Você também pode gostar
- KXM 52Documento3 páginasKXM 52April MurphyAinda não há avaliações
- MicroESystems LDL C DataSheetDocumento5 páginasMicroESystems LDL C DataSheetElectromateAinda não há avaliações
- Ti235 Encoder AbsolutoDocumento12 páginasTi235 Encoder AbsolutoJairo LugoAinda não há avaliações
- On-Chip Electro-Static Discharge (ESD) Protection for Radio-Frequency Integrated CircuitsNo EverandOn-Chip Electro-Static Discharge (ESD) Protection for Radio-Frequency Integrated CircuitsAinda não há avaliações
- Ad9288bst 100Documento17 páginasAd9288bst 100negrea_c8079Ainda não há avaliações
- AD22300, AD22301, AD22302: 3.3V Single and Dual Axis Automotive iMEMS AccelerometersDocumento5 páginasAD22300, AD22301, AD22302: 3.3V Single and Dual Axis Automotive iMEMS AccelerometersHugo D. Alvarez100% (1)
- ADXL210Documento11 páginasADXL210JaehyupKimAinda não há avaliações
- Adxl 278Documento12 páginasAdxl 278Dav1t1Ainda não há avaliações
- ACPL C87B ACPL C87A ACPL C870 Precision Optically Isolated Voltage SensorDocumento14 páginasACPL C87B ACPL C87A ACPL C870 Precision Optically Isolated Voltage SensorlavaAinda não há avaliações
- Smart Subcombiner US CEDocumento2 páginasSmart Subcombiner US CEtalasubhanojiraogmaiAinda não há avaliações
- Finest 113 enDocumento3 páginasFinest 113 encavcicAinda não há avaliações
- Hall Effect at S 682 LSHDocumento16 páginasHall Effect at S 682 LSHMichael IrvineAinda não há avaliações
- Applications: 836.5 MHZ Saw FilterDocumento6 páginasApplications: 836.5 MHZ Saw Filterahmad104Ainda não há avaliações
- Low Cost 1.2 G Dual Axis Accelerometer ADXL213: Features General DescriptionDocumento13 páginasLow Cost 1.2 G Dual Axis Accelerometer ADXL213: Features General DescriptionJose Adolfo Monteverde SalazarAinda não há avaliações
- High Performance, Wide Bandwidth Accelerometer ADXL001: FeaturesDocumento16 páginasHigh Performance, Wide Bandwidth Accelerometer ADXL001: FeaturesMago ChinesAinda não há avaliações
- Ferrite Chip Inductors - 0805AF (2012)Documento2 páginasFerrite Chip Inductors - 0805AF (2012)TestronicpartsAinda não há avaliações
- Analog Devices Welcomes Hittite Microwave Corporation: No Content On The Attached Document Has ChangedDocumento10 páginasAnalog Devices Welcomes Hittite Microwave Corporation: No Content On The Attached Document Has ChangedLê Đình TiếnAinda não há avaliações
- HS-1840ARH: Rad-Hard 16 Channel CMOS Analog Multiplexer With High-Z Analog Input Protection FeaturesDocumento7 páginasHS-1840ARH: Rad-Hard 16 Channel CMOS Analog Multiplexer With High-Z Analog Input Protection FeaturesDeepa DevarajAinda não há avaliações
- ZMD310AT - Tehnički PodaciDocumento6 páginasZMD310AT - Tehnički Podaciroadkill7Ainda não há avaliações
- At 110 PinDocumento3 páginasAt 110 PinVinod DawraAinda não há avaliações
- Automotive Inertial ModuleDocumento10 páginasAutomotive Inertial ModuledcesentherAinda não há avaliações
- Product Catalogue Differential Pressure TransmitterDocumento28 páginasProduct Catalogue Differential Pressure Transmitterprasana balajiAinda não há avaliações
