Você também pode gostar
- Electronics Hobby CircuitsDocumento183 páginasElectronics Hobby Circuitsbeckam88100% (3)
- Training For Humans Guide: FAQ's How Many Sets/reps Should I Do Per Exercise?Documento28 páginasTraining For Humans Guide: FAQ's How Many Sets/reps Should I Do Per Exercise?Paulo Pires100% (1)
- 110 Waveform Generator Projects for the Home ConstructorNo Everand110 Waveform Generator Projects for the Home ConstructorNota: 4 de 5 estrelas4/5 (1)
- Build Your Own Low-Power Transmitters: Projects for the Electronics ExperimenterNo EverandBuild Your Own Low-Power Transmitters: Projects for the Electronics ExperimenterNota: 5 de 5 estrelas5/5 (4)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Ainda não há avaliações
- Tutorial Timmer 555Documento9 páginasTutorial Timmer 555gabrielamedeletAinda não há avaliações
- 2022 WR Extended VersionDocumento71 páginas2022 WR Extended Versionpavankawade63Ainda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Nota: 2.5 de 5 estrelas2.5/5 (3)
- EE680Lab Experiment10-11Documento10 páginasEE680Lab Experiment10-11Arjay MomparAinda não há avaliações
- About TL494 Smps Control ICDocumento9 páginasAbout TL494 Smps Control ICTerlumun JosephAinda não há avaliações
- UltimateBeginnerHandbookPigeonRacing PDFDocumento21 páginasUltimateBeginnerHandbookPigeonRacing PDFMartinPalmAinda não há avaliações
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1No EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Nota: 4.5 de 5 estrelas4.5/5 (3)
- Astm B19Documento6 páginasAstm B19Davor IbarraAinda não há avaliações
- In Flight Fuel Management and Declaring MINIMUM MAYDAY FUEL-1.0Documento21 páginasIn Flight Fuel Management and Declaring MINIMUM MAYDAY FUEL-1.0dahiya1988Ainda não há avaliações
- Interlocking Block TechnologyDocumento15 páginasInterlocking Block TechnologyChaula Trivedi100% (5)
- ( (6) ) 555-Timer Receiver Unit (Receiver Driver) :: T 1.1 X R X C (In Seconds)Documento4 páginas( (6) ) 555-Timer Receiver Unit (Receiver Driver) :: T 1.1 X R X C (In Seconds)sitnahAinda não há avaliações
- Ultrasonic Distance MeterDocumento11 páginasUltrasonic Distance MeterHafiz Murtaza100% (3)
- Piano ReportDocumento9 páginasPiano ReportMaryam TariqAinda não há avaliações
- Ir Emitter Detector WriteupDocumento9 páginasIr Emitter Detector WriteupD Narciso SánchezAinda não há avaliações
- Ultrasonic Distance MeterDocumento5 páginasUltrasonic Distance MeterMahesh Jadhav100% (2)
- Alan48excel Multi All PapersDocumento32 páginasAlan48excel Multi All PapersvideoadvertAinda não há avaliações
- BECL404 ManualDocumento38 páginasBECL404 ManualbnchoukimathAinda não há avaliações
- Faculty of EngineeringDocumento7 páginasFaculty of Engineeringsitnah100% (1)
- Electronics Hardware Trouble Shooting Task 5Documento5 páginasElectronics Hardware Trouble Shooting Task 5SonyAinda não há avaliações
- Ica Lab AmnualDocumento14 páginasIca Lab AmnualNaga RajuAinda não há avaliações
- The DSE Radio Direction Finder PDFDocumento4 páginasThe DSE Radio Direction Finder PDFlazarosAinda não há avaliações
- Fig. 1: Clap Switch Block DiagramDocumento26 páginasFig. 1: Clap Switch Block DiagramDiljot Singh 236Ainda não há avaliações
- Rangkaian Saklar Sensor UltrasonikDocumento2 páginasRangkaian Saklar Sensor Ultrasoniksidodoy100% (1)
- 5 Channel IR Remote Control System Using MicrocontrollerDocumento5 páginas5 Channel IR Remote Control System Using MicrocontrollerKoushik MaityAinda não há avaliações
- Smart Guidance Stick ReportDocumento14 páginasSmart Guidance Stick Reportsitnah100% (1)
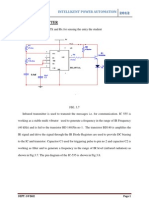
- 3.3. Ir Transmitter: Intelligent Power AutomationDocumento5 páginas3.3. Ir Transmitter: Intelligent Power AutomationJay VermaAinda não há avaliações
- Data Conditioning & Carrier Modulation Transmitter & Data Reconditioning & Carrier Demodulation ReceiverDocumento49 páginasData Conditioning & Carrier Modulation Transmitter & Data Reconditioning & Carrier Demodulation ReceiverCauVong JustinAinda não há avaliações
