgeAinda não há avaliações
- Modelo Operativo TRIBOLOGIADocumento24 páginasModelo Operativo TRIBOLOGIAjorgeAinda não há avaliações
- El TrabajoDocumento5 páginasEl TrabajoSayra Séptimo ZaragozaAinda não há avaliações
- El TrabajoDocumento5 páginasEl TrabajoSayra Séptimo ZaragozaAinda não há avaliações
- Deicide BiografiaDocumento3 páginasDeicide BiografiajorgeAinda não há avaliações
- Encad Hacia AtrasDocumento53 páginasEncad Hacia AtrasjorgeAinda não há avaliações
- La Planificación SODocumento23 páginasLa Planificación SOjorgeAinda não há avaliações
- C&A MS-03L, Microscopio Óptico, Ficha TécnicaDocumento2 páginasC&A MS-03L, Microscopio Óptico, Ficha TécnicaTICTRONICA Ltda.Ainda não há avaliações
- Módulo+completo Lógica+MatemáticaDocumento89 páginasMódulo+completo Lógica+MatemáticaFelix David Paternina EscobarAinda não há avaliações
- Fìsica 5toDocumento2 páginasFìsica 5toIan J. De La Cruz Velasco100% (1)
- Plan Microondas 2017-2018Documento12 páginasPlan Microondas 2017-2018Lili RiveraAinda não há avaliações
- Retorno: Niveles y BalanceoDocumento52 páginasRetorno: Niveles y BalanceoJose Guillermo Salvador AspajoAinda não há avaliações
- Introduccion TermofluidosDocumento68 páginasIntroduccion TermofluidosGabriel Lopez BarajasAinda não há avaliações
- Silabo de Matemáticas para La Ingeniería I. Ing. AgroindustrialDocumento12 páginasSilabo de Matemáticas para La Ingeniería I. Ing. AgroindustrialJuan Eloy BonillaAinda não há avaliações
- Tema 08 - Leyes de La HidrodinámicaDocumento39 páginasTema 08 - Leyes de La HidrodinámicaARIUS ALEXANDER MIJAHUANCA BARBOZAAinda não há avaliações
- Programa Mecánica de Fluidos USACDocumento5 páginasPrograma Mecánica de Fluidos USACChristine LawrenceAinda não há avaliações
- Formas Farmaceuticas DIGEMIDDocumento9 páginasFormas Farmaceuticas DIGEMIDmanuelAinda não há avaliações
- Historia de La Tabla PeriódicaDocumento6 páginasHistoria de La Tabla PeriódicaCalixtro SantosAinda não há avaliações
- Producto Academico N-1Documento9 páginasProducto Academico N-1Líber Yohan AngelAinda não há avaliações
- Definicion y Principios Basicos Mantenimiento Predictivo TripticoDocumento3 páginasDefinicion y Principios Basicos Mantenimiento Predictivo TripticoYarela Nll'cAinda não há avaliações
- Matematicas CemaDocumento2 páginasMatematicas CemaGerson SisAinda não há avaliações
- Rayos X en OdontologíaDocumento104 páginasRayos X en OdontologíaAlexandra Pinzón Ortodoncista100% (1)
- Sistema de Control de Lazo Abierto y Lazo CerradoDocumento6 páginasSistema de Control de Lazo Abierto y Lazo CerradoAnonymous SghVMpAinda não há avaliações
- Equivalente Eléctrico Del CalorDocumento4 páginasEquivalente Eléctrico Del Calorjefry sierraAinda não há avaliações
- Balonmano Perfeccinamiento J.L.ANTONDocumento26 páginasBalonmano Perfeccinamiento J.L.ANTONJordi Cañadas Lopez100% (1)
- Te MarioDocumento2 páginasTe MarioalonsoAinda não há avaliações
- 08.01. Informe Del PavimentoDocumento7 páginas08.01. Informe Del PavimentoAdert Tarqui QuenayaAinda não há avaliações
- El Teorema de SilverDocumento10 páginasEl Teorema de SilverGenny Paola Ardila HernándezAinda não há avaliações
- Guia de Ejercitacion de Cinematic ADocumento7 páginasGuia de Ejercitacion de Cinematic Aantonella_reineroAinda não há avaliações
- Curso Molienda MaízDocumento63 páginasCurso Molienda Maízvladerdat100% (1)
- Ensayo Numeros IndicesDocumento4 páginasEnsayo Numeros IndicesLiz LainezAinda não há avaliações
- Grados BaumeDocumento6 páginasGrados BaumeManuel Ernesto Rubiano CepedaAinda não há avaliações
- Reporte de calibración de chancadoras hidrocónicasDocumento4 páginasReporte de calibración de chancadoras hidrocónicasHomer Edy Armas CalixtoAinda não há avaliações
- Probabilidad y Estadistica UAMDocumento31 páginasProbabilidad y Estadistica UAMCarlos Ramses Vergel ZapienAinda não há avaliações
- Instrumentos de química inorgánicaDocumento8 páginasInstrumentos de química inorgánicaSergio CocAinda não há avaliações
- Hdpe y Bridas de Gran DiametroDocumento20 páginasHdpe y Bridas de Gran DiametroDavid AlejandroAinda não há avaliações
- Informe Proyecto Robot MecánicoDocumento26 páginasInforme Proyecto Robot MecánicoLeslyAinda não há avaliações