- Monolithic Amplifi Er: Dc-6 GHZDocumento4 páginasMonolithic Amplifi Er: Dc-6 GHZy_abd89Ainda não há avaliações
- AT-1110 v3Documento4 páginasAT-1110 v3IvanAinda não há avaliações
- D D D D D D D D: DescriptionDocumento10 páginasD D D D D D D D: DescriptionVíctor LópezAinda não há avaliações
- dg408 PDFDocumento19 páginasdg408 PDFRoozbeh BahmanyarAinda não há avaliações
- Jumper Cable PDFDocumento4 páginasJumper Cable PDFiAZHTON100% (1)
- 7sg17 Rho 3 Catalogue SheetDocumento10 páginas7sg17 Rho 3 Catalogue SheetRajesh ChunduruAinda não há avaliações
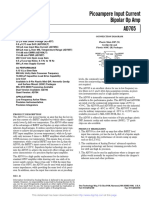
- AD705JDocumento8 páginasAD705JJorge Andrés GarcíaAinda não há avaliações
- CG3 DG3Documento5 páginasCG3 DG3Jorge Rene GerardoAinda não há avaliações
- MS8000.D / Single Axis Analog Accelerometer: EnergyDocumento5 páginasMS8000.D / Single Axis Analog Accelerometer: EnergyDhaneesh ChandranAinda não há avaliações
- Hi 7190Documento25 páginasHi 7190ejoaomelchiorsAinda não há avaliações
- Manual de BristolDocumento16 páginasManual de BristolChristian Flores LozanoAinda não há avaliações
- LC08-098-XXX: Technical Data Sheet Cable Assembly N Male / N MaleDocumento2 páginasLC08-098-XXX: Technical Data Sheet Cable Assembly N Male / N MaleLão ChuAinda não há avaliações
- Strain GaugesDocumento20 páginasStrain GaugesDragan LazicAinda não há avaliações
- F FL LO OW W: Vampire - Electronic IndicatorDocumento3 páginasF FL LO OW W: Vampire - Electronic IndicatorscribdkhatnAinda não há avaliações
- AD7814Documento8 páginasAD7814nevdullAinda não há avaliações
- SIMATIC S7 S7-1200 Programmable Controller - SM 1231 RTDDocumento4 páginasSIMATIC S7 S7-1200 Programmable Controller - SM 1231 RTDLeon S. KennedyAinda não há avaliações
- MJS 065R17BVDocumento2 páginasMJS 065R17BVBismarck Pablo Ibañez PiottiAinda não há avaliações
- 2 N 5952Documento3 páginas2 N 5952bahimetAinda não há avaliações
- HC14Documento10 páginasHC14Bruno NascimentoAinda não há avaliações
- ABB Instrumentation: 600T Series TransmittersDocumento10 páginasABB Instrumentation: 600T Series Transmittersalbert_ben13Ainda não há avaliações
- LFSPXO025165 ReelDocumento2 páginasLFSPXO025165 Reelhanifmohammed85Ainda não há avaliações
- BlueOptics BO75J27210D 10GBASE-BX-U X2 Transceiver TX1270nm-RX1330 10 Kilometer Singlemode SC-Simplex 10 GigabitDocumento9 páginasBlueOptics BO75J27210D 10GBASE-BX-U X2 Transceiver TX1270nm-RX1330 10 Kilometer Singlemode SC-Simplex 10 GigabitCBO GmbHAinda não há avaliações
- ACS712 DatasheetDocumento15 páginasACS712 DatasheetHernan PorriniAinda não há avaliações
- Datasheet Gps Clock Tcg01eDocumento3 páginasDatasheet Gps Clock Tcg01esbmajor1970Ainda não há avaliações
- ABB ACS550 Drives CatalogueDocumento16 páginasABB ACS550 Drives CatalogueAnonymous hXUhpe7S100% (1)
- 1R0Documento3 páginas1R0Carlos Zambrano MirandaAinda não há avaliações
- LG 60PY3DF Service ManualDocumento60 páginasLG 60PY3DF Service ManualtvrepairzoneAinda não há avaliações
- DS13 Series SSRDocumento4 páginasDS13 Series SSRdanieltorniAinda não há avaliações
- 1Mx8 8Mb Asynchronous SRAMDocumento11 páginas1Mx8 8Mb Asynchronous SRAMprasanna_npAinda não há avaliações
