Você também pode gostar
- Applsci 09 03043Documento24 páginasApplsci 09 03043Lennin Stalyn BallínAinda não há avaliações
- MetodologiaEHAvsEMADocumento17 páginasMetodologiaEHAvsEMAFabián AcevedoAinda não há avaliações
- Design, Manufacturing, and Flight Testing of An Experimental Flying Wing UAVDocumento22 páginasDesign, Manufacturing, and Flight Testing of An Experimental Flying Wing UAVPetraKrhačAinda não há avaliações
- Design and Development of A 200-kW Turbo-Electric Distributed Propulsion Testbed - 2017Documento16 páginasDesign and Development of A 200-kW Turbo-Electric Distributed Propulsion Testbed - 2017Michael DuAinda não há avaliações
- Cost Metrics For Unmanned Aerial Vehicles: September 2005Documento7 páginasCost Metrics For Unmanned Aerial Vehicles: September 2005Elias Jose Akle VillarealAinda não há avaliações
- Drones: Analysis of Autonomous Unmanned Aerial Systems Based On Operational Scenarios Using Value ModellingDocumento17 páginasDrones: Analysis of Autonomous Unmanned Aerial Systems Based On Operational Scenarios Using Value ModellingNourhan FathyAinda não há avaliações
- Flight Control System Architecture Optimization For Fly-By-Wire AirlinersDocumento8 páginasFlight Control System Architecture Optimization For Fly-By-Wire AirlinersCharlton EddieAinda não há avaliações
- ScriptDocumento9 páginasScriptVictor GonzalezAinda não há avaliações
- Rule Based Aircraft Performance System: Metin ZontulDocumento6 páginasRule Based Aircraft Performance System: Metin ZontulJavier RomeroAinda não há avaliações
- EDFPROPDocumento25 páginasEDFPROPSidi Moulaye SidneAinda não há avaliações
- State of Art On Energy Management Strategy For Hybrid-Powered Unmanned Aerial VehicleDocumento16 páginasState of Art On Energy Management Strategy For Hybrid-Powered Unmanned Aerial VehiclecareerAinda não há avaliações
- Quadrotor Model For Energy Consumption ADocumento33 páginasQuadrotor Model For Energy Consumption ARafael EcksteinAinda não há avaliações
- Stability and Control of Stovl Aircraft PDFDocumento10 páginasStability and Control of Stovl Aircraft PDFChegrani AhmedAinda não há avaliações
- Modeling and Simulation of Aircraft EnginesDocumento12 páginasModeling and Simulation of Aircraft EnginesEnrique MartinezAinda não há avaliações
- Current Technologies and Challenges of Applying Fuel Cell Hybrid PropulsionDocumento22 páginasCurrent Technologies and Challenges of Applying Fuel Cell Hybrid PropulsionTomislav RosuljAinda não há avaliações
- UAV SubsystemsDocumento8 páginasUAV SubsystemsAmaryllis MiraeAinda não há avaliações
- Eucass2017 204Documento16 páginasEucass2017 204joseph.mangan1892Ainda não há avaliações
- A Comprehensive Review On Fuel Cell UAVDocumento36 páginasA Comprehensive Review On Fuel Cell UAVSab-Win DamadAinda não há avaliações
- Applied Sciences: Feasibility of A Helium Closed-Cycle Gas Turbine For UAV PropulsionDocumento18 páginasApplied Sciences: Feasibility of A Helium Closed-Cycle Gas Turbine For UAV PropulsionTabog SkiAinda não há avaliações
- A Methodology For Multirotor Aircraft Power Budget Analysis: Federico Barra, Matteo Scanavino Giorgio GuglieriDocumento8 páginasA Methodology For Multirotor Aircraft Power Budget Analysis: Federico Barra, Matteo Scanavino Giorgio Guglieriyounseok choiAinda não há avaliações
- Uav DesignDocumento4 páginasUav DesignLuis Angel SantamariaAinda não há avaliações
- UCAV Configuration & Performance Trade-OffsDocumento14 páginasUCAV Configuration & Performance Trade-OffsendoparasiteAinda não há avaliações
- 2019 A Critical Review On Unmanned Aerial Vehicles Power Supply and Energy Management - Solutions, Strategies, and ProspectsDocumento22 páginas2019 A Critical Review On Unmanned Aerial Vehicles Power Supply and Energy Management - Solutions, Strategies, and ProspectsNilaya SinghAinda não há avaliações