- Experiment No.4: FM Using 555 IcDocumento3 páginasExperiment No.4: FM Using 555 IcSree DhanyaAinda não há avaliações
- Unit-3 - Function Generator Using IC 8038Documento10 páginasUnit-3 - Function Generator Using IC 8038yp2401553Ainda não há avaliações
- LIC Manual MDocumento76 páginasLIC Manual MjananirajuAinda não há avaliações
- SDIC 11marks (Q & A) (Unit 2)Documento10 páginasSDIC 11marks (Q & A) (Unit 2)Ganapathy RamadossAinda não há avaliações
- Astable CircuitsDocumento9 páginasAstable CircuitsRavindranath ShrivastavaAinda não há avaliações
- RC OscillatorDocumento8 páginasRC OscillatorRavi TejaAinda não há avaliações
- 88-108 MHZ Voltage Controller Oscillator For PLL ControllerDocumento4 páginas88-108 MHZ Voltage Controller Oscillator For PLL ControllerChristopher Christian Cosingan0% (1)
- 09 Com104 PDFDocumento8 páginas09 Com104 PDFThành VỹAinda não há avaliações
- Frequency Modulation/ Demodulation System Trainer: MODEL-COM104Documento8 páginasFrequency Modulation/ Demodulation System Trainer: MODEL-COM104Lê Xuân HiếuAinda não há avaliações
- Plugin-LDICA LAB ManualDocumento83 páginasPlugin-LDICA LAB Manualnainesh goteAinda não há avaliações
- Frequency Modulation/ Demodulation System Trainer: MODEL-COM104Documento8 páginasFrequency Modulation/ Demodulation System Trainer: MODEL-COM104Lê Xuân HiếuAinda não há avaliações
- 1) Wireless Headphone ReceiverDocumento28 páginas1) Wireless Headphone ReceiverPetarPetrovicAinda não há avaliações
- Electronics Exercise 2: The 555 Timer and It's Applications: ObjectiveDocumento5 páginasElectronics Exercise 2: The 555 Timer and It's Applications: ObjectiveMichael AjayiAinda não há avaliações
- Voltage Controlled Oscillator - Usage of VCO, Working and ApplicationDocumento6 páginasVoltage Controlled Oscillator - Usage of VCO, Working and ApplicationseemabAinda não há avaliações
- PLL Ic 565Documento5 páginasPLL Ic 565T BlackAinda não há avaliações
- LIC Lab ManualDocumento43 páginasLIC Lab ManualManoj DAinda não há avaliações
- Lic Reports FinalDocumento11 páginasLic Reports FinalE L Sai BalajiAinda não há avaliações
- TDM Pulse Amplitude Modulation/ Demodulation Trainer: MODEL-COM202Documento12 páginasTDM Pulse Amplitude Modulation/ Demodulation Trainer: MODEL-COM202hvtspktAinda não há avaliações
- Time Division Multiplexing & DemultiplexingDocumento11 páginasTime Division Multiplexing & Demultiplexingaeganajith9Ainda não há avaliações
- Lic May-June 2017Documento15 páginasLic May-June 2017santhosh sekarAinda não há avaliações
- Multi VibratorDocumento6 páginasMulti VibratorAhie CherianAinda não há avaliações
- DLC Lab ManualDocumento59 páginasDLC Lab ManualkulamangalamAinda não há avaliações
- Design and Construction of A Remote Controlled Fan RegulatorDocumento9 páginasDesign and Construction of A Remote Controlled Fan RegulatorkaushaletAinda não há avaliações
- Safety Guard For Blind WorkingDocumento7 páginasSafety Guard For Blind WorkingSahil SethiAinda não há avaliações
- LIC Unit IVDocumento32 páginasLIC Unit IVDINESH KUMAR DRAVIDAMANIAinda não há avaliações
- Ultrasonic TransducerDocumento5 páginasUltrasonic TransducerRishabhKarn100% (3)
- Service Manual: DJ-596T / DJ-596EDocumento37 páginasService Manual: DJ-596T / DJ-596ERidwan SsrAinda não há avaliações
- 09 Com104Documento8 páginas09 Com104CauVong JustinAinda não há avaliações
- AssignmentDocumento11 páginasAssignmentfalab toheebAinda não há avaliações
- News Report or Report: Format: Head LineDocumento2 páginasNews Report or Report: Format: Head LinesitnahAinda não há avaliações
- © Kids Sunday School Place, Inc. All Rights ReservedDocumento1 página© Kids Sunday School Place, Inc. All Rights Reservedsitnah100% (1)
- English Question Paper 2015Documento2 páginasEnglish Question Paper 2015sitnah50% (2)
- Keynote Address 57th AC at MumbaiDocumento8 páginasKeynote Address 57th AC at Mumbaisitnah100% (1)
- Revised Guidelines - NTR Videshi VidyadharanaDocumento5 páginasRevised Guidelines - NTR Videshi Vidyadharanasitnah100% (1)
