Você também pode gostar
- 01 - 108 Series Power Units PDFDocumento8 páginas01 - 108 Series Power Units PDFMiguel PérezAinda não há avaliações
- Takako Industries, InCDocumento4 páginasTakako Industries, InCMiguel PérezAinda não há avaliações
- TMHP51 Hydraulic Servo Systems Rydberg 2008Documento46 páginasTMHP51 Hydraulic Servo Systems Rydberg 2008sherisha100% (1)
- Simmechanics TutorialDocumento19 páginasSimmechanics TutorialMiguel PérezAinda não há avaliações
- Adaptive Control Tutorial - SIAMDocumento403 páginasAdaptive Control Tutorial - SIAMCrystal Nassouri80% (5)
- Template For Preparation of Papers For IEEE Sponsored Conferences & SymposiaDocumento3 páginasTemplate For Preparation of Papers For IEEE Sponsored Conferences & SymposiaMiguel PérezAinda não há avaliações
- Motoredctorcon Encoder PDFDocumento5 páginasMotoredctorcon Encoder PDFCarlos LealAinda não há avaliações
- ADAMS Tutorial PDFDocumento316 páginasADAMS Tutorial PDFGooftilaaAniJiraachuunkooYesusiin0% (1)
- Robot 6 DofDocumento5 páginasRobot 6 DofMiguel PérezAinda não há avaliações
- Motoredctorcon Encoder PDFDocumento5 páginasMotoredctorcon Encoder PDFCarlos LealAinda não há avaliações
- AdamsDocumento3 páginasAdamsMiguel PérezAinda não há avaliações
- Cable ConferenceDocumento14 páginasCable ConferenceMiguel PérezAinda não há avaliações
- Control PD+Documento16 páginasControl PD+Miguel PérezAinda não há avaliações
- CDPRDocumento8 páginasCDPRMiguel PérezAinda não há avaliações
- DCPRsDocumento28 páginasDCPRsMiguel PérezAinda não há avaliações
- 04 Ui Walk Through PDFDocumento8 páginas04 Ui Walk Through PDFMiguel PérezAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Example Fast Fourier Oppenheim PDF TransformDocumento2 páginasExample Fast Fourier Oppenheim PDF TransformJamesAinda não há avaliações
- Questions On Integrity Constraints and ER ModelDocumento7 páginasQuestions On Integrity Constraints and ER ModelAditya RajAinda não há avaliações
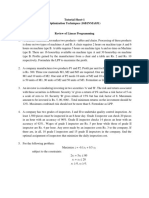
- Tutorial Sheet-1 Optimization Techniques (16B1NMA831)Documento2 páginasTutorial Sheet-1 Optimization Techniques (16B1NMA831)NITIN SHARMAAinda não há avaliações
- School of Data Science and Forecasting: M.B.A. (Business Analytics)Documento2 páginasSchool of Data Science and Forecasting: M.B.A. (Business Analytics)Purvi MajokaAinda não há avaliações
- ch13 Linear Factor ModelsDocumento33 páginasch13 Linear Factor Models黃良初Ainda não há avaliações
- HW 5 - SolutionDocumento9 páginasHW 5 - Solutionמיכאל סויסהAinda não há avaliações
- Face Recoganization ReportDocumento15 páginasFace Recoganization ReportYashwiniGowdaAinda não há avaliações
- End-to-End Deep Learning-Based Compressive Spectrum Sensing in Cognitive Radio NetworksDocumento6 páginasEnd-to-End Deep Learning-Based Compressive Spectrum Sensing in Cognitive Radio NetworksRock Feller Singh RussellsAinda não há avaliações
- Route Optimization Cold Chain Logistic Distribution Using Greedy Search MethodDocumento16 páginasRoute Optimization Cold Chain Logistic Distribution Using Greedy Search MethodJuan PachecoAinda não há avaliações
- Unit 3 Session 1Documento19 páginasUnit 3 Session 1Ankur JhaAinda não há avaliações
- CSE2013 TOC RevisedDocumento2 páginasCSE2013 TOC RevisedKUNAL GUPTA 20BCE1560Ainda não há avaliações
- Data Encryption Standard (DES)Documento63 páginasData Encryption Standard (DES)Sumit BalguvharAinda não há avaliações
- MS1008-Tutorial 6Documento23 páginasMS1008-Tutorial 6Nur FazeelaAinda não há avaliações
- Equipment Selection: MI5073: Planificación MineraDocumento29 páginasEquipment Selection: MI5073: Planificación MineraVale RCAinda não há avaliações
- Palomo Nicko Inducil Bsit-3cDocumento6 páginasPalomo Nicko Inducil Bsit-3clen kagamineAinda não há avaliações
- Tuan Tran - UTeach CSP-Heuristics HandoutDocumento3 páginasTuan Tran - UTeach CSP-Heuristics HandoutTuan TranAinda não há avaliações
- Path Planning For Automatic Berthing Using Ship-MaDocumento16 páginasPath Planning For Automatic Berthing Using Ship-MamhxdeeixfzfuaattrzAinda não há avaliações
- Correlation Analysis of Financial Indicators and Stock Price Fluctuations Based On Artificial Intelligence SystemDocumento4 páginasCorrelation Analysis of Financial Indicators and Stock Price Fluctuations Based On Artificial Intelligence SystemApeksha Madhukar Asst. Prof. Electrical Engg.Ainda não há avaliações
- Syllabus - CS 231N PDFDocumento1 páginaSyllabus - CS 231N PDFvonacoc49Ainda não há avaliações
- Implementation and Analysis of Google's Page Rank Algorithm Using Network DatasetDocumento5 páginasImplementation and Analysis of Google's Page Rank Algorithm Using Network DatasetriyaAinda não há avaliações
- Identifying Ordered Pairs 1Documento2 páginasIdentifying Ordered Pairs 1milkiasbelay131Ainda não há avaliações
- Derman Lectures SummaryDocumento30 páginasDerman Lectures SummaryPranay PankajAinda não há avaliações
- Artificial Intelligence Analyst (27nov20)Documento2 páginasArtificial Intelligence Analyst (27nov20)adil dahbiAinda não há avaliações
- Statistics Is The Study of The Collection, Organization, Analysis, and Interpretation of DataDocumento1 páginaStatistics Is The Study of The Collection, Organization, Analysis, and Interpretation of DataArbie FloresAinda não há avaliações
- Machine Vison Homework 10Documento11 páginasMachine Vison Homework 10Teddy BzAinda não há avaliações
- Modern Control System EKT 308Documento30 páginasModern Control System EKT 308Solehah Md HashimAinda não há avaliações
- Solution Manual For Introduction To Automata Theory Languages and Computation by ULmanDocumento45 páginasSolution Manual For Introduction To Automata Theory Languages and Computation by ULmanShafin Islam80% (49)
- Chapter 3 (Laplace Transform)Documento14 páginasChapter 3 (Laplace Transform)EmmanuelAinda não há avaliações
- Manzano Avene Carl N. BSEE 2 B Worksheet 3Documento3 páginasManzano Avene Carl N. BSEE 2 B Worksheet 3Uts IbarretaAinda não há avaliações
- PTLP 4Documento25 páginasPTLP 4ray ravenAinda não há avaliações