- Odp-065r14bv - 17KV DS 0-0-0Documento1 páginaOdp-065r14bv - 17KV DS 0-0-0riskdacvAinda não há avaliações
- 6120 Case SeismicDocumento5 páginas6120 Case Seismicerwin hpAinda não há avaliações
- Relay 736: Technical DataDocumento3 páginasRelay 736: Technical DataachuthkumarAinda não há avaliações
- Energy Meter SecureDocumento6 páginasEnergy Meter SecureKarthikAinda não há avaliações
- Endevco 7270AM6Documento2 páginasEndevco 7270AM6DizzixxAinda não há avaliações
- Vibration Meter IRD811DDocumento3 páginasVibration Meter IRD811DNasir RamzanAinda não há avaliações
- User Manual: Rev. V1.0Documento120 páginasUser Manual: Rev. V1.0Lord_JoelAinda não há avaliações
- Autodesk Moldflow Course OutlineDocumento2 páginasAutodesk Moldflow Course OutlineLord_JoelAinda não há avaliações
- Hi3798M V200 Data Sheet 01-General InformationDocumento52 páginasHi3798M V200 Data Sheet 01-General InformationLord_JoelAinda não há avaliações
- Lepton Engineering Datasheet Without RadiometryDocumento62 páginasLepton Engineering Datasheet Without RadiometryLord_JoelAinda não há avaliações
- Dolby Atmos Enabled Elite Concentric Floorstanding Speakers Designed by Andrew JonesDocumento1 páginaDolby Atmos Enabled Elite Concentric Floorstanding Speakers Designed by Andrew JonesLord_JoelAinda não há avaliações
- Space Based Solar PowerDocumento18 páginasSpace Based Solar PowerLord_JoelAinda não há avaliações
- Pixelplus-Pc1030n C11168Documento96 páginasPixelplus-Pc1030n C11168Lord_Joel100% (1)
- Cnrfgwa-418: 418Mhz 1-Way RF GatewayDocumento2 páginasCnrfgwa-418: 418Mhz 1-Way RF GatewayLord_JoelAinda não há avaliações
- I-Cybie Quick Start GuideDocumento2 páginasI-Cybie Quick Start GuideLord_JoelAinda não há avaliações
- PC1030DDocumento22 páginasPC1030DLord_JoelAinda não há avaliações
- MemristorsDocumento26 páginasMemristorsLord_JoelAinda não há avaliações
- Manual Nexstar RCDocumento27 páginasManual Nexstar RCLord_JoelAinda não há avaliações
- Mizu Not Hydrogen EvDocumento6 páginasMizu Not Hydrogen EvLord_JoelAinda não há avaliações
- IRFB3206 Mosfet 30A Solar Charge ControllerDocumento12 páginasIRFB3206 Mosfet 30A Solar Charge ControllerLord_JoelAinda não há avaliações
- About Solar InverterDocumento25 páginasAbout Solar InverterLord_JoelAinda não há avaliações
- Grid Connect InverterDocumento9 páginasGrid Connect InverterLord_JoelAinda não há avaliações
- Power Supply 15v - 2a D YaxunDocumento1 páginaPower Supply 15v - 2a D YaxunLord_Joel0% (1)
- 178b 8 16gb 2c0f Mobile Lpddr3Documento160 páginas178b 8 16gb 2c0f Mobile Lpddr3Lord_JoelAinda não há avaliações
- cm60 cm6024z cm6048zDocumento13 páginascm60 cm6024z cm6048zLord_JoelAinda não há avaliações
- C5353 Toshiba PDFDocumento5 páginasC5353 Toshiba PDFLord_JoelAinda não há avaliações
- Robo Sapien ServerDocumento30 páginasRobo Sapien ServerLord_JoelAinda não há avaliações
- Chapter - 13 Dynamic Host Configuration Protocol (DHCP)Documento14 páginasChapter - 13 Dynamic Host Configuration Protocol (DHCP)ak.microsoft20056613Ainda não há avaliações
- TL MR3040 DatasheetDocumento2 páginasTL MR3040 DatasheetarkupiAinda não há avaliações