- The Beauty of Gods Creation 01Documento1 páginaThe Beauty of Gods Creation 01sitnahAinda não há avaliações
- Its A Beautiful World 01Documento1 páginaIts A Beautiful World 01sitnah100% (1)
- Adam Names The Animals 01Documento1 páginaAdam Names The Animals 01sitnah100% (1)
- The Prophet Daniel 02 TDocumento1 páginaThe Prophet Daniel 02 Tsitnah100% (1)
- Parable of The Sower 01 TDocumento1 páginaParable of The Sower 01 TsitnahAinda não há avaliações
- Faculty of EngineeringDocumento7 páginasFaculty of Engineeringsitnah100% (1)
- Sow The Word: © Kids Sunday School Place, Inc. All Rights ReservedDocumento1 páginaSow The Word: © Kids Sunday School Place, Inc. All Rights Reservedsitnah100% (1)
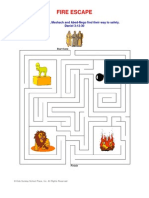
- Fire Escape: Help Shadrach, Meshach and Abed-Nego Find Their Way To Safety. Daniel 3:12-30Documento1 páginaFire Escape: Help Shadrach, Meshach and Abed-Nego Find Their Way To Safety. Daniel 3:12-30sitnah100% (1)
- Finite and Non-Finite VerbsDocumento3 páginasFinite and Non-Finite VerbssitnahAinda não há avaliações
- Smart Guidance Stick ReportDocumento14 páginasSmart Guidance Stick Reportsitnah100% (1)
- ReportDocumento1 páginaReportsitnahAinda não há avaliações
- Crew Timer SystemDocumento3 páginasCrew Timer Systemsitnah100% (1)
- Catedral de SevillaDocumento28 páginasCatedral de SevillaAnonymous LkgNmKeAinda não há avaliações
- Lesson 6 - Vibration ControlDocumento62 páginasLesson 6 - Vibration ControlIzzat IkramAinda não há avaliações
- Global Divides: The North and The South: National University Sports AcademyDocumento32 páginasGlobal Divides: The North and The South: National University Sports AcademyYassi CurtisAinda não há avaliações
- Notes:: Reinforcement in Manhole Chamber With Depth To Obvert Greater Than 3.5M and Less Than 6.0MDocumento1 páginaNotes:: Reinforcement in Manhole Chamber With Depth To Obvert Greater Than 3.5M and Less Than 6.0Mسجى وليدAinda não há avaliações
- SachinDocumento3 páginasSachinMahendraAinda não há avaliações
- Winter CrocFest 2017 at St. Augustine Alligator Farm - Final ReportDocumento6 páginasWinter CrocFest 2017 at St. Augustine Alligator Farm - Final ReportColette AdamsAinda não há avaliações
- Ra 9272Documento6 páginasRa 9272janesamariamAinda não há avaliações
- DBMS Lab ManualDocumento57 páginasDBMS Lab ManualNarendh SubramanianAinda não há avaliações
- LP For EarthquakeDocumento6 páginasLP For Earthquakejelena jorgeoAinda não há avaliações
- Chapter 23Documento9 páginasChapter 23Javier Chuchullo TitoAinda não há avaliações
- PDFDocumento10 páginasPDFerbariumAinda não há avaliações
- Disassembly Procedures: 1 DELL U2422HB - U2422HXBDocumento6 páginasDisassembly Procedures: 1 DELL U2422HB - U2422HXBIonela CristinaAinda não há avaliações
- Iguana Joe's Lawsuit - September 11, 2014Documento14 páginasIguana Joe's Lawsuit - September 11, 2014cindy_georgeAinda não há avaliações
- Drive LinesDocumento30 páginasDrive LinesRITESH ROHILLAAinda não há avaliações
- Escaner Electromagnético de Faja Transportadora-Steel SPECTDocumento85 páginasEscaner Electromagnético de Faja Transportadora-Steel SPECTEdwin Alfredo Eche QuirozAinda não há avaliações
- Clark SM 616 Service ManualDocumento20 páginasClark SM 616 Service Manualenid100% (55)
- 01 托福基础课程Documento57 páginas01 托福基础课程ZhaoAinda não há avaliações
- Acer N300 ManualDocumento50 páginasAcer N300 Manualc_formatAinda não há avaliações
- Physics Blue Print 1 Class XI Half Yearly 23Documento1 páginaPhysics Blue Print 1 Class XI Half Yearly 23Nilima Aparajita SahuAinda não há avaliações
- HatfieldDocumento33 páginasHatfieldAlex ForrestAinda não há avaliações
- Kiritsis SolutionsDocumento200 páginasKiritsis SolutionsSagnik MisraAinda não há avaliações
- Determination Rules SAP SDDocumento2 páginasDetermination Rules SAP SDkssumanthAinda não há avaliações
- Comparison Between CompetitorsDocumento2 páginasComparison Between Competitorsritesh singhAinda não há avaliações
- Cloud Comp PPT 1Documento12 páginasCloud Comp PPT 1Kanishk MehtaAinda não há avaliações