- Electric Propulsion System Sizing Methodology For An Agriculture MulticopterDocumento13 páginasElectric Propulsion System Sizing Methodology For An Agriculture MulticopterNguyen Thanh DatAinda não há avaliações
- Technology Challenges in Small UAV Development: NASA Langley Research Center, Hampton, Virginia, 23681Documento5 páginasTechnology Challenges in Small UAV Development: NASA Langley Research Center, Hampton, Virginia, 23681Hermes®Ainda não há avaliações
- Unit IDocumento73 páginasUnit ISulthan sAinda não há avaliações
- Rationalizing Aircraft PerformanceDocumento29 páginasRationalizing Aircraft PerformanceClifford NyathiAinda não há avaliações
- System Architectures For Solid Oxide Fuel Cell-Based Auxiliary Power Units in Future Commercial Aircraft ApplicationsDocumento10 páginasSystem Architectures For Solid Oxide Fuel Cell-Based Auxiliary Power Units in Future Commercial Aircraft ApplicationsMorgen GumpAinda não há avaliações
- Actuators 08 00042 With CoverDocumento17 páginasActuators 08 00042 With CovergauthamkashyapAinda não há avaliações
- Conceptual Design of Fixed Wing-VTOL UAV For AED Transport: December 2016Documento13 páginasConceptual Design of Fixed Wing-VTOL UAV For AED Transport: December 2016SaherAbdElMalakAinda não há avaliações
- 1 s2.0 S1000936120303368 MainDocumento19 páginas1 s2.0 S1000936120303368 MainAthul SureshAinda não há avaliações
- Research Article Conceptual Design of An Unmanned Fixed-Wing Aerial Vehicle Based On Alternative EnergyDocumento14 páginasResearch Article Conceptual Design of An Unmanned Fixed-Wing Aerial Vehicle Based On Alternative EnergyRobertoAinda não há avaliações
- Design and Aerodynamic Optimization of A Tri-Tilt RotorDocumento22 páginasDesign and Aerodynamic Optimization of A Tri-Tilt RotorSourav SangamAinda não há avaliações
- Aiaa 2009 4590 640Documento22 páginasAiaa 2009 4590 640Ioana-CarmenBoglisAinda não há avaliações
- Small Unmanned Aircraft: Theory and PracticeNo EverandSmall Unmanned Aircraft: Theory and PracticeNota: 4.5 de 5 estrelas4.5/5 (2)
- Aircraft Electric Secondary PowerDocumento195 páginasAircraft Electric Secondary PowerStevelespinsAinda não há avaliações
- An Integrated Approach To Vehicle and Subsystem Sizing and Analysis For Novel Subsystem ArchitecturesDocumento19 páginasAn Integrated Approach To Vehicle and Subsystem Sizing and Analysis For Novel Subsystem ArchitecturesO GoogleAinda não há avaliações
- Airplane Flying Handbook: FAA-H-8083-3C (2024)No EverandAirplane Flying Handbook: FAA-H-8083-3C (2024)Nota: 4 de 5 estrelas4/5 (12)
- Distributed Propulsion System Based Control of A Morphing Wing UAVDocumento29 páginasDistributed Propulsion System Based Control of A Morphing Wing UAVR DAinda não há avaliações
- The NRL Mite Air VehicleDocumento14 páginasThe NRL Mite Air Vehicleamir_karimiAinda não há avaliações
- Cover Sheet: This Is The Author Version of Article Published AsDocumento16 páginasCover Sheet: This Is The Author Version of Article Published AsVũ Huy MừngAinda não há avaliações
- Reducing Airlines’ Carbon Footprint: Using the Power of the Aircraft Electric Taxi SystemNo EverandReducing Airlines’ Carbon Footprint: Using the Power of the Aircraft Electric Taxi SystemAinda não há avaliações
- Applied Energy: SciencedirectDocumento13 páginasApplied Energy: SciencedirectCristian FloresAinda não há avaliações
- Ram Air Turbines - An Auxiliary Power Source For Modern AircraftDocumento5 páginasRam Air Turbines - An Auxiliary Power Source For Modern AircraftVictor BettAinda não há avaliações
- Optimization of A Hydrogen-Based Hybrid PropulsionDocumento16 páginasOptimization of A Hydrogen-Based Hybrid PropulsionewiontkoAinda não há avaliações
- RG Dcs LPR Eco Robotica08Documento6 páginasRG Dcs LPR Eco Robotica08endoparasiteAinda não há avaliações
- II. Flight Control System Designer ToolkitDocumento19 páginasII. Flight Control System Designer ToolkitdpnairAinda não há avaliações
- 06-Smart Structure Applications in Aircraft eDocumento9 páginas06-Smart Structure Applications in Aircraft eViknesh AngaiAinda não há avaliações
- Design of Hybrid Electric Aircraft With Fault Tol - 2023 - Chinese Journal of AeDocumento19 páginasDesign of Hybrid Electric Aircraft With Fault Tol - 2023 - Chinese Journal of AeEagle RyanAinda não há avaliações
- Estimating The Impact of Drone-Based Inspection OnDocumento22 páginasEstimating The Impact of Drone-Based Inspection OnNur khairul DanielAinda não há avaliações
- Tsac PenDocumento28 páginasTsac PenGOUAL SaraAinda não há avaliações
- Power Systems Group ReportDocumento16 páginasPower Systems Group Reportaplus.consultancyservices.3Ainda não há avaliações
- Morphing Wing StructuresDocumento7 páginasMorphing Wing StructuresManoj RamAinda não há avaliações
- Air Engine Literature ReviewDocumento6 páginasAir Engine Literature Reviewafmzkbysdbblih100% (1)
- Propulsion System Optimization For A Turboelectric Tiltwing Urban Air Mobility AircraftDocumento25 páginasPropulsion System Optimization For A Turboelectric Tiltwing Urban Air Mobility AircraftS KimAinda não há avaliações
- Flight Control Laws Carefree Handling Clearance of A Highly Manoeuvrable Aircraft Using Multi-Strategy Adaptive Global OptimizationDocumento15 páginasFlight Control Laws Carefree Handling Clearance of A Highly Manoeuvrable Aircraft Using Multi-Strategy Adaptive Global OptimizationBlaze123xAinda não há avaliações
- Aircraft Performance ThesisDocumento6 páginasAircraft Performance Thesisangelicaortizpaterson100% (2)
- Paper DLRK2017 Temme Trempler UAV Into Airport OperationsDocumento11 páginasPaper DLRK2017 Temme Trempler UAV Into Airport OperationsOlanrewaju EmmanuelAinda não há avaliações
- City Research Online: City, University of London Institutional RepositoryDocumento7 páginasCity Research Online: City, University of London Institutional RepositorygonesailAinda não há avaliações
- Nonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentNo EverandNonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentAinda não há avaliações
- Technical Data Mq-7 Gas Sensor: FeaturesDocumento3 páginasTechnical Data Mq-7 Gas Sensor: FeaturesFarshad yazdiAinda não há avaliações
- Modeling and Analysis of Piezoelectric Energy Harvesting From Aeroelastic Vibrations Using The Doublet-Lattice MethodDocumento9 páginasModeling and Analysis of Piezoelectric Energy Harvesting From Aeroelastic Vibrations Using The Doublet-Lattice MethodAdib PriatamaAinda não há avaliações
- Energy Efficiency For Unmanned Aerial Vehicles: 2011 10th International Conference On Machine Learning and ApplicationsDocumento5 páginasEnergy Efficiency For Unmanned Aerial Vehicles: 2011 10th International Conference On Machine Learning and ApplicationsAdib PriatamaAinda não há avaliações
- TPS55330 Transmitter Power SupplyDocumento2 páginasTPS55330 Transmitter Power SupplyAdib PriatamaAinda não há avaliações
- Applied Thermodynamics-Piston EnginesDocumento26 páginasApplied Thermodynamics-Piston Engineslui11111Ainda não há avaliações
- TPS55330 Transmitter Power SupplyDocumento2 páginasTPS55330 Transmitter Power SupplyAdib PriatamaAinda não há avaliações
- For The Detection of Carbon Monoxide: Applications: FeaturesDocumento2 páginasFor The Detection of Carbon Monoxide: Applications: FeaturesAdib PriatamaAinda não há avaliações
- Understanding 4-20ma Current LoopsDocumento3 páginasUnderstanding 4-20ma Current LoopsJoel OlsonAinda não há avaliações
- TC 04 03 Faq 35Documento2 páginasTC 04 03 Faq 35yoraj2002Ainda não há avaliações
- Catalysis Communications: Leonardo N. Silva, Valter L.C. Gonçalves, Claudio J.A. MotaDocumento4 páginasCatalysis Communications: Leonardo N. Silva, Valter L.C. Gonçalves, Claudio J.A. MotaAdib PriatamaAinda não há avaliações
