Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Inkscribe v1 Astute Graphics ShortcutsDocumento9 páginasInkscribe v1 Astute Graphics ShortcutsraminjprAinda não há avaliações
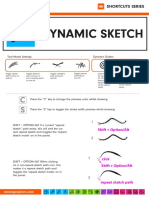
- Dynamicsketch v2 Astute Graphics ShortcutsDocumento4 páginasDynamicsketch v2 Astute Graphics ShortcutsraminjprAinda não há avaliações
- Arnett Thesis PDFDocumento70 páginasArnett Thesis PDFraminjprAinda não há avaliações
- Zachrisson Thesis03 PDFDocumento68 páginasZachrisson Thesis03 PDFraminjprAinda não há avaliações
- Dynamicsketch v2 Astute Graphics ShortcutsDocumento4 páginasDynamicsketch v2 Astute Graphics ShortcutsraminjprAinda não há avaliações
- CarSim Quick StartDocumento68 páginasCarSim Quick StartraminjprAinda não há avaliações
- Colliderscribe v2 Astute Graphics ShortcutsDocumento2 páginasColliderscribe v2 Astute Graphics ShortcutsraminjprAinda não há avaliações
- Tire Modeling ExplainedDocumento33 páginasTire Modeling ExplainedMatthew KenyonAinda não há avaliações
- Matlab Stateflow IntroDocumento34 páginasMatlab Stateflow IntroraminjprAinda não há avaliações
- Ipod Nano UserGuideDocumento104 páginasIpod Nano UserGuideraminjprAinda não há avaliações
- GRE Word ThesaurusDocumento137 páginasGRE Word ThesaurusPhanidhar GubbalaAinda não há avaliações
- Vehicle Dynamics - Thomas DDocumento38 páginasVehicle Dynamics - Thomas DJasbir Singh Dhanoa100% (1)
- Air MuscleDocumento22 páginasAir Musclesudeep9666Ainda não há avaliações
- Lathe Operations (I) FacingDocumento2 páginasLathe Operations (I) FacingraminjprAinda não há avaliações
- Higher Algebra - Hall & KnightDocumento593 páginasHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Isobutane Butane Fractionator PDFDocumento7 páginasIsobutane Butane Fractionator PDFhoustonmathAinda não há avaliações
- ECC206 - Ch6 - Distributed Forces - Centroids and Centers of ForcesDocumento36 páginasECC206 - Ch6 - Distributed Forces - Centroids and Centers of ForcesGravisAinda não há avaliações
- Optical Fiber SensorsDocumento35 páginasOptical Fiber SensorsLakshmiNarayana Reddy BynagariAinda não há avaliações
- Entropy Tutorial + SolutionsDocumento2 páginasEntropy Tutorial + SolutionsAnonymous 8SemaIglBvAinda não há avaliações
- Quantum Mechanics ch5 - 2Documento5 páginasQuantum Mechanics ch5 - 2alex61937Ainda não há avaliações
- Numerical in Electrical, Mechanical, Electronic, Optical Materials From Different Books Along With Previous Year Papers of GATE, ES, CS and Other Exams.Documento24 páginasNumerical in Electrical, Mechanical, Electronic, Optical Materials From Different Books Along With Previous Year Papers of GATE, ES, CS and Other Exams.Rehan Sharma100% (1)
- Magnetic InteractionsDocumento13 páginasMagnetic InteractionsZsuzsa BorsayAinda não há avaliações
- 18mat11 PDFDocumento3 páginas18mat11 PDFRavi TilaganjiAinda não há avaliações
- IB Chem 8 Assess Aws8Documento3 páginasIB Chem 8 Assess Aws8mgupta72Ainda não há avaliações
- Exercise 7: Tying A Well To A Seismic Line: ObjectiveDocumento5 páginasExercise 7: Tying A Well To A Seismic Line: ObjectiveSadiq JalalAinda não há avaliações
- Maths Blue Print:: Topic VSA SA LA TotalDocumento1 páginaMaths Blue Print:: Topic VSA SA LA TotalPradeep RavichandranAinda não há avaliações
- Doppler EffectDocumento8 páginasDoppler EffectJemimah MpofuAinda não há avaliações
- Applied Thermal Engineering: SciencedirectDocumento15 páginasApplied Thermal Engineering: SciencedirectSadegh AhmadiAinda não há avaliações
- Tutorial #3 #ProblemsDocumento5 páginasTutorial #3 #ProblemsAisha AbuzgaiaAinda não há avaliações
- 1st Year Important Questions 2019 - 2020Documento3 páginas1st Year Important Questions 2019 - 2020Lohith CharyAinda não há avaliações
- BE 8256 - Basic Mechanical Engineering / U – II / Compiled by R.Arul KamalakumarDocumento24 páginasBE 8256 - Basic Mechanical Engineering / U – II / Compiled by R.Arul KamalakumararulrakkAinda não há avaliações
- Radiation Protection and Dosimetry Assessment 2Documento2 páginasRadiation Protection and Dosimetry Assessment 2George ChahniAinda não há avaliações
- ABB Motor Signature AnalisisDocumento17 páginasABB Motor Signature AnalisisHari Krishna.M100% (2)
- AKUEB XI Physics Notes-1-1 PDFDocumento162 páginasAKUEB XI Physics Notes-1-1 PDFM.BILAL MADNI91% (11)
- Ad 0299980Documento68 páginasAd 0299980alexAinda não há avaliações
- Antenna Ass 1Documento19 páginasAntenna Ass 1Yonas D. EbrenAinda não há avaliações
- Finite Fourier Sine and Cosine Transforms: © 2007 by Taylor & Francis Group, LLCDocumento22 páginasFinite Fourier Sine and Cosine Transforms: © 2007 by Taylor & Francis Group, LLCsuperhunter007Ainda não há avaliações
- Substation Online Partial Discharge Testing (OLPD) Testing Tech. Update and InfoDocumento11 páginasSubstation Online Partial Discharge Testing (OLPD) Testing Tech. Update and InfoTrebor SantosAinda não há avaliações
- Enrtl-Rk Rate Based Dipa ModelDocumento34 páginasEnrtl-Rk Rate Based Dipa ModelsamandondonAinda não há avaliações
- Capillary Filling Dynamics of Viscoelastic Fluids: 10.1103/physreve.89.053024Documento10 páginasCapillary Filling Dynamics of Viscoelastic Fluids: 10.1103/physreve.89.053024kushal bosuAinda não há avaliações
- Optical Gyroscope With Whispering Gallery Mode Optical CavitiesDocumento6 páginasOptical Gyroscope With Whispering Gallery Mode Optical Cavitiesjalamia8796Ainda não há avaliações
- Physical Science Prelim - FinalDocumento10 páginasPhysical Science Prelim - FinalrichardsamranoAinda não há avaliações
- PIPE ProblemsDocumento8 páginasPIPE ProblemsNelson Naval Cabingas100% (3)
- EC2-Shear and TorsionDocumento9 páginasEC2-Shear and TorsionDonald HamiltonAinda não há avaliações
- Phy 104 Modern Physics Assignment 2Documento24 páginasPhy 104 Modern Physics Assignment 2Ahmed AliAinda não há avaliações