- 70-687 8.1 MLO Worksheet Lab 01Documento4 páginas70-687 8.1 MLO Worksheet Lab 01David Wilson100% (1)
- BabelnewDocumento98 páginasBabelnewkhannawazAinda não há avaliações
- Security+ Chapter 8 AnswersDocumento2 páginasSecurity+ Chapter 8 AnswersFrank StevensonAinda não há avaliações
- Coursera Lecture 11.1 OpenACC IntroDocumento11 páginasCoursera Lecture 11.1 OpenACC IntropopoloresAinda não há avaliações
- Community RulesrtfDocumento602 páginasCommunity Rulesrtflwdkfjlk23j4Ainda não há avaliações
- Restore Your USB Key To It's Original State - USB Pen Drive LinuxDocumento4 páginasRestore Your USB Key To It's Original State - USB Pen Drive Linuxabdallah_amaAinda não há avaliações
- DB GP30-DEMO enDocumento20 páginasDB GP30-DEMO enKupeKrisztiAinda não há avaliações
- All Config Cfa - 4 April (SfileDocumento7 páginasAll Config Cfa - 4 April (SfileRiyo ParhanAinda não há avaliações
- Đề Thi Trắc Nghiệm CCNA FullDocumento90 páginasĐề Thi Trắc Nghiệm CCNA FullTieu Ngoc LyAinda não há avaliações
- Gate Sample PaperDocumento7 páginasGate Sample Papershettyashwin19Ainda não há avaliações
- IAM DS P IAMS50-Datasheet 20180802Documento2 páginasIAM DS P IAMS50-Datasheet 20180802GilangAinda não há avaliações
- Computer ArchitectureDocumento17 páginasComputer ArchitectureKaushik CAinda não há avaliações
- Security AuditDocumento24 páginasSecurity Auditneovik82Ainda não há avaliações
- STRAP 2012 Installation GuideDocumento2 páginasSTRAP 2012 Installation GuideSalvatore ShwAinda não há avaliações
- Cse 3100 Lab 0Documento3 páginasCse 3100 Lab 0cjonAinda não há avaliações
- 5.3.2.8 Packet Tracer - Examine The ARP TableDocumento6 páginas5.3.2.8 Packet Tracer - Examine The ARP TableLuis Alberto MoretaAinda não há avaliações
- C Programming Unit 4.1 PointersDocumento33 páginasC Programming Unit 4.1 PointersrishikaAinda não há avaliações
- Compression NotesDocumento12 páginasCompression Notessenthilkumar100% (2)
- 3.2.1.7 Packet Tracer - Configuring VLANs InstructionsDocumento3 páginas3.2.1.7 Packet Tracer - Configuring VLANs InstructionsewmbtrakAinda não há avaliações
- JJJJJJJDocumento3 páginasJJJJJJJJoãoLucianiFerreiraAinda não há avaliações
- VLAN Routing: Huawei Technologies Co., LTDDocumento14 páginasVLAN Routing: Huawei Technologies Co., LTDMuhammadSarmadMahmoodMalikAinda não há avaliações
- Batch Best Practices PDFDocumento74 páginasBatch Best Practices PDFJosephine NguyenAinda não há avaliações
- Manual Informativo Titan ServerDocumento6 páginasManual Informativo Titan ServerJuan RiosAinda não há avaliações
- Gprs Tunneling Protocol LinuxDocumento3 páginasGprs Tunneling Protocol LinuxNancyAinda não há avaliações
- 54Mbps Wireless-G Router User's GuideDocumento69 páginas54Mbps Wireless-G Router User's GuideJuan Carlos CattarossiAinda não há avaliações
- MCQ - 32Documento4 páginasMCQ - 32Nida Bagoyboy Naticho100% (1)
- RTP LCDDocumento2 páginasRTP LCDjohn_freddy1Ainda não há avaliações
- Sunfire IR 092006Documento10 páginasSunfire IR 092006Eric Van NessAinda não há avaliações
- University of Chicago Press Fall 2009 Distributed TitlesNo EverandUniversity of Chicago Press Fall 2009 Distributed TitlesNota: 1 de 5 estrelas1/5 (1)