- IFC GuidelinesDocumento15 páginasIFC GuidelinesKvvPrasadAinda não há avaliações
- Eductor Jet PumpDocumento2 páginasEductor Jet PumpPiyapiya Oh PiyapiyaAinda não há avaliações
- April OnlineDocumento4 páginasApril OnlineFHFP2011Ainda não há avaliações
- Efaeci: Engine Fuel Emission Control SystemDocumento151 páginasEfaeci: Engine Fuel Emission Control SystemMsi PCAinda não há avaliações
- 3054-3056e Perki̇ns Motor Eyi̇ti̇mi̇Documento4 páginas3054-3056e Perki̇ns Motor Eyi̇ti̇mi̇Kadir Koray Bozyel100% (1)
- Wiring Ecu CalyaDocumento22 páginasWiring Ecu Calyakurnia wan100% (4)
- 324D LN Excavator: Service Repair ManualDocumento27 páginas324D LN Excavator: Service Repair ManualAli EndrisAinda não há avaliações
- Specifications: 1206F-E70TA and 1206F-E70TTA Industrial EnginesDocumento64 páginasSpecifications: 1206F-E70TA and 1206F-E70TTA Industrial Enginesمحمد يونسAinda não há avaliações
- Distributed PowerDocumento3 páginasDistributed PowertibvalAinda não há avaliações
- The 1.8 Turbo Gasoline: Drive Your IdeasDocumento4 páginasThe 1.8 Turbo Gasoline: Drive Your Ideasmechatronics overviewAinda não há avaliações
- Every 1 500 Miles (2 400 KM) Lubricate Grease Points (Nipples) On Front-Axle (Documento2 páginasEvery 1 500 Miles (2 400 KM) Lubricate Grease Points (Nipples) On Front-Axle (Maria ClaytonAinda não há avaliações
- Gas Turbine Engine HafiyDocumento39 páginasGas Turbine Engine HafiyHafiy SiddqiAinda não há avaliações
- Power Source Engine Control (2AZ-FSE, 1AZ-FSE) Engine Control (2AZ-FSE, 1AZ-FSE) Engine Control (2AZ-FSE, 1AZ-FSE) Engine Control (2AZ-FSE, 1AZ-FSE) Cruise Control (2AZ-FSE, 1AZ-FSE)Documento1 páginaPower Source Engine Control (2AZ-FSE, 1AZ-FSE) Engine Control (2AZ-FSE, 1AZ-FSE) Engine Control (2AZ-FSE, 1AZ-FSE) Engine Control (2AZ-FSE, 1AZ-FSE) Cruise Control (2AZ-FSE, 1AZ-FSE)Alexander Neyra100% (1)
- D51ex-22-Catalogo Atualizado Kepb023313Documento555 páginasD51ex-22-Catalogo Atualizado Kepb023313Josiel Grunhauser100% (2)
- Codigos de Fallas Harley DavidsonDocumento3 páginasCodigos de Fallas Harley DavidsonRuffo Black CustomsAinda não há avaliações
- Trent XWB L & B Issue 3Documento578 páginasTrent XWB L & B Issue 3hakoj29142Ainda não há avaliações
- TWD1643GE: Volvo Penta Genset EngineDocumento2 páginasTWD1643GE: Volvo Penta Genset Enginemohsen_cumminsAinda não há avaliações
- Commutation in DC Machines PDFDocumento2 páginasCommutation in DC Machines PDFTom0% (1)
- On A/C All: Reference DesignationDocumento10 páginasOn A/C All: Reference DesignationOsama MagedAinda não há avaliações
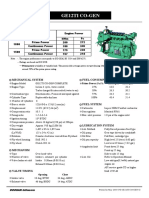
- Ge12ti Co Gen-GDocumento2 páginasGe12ti Co Gen-GTilok DasAinda não há avaliações
- Morooka MST500 Service ManualDocumento101 páginasMorooka MST500 Service Manualabdullah.rahmat93Ainda não há avaliações
- Engine MechanicalDocumento117 páginasEngine MechanicalВіталій ЛенівAinda não há avaliações
- AMC Straight-4 Engine - WikipediaDocumento5 páginasAMC Straight-4 Engine - WikipediaJordan4444409Ainda não há avaliações
- Volvo Penta 3.0 GS, 4.3 GL-GS-Gi, 5.0 GL-Gi, 5.7 GS-GSi, 7.4 Gi-GSi, 8.2 GSi SezDocumento41 páginasVolvo Penta 3.0 GS, 4.3 GL-GS-Gi, 5.0 GL-Gi, 5.7 GS-GSi, 7.4 Gi-GSi, 8.2 GSi SezLuciano LiuzziAinda não há avaliações
- RR250 Performace DataDocumento1 páginaRR250 Performace DataArne BergmanAinda não há avaliações
- Basic InfoDocumento4 páginasBasic InfoBudiy OnoAinda não há avaliações
- Active Ignition TimingDocumento3 páginasActive Ignition TimingKandarp PatelAinda não há avaliações
- WS202 W921 PDFDocumento1 páginaWS202 W921 PDFCristian D. Rodríguez VillamizarAinda não há avaliações
- Triumph Tr7 Tr8 Fuel Injection HandbookDocumento82 páginasTriumph Tr7 Tr8 Fuel Injection Handbookjorge Angel LopeAinda não há avaliações
- ReassemblyDocumento5 páginasReassemblypatrick barruetaAinda não há avaliações
- TC 92Documento18 páginasTC 92Hanuma ReddyAinda não há avaliações