Você também pode gostar
- Introduction to the simulation of power plants for EBSILON®Professional Version 15No EverandIntroduction to the simulation of power plants for EBSILON®Professional Version 15Ainda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Ainda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Nota: 2.5 de 5 estrelas2.5/5 (3)
- Projects With Microcontrollers And PICCNo EverandProjects With Microcontrollers And PICCNota: 5 de 5 estrelas5/5 (1)
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGNo EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGAinda não há avaliações
- Previous Years Question Answers (Upscpdf - Com)Documento156 páginasPrevious Years Question Answers (Upscpdf - Com)Vivek SugandhAinda não há avaliações
- Process Control Lab ManualDocumento19 páginasProcess Control Lab ManualAnkit Singh100% (1)
- Neuron II Elgi CompressorDocumento42 páginasNeuron II Elgi CompressorOswaldo69% (16)
- Lesson Plan For Observation A Detailed Lesson Plan in Grade 9Documento3 páginasLesson Plan For Observation A Detailed Lesson Plan in Grade 9Gerald E Baculna40% (5)
- Interacting and Non Interacting SystemDocumento17 páginasInteracting and Non Interacting SystemGoutham Here100% (1)
- Fieldbus FundationDocumento128 páginasFieldbus FundationFelipe Andree Pavez Gutierrez100% (1)
- Delta Instruments Regulator PIDDocumento7 páginasDelta Instruments Regulator PIDRuth Alma CotrutaAinda não há avaliações
- EE 322 Control TheoryDocumento37 páginasEE 322 Control TheoryshrnbolonneAinda não há avaliações
- Exp - P9 - Pressure ControlDocumento9 páginasExp - P9 - Pressure ControlPriyanshu LilhaAinda não há avaliações
- ExercisesDocumento18 páginasExercisescetec1234Ainda não há avaliações
- Closed Loop Response of Temperature Control SystemDocumento6 páginasClosed Loop Response of Temperature Control SystemsjsujiprasadAinda não há avaliações
- EKC312Documento12 páginasEKC312bmw72Ainda não há avaliações
- PLCDocumento5 páginasPLCAika CatalanAinda não há avaliações
- What Is Instrument Hook Up Diagram ? Instrument Hook Up Diagram Is Also Called Installation Drawing, Specifies The ScopeDocumento31 páginasWhat Is Instrument Hook Up Diagram ? Instrument Hook Up Diagram Is Also Called Installation Drawing, Specifies The ScopevrajakisoriDasiAinda não há avaliações
- Exp - P6 - Temperature ControlDocumento10 páginