Você também pode gostar
- Appunti Di Cinematic A - Moto ParabolicoDocumento10 páginasAppunti Di Cinematic A - Moto ParabolicoantonietAinda não há avaliações
- Moto CircolareDocumento3 páginasMoto CircolareBetina KindAinda não há avaliações
- Formulario Fisica 1Documento15 páginasFormulario Fisica 1Matt Compierchio100% (1)
- Campi Vettoriali e Campi ScalariDocumento4 páginasCampi Vettoriali e Campi ScalariGBMFIER casAinda não há avaliações
- " Materiale" P: Moto Curvilineo Nello Spazio TridimensionaleDocumento8 páginas" Materiale" P: Moto Curvilineo Nello Spazio Tridimensionaleapi-251901021Ainda não há avaliações
- CINEMATICA Del Punto MaterialeDocumento7 páginasCINEMATICA Del Punto MaterialeGabriele De LucaAinda não há avaliações
- Appunti 2007 - Meccanica Razionale Per L'ingegneria MuracchiniDocumento55 páginasAppunti 2007 - Meccanica Razionale Per L'ingegneria MuracchiniLuca LatiniAinda não há avaliações
- Equazioni DinamicheDocumento12 páginasEquazioni DinamicheLucia LorenziniAinda não há avaliações
- Derivate in FisicaDocumento4 páginasDerivate in FisicaLorenzo VirgillitoAinda não há avaliações
- Fis1!0!03 Funzioni VettorialiDocumento16 páginasFis1!0!03 Funzioni VettorialiFrancesco PreteAinda não há avaliações
- Moto in Due o Tre DimensioniDocumento8 páginasMoto in Due o Tre DimensioniSimone VigoAinda não há avaliações
- Curve Nel PianoDocumento13 páginasCurve Nel PianoElhibari OthmaneAinda não há avaliações
- Formulario Fisica 1Documento15 páginasFormulario Fisica 1Davide RaimoAinda não há avaliações
- Applicazioni Della Derivata in FisicaDocumento6 páginasApplicazioni Della Derivata in FisicaLaura PecoraroAinda não há avaliações
- Nozioni Di Geometria DifferenzialeDocumento199 páginasNozioni Di Geometria DifferenzialeGiamaicoAinda não há avaliações
- Geometria e AlgebraDocumento9 páginasGeometria e AlgebraAntonio MazzilliAinda não há avaliações
- Tipi Di Moto - Fisica MecanicaDocumento3 páginasTipi Di Moto - Fisica Mecanicascoartalacur1Ainda não há avaliações
- Introduzione Ai TensoriDocumento24 páginasIntroduzione Ai TensoriPietro Neri100% (1)
- Matematica EsameDocumento5 páginasMatematica EsameFrancescaAinda não há avaliações
- CinematicaDocumento7 páginasCinematicaMarco Raneo PezzanoAinda não há avaliações
- Lezione 2 Cinematica Di Mezzi ContinuiDocumento14 páginasLezione 2 Cinematica Di Mezzi Continuiironman87Ainda não há avaliações
- Arches DesignDocumento12 páginasArches DesignStefano CorciolaniAinda não há avaliações
- Langevin PDF ProvvisorioDocumento12 páginasLangevin PDF ProvvisorioEmanuele SantonastasoAinda não há avaliações
- II-Rappresentazioni Di SistemiDocumento37 páginasII-Rappresentazioni Di SistemiCoralMCAinda não há avaliações
- Calcolo TensorialeDocumento10 páginasCalcolo TensorialezigomatteoAinda não há avaliações
- VettoriDocumento19 páginasVettoriadigaAinda não há avaliações
- Documenti Richiami Matem 13 14Documento14 páginasDocumenti Richiami Matem 13 14Federico SansoneAinda não há avaliações
- 3.cinematica 1Documento7 páginas3.cinematica 1boom shakalakaAinda não há avaliações
- 02c Cinematica3-SP - Con NoteDocumento31 páginas02c Cinematica3-SP - Con NoteRossel DiazAinda não há avaliações
- Appunti IdraulicaDocumento181 páginasAppunti IdraulicaPaolo NizzariAinda não há avaliações
- (Ebook - Fisica) Esercizi Svolti Di Fisica 1 (198Pg) PDFDocumento198 páginas(Ebook - Fisica) Esercizi Svolti Di Fisica 1 (198Pg) PDFBarbara Misani75% (4)
- Cilindri in PressioneDocumento14 páginasCilindri in PressioneMaurizio La VillettaAinda não há avaliações
- Diffeomorfismi e FlussiDocumento54 páginasDiffeomorfismi e FlussimicantenAinda não há avaliações
- Derivate N Esime Della PosizioneDocumento5 páginasDerivate N Esime Della PosizioneFederico AnneseAinda não há avaliações
- Linea ElasticaDocumento12 páginasLinea ElasticaVirgilio TinariAinda não há avaliações
- Leggi Di Conservazione in FisicaDocumento33 páginasLeggi Di Conservazione in FisicaJonny_TendezAinda não há avaliações
- LEZIONIDocumento204 páginasLEZIONIGuido Davide Dall'OlioAinda não há avaliações
- Funzione Di Corrente e Potenziale CineticoDocumento6 páginasFunzione Di Corrente e Potenziale CineticoperonimanAinda não há avaliações
- AM1Gest 15-16 AppuntiEquadiffDocumento9 páginasAM1Gest 15-16 AppuntiEquadiffFederica FortunatoAinda não há avaliações
- ElettrotecnicaDocumento65 páginasElettrotecnicaMarcoSpanòAinda não há avaliações
- IV-Rappresentazioni Nel Dominio ComplessoDocumento84 páginasIV-Rappresentazioni Nel Dominio ComplessoCoralMCAinda não há avaliações
- 2-Funzione D'onda PDFDocumento37 páginas2-Funzione D'onda PDFWicked_KnightAinda não há avaliações
- Esercizi Trasformazioni LineariDocumento2 páginasEsercizi Trasformazioni Linearialmor92Ainda não há avaliações
- 640 2277 1 PBDocumento16 páginas640 2277 1 PBxMenxAinda não há avaliações
- Calcolo TensorialeDocumento23 páginasCalcolo TensorialeArmerigoAinda não há avaliações
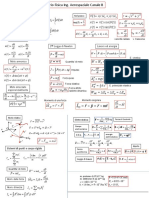
- Formulario CanalebDocumento2 páginasFormulario CanalebjjjAinda não há avaliações
- Legge Della Conservazione Della Massa (Fisica)Documento3 páginasLegge Della Conservazione Della Massa (Fisica)TommasoDominatoAinda não há avaliações
- Esercizi di matematica: geometria analitica elementareNo EverandEsercizi di matematica: geometria analitica elementareAinda não há avaliações
- Recupero Acque Piovane PDFDocumento137 páginasRecupero Acque Piovane PDFTommasoDominatoAinda não há avaliações
- Fondazioni 2Documento26 páginasFondazioni 2TommasoDominatoAinda não há avaliações
- Bacino Di CarenaggioDocumento2 páginasBacino Di CarenaggioTommasoDominatoAinda não há avaliações
- FondazioniDocumento61 páginasFondazioniEleonora MeneghelloAinda não há avaliações
- Ghisa SferoidaleDocumento5 páginasGhisa SferoidaleTommasoDominatoAinda não há avaliações
- RotatoriaDocumento118 páginasRotatoriaTommasoDominatoAinda não há avaliações
- Recupero Acque Piovane PDFDocumento137 páginasRecupero Acque Piovane PDFTommasoDominatoAinda não há avaliações
- MagroneDocumento2 páginasMagroneTommasoDominatoAinda não há avaliações
- WattoraDocumento4 páginasWattoraTommasoDominatoAinda não há avaliações
- Scala LogaritmicaDocumento12 páginasScala LogaritmicaTommasoDominatoAinda não há avaliações
- Legge Della Conservazione Della Massa (Fisica)Documento3 páginasLegge Della Conservazione Della Massa (Fisica)TommasoDominatoAinda não há avaliações
- RadianteDocumento4 páginasRadianteTommasoDominatoAinda não há avaliações
- Derivata VettoriDocumento4 páginasDerivata VettoriTommasoDominatoAinda não há avaliações
- Equazioni Differenziali A Variabili SeparabiliDocumento5 páginasEquazioni Differenziali A Variabili SeparabiliTommasoDominatoAinda não há avaliações
- Derivata VettoriDocumento4 páginasDerivata VettoriTommasoDominatoAinda não há avaliações
- Cap5 AnalisiStrutturaleBriglieDocumento86 páginasCap5 AnalisiStrutturaleBriglieTommasoDominatoAinda não há avaliações
- Briglia (Guarda) PDFDocumento3 páginasBriglia (Guarda) PDFTommasoDominatoAinda não há avaliações
- Briglia (Guarda) PDFDocumento3 páginasBriglia (Guarda) PDFTommasoDominatoAinda não há avaliações
- Danni Da Rumore UditoDocumento3 páginasDanni Da Rumore UditoTommasoDominatoAinda não há avaliações
- 9623 012Documento7 páginas9623 0121bobo83Ainda não há avaliações
- Ghisa SferoidaleDocumento5 páginasGhisa SferoidaleTommasoDominatoAinda não há avaliações
- S Part ITrafficoDocumento2 páginasS Part ITrafficoTommasoDominatoAinda não há avaliações
- Equazioni Di Navier-StokesDocumento9 páginasEquazioni Di Navier-StokesTommasoDominatoAinda não há avaliações
- Equazione Di BernoulliDocumento5 páginasEquazione Di BernoulliTommasoDominatoAinda não há avaliações
- LaTeX FacileDocumento51 páginasLaTeX FacileDiego PerroneAinda não há avaliações
- Rumore (Acustica)Documento4 páginasRumore (Acustica)TommasoDominatoAinda não há avaliações
- Danni Da Rumore UditoDocumento3 páginasDanni Da Rumore UditoTommasoDominatoAinda não há avaliações
- SuonoDocumento5 páginasSuonoTommasoDominatoAinda não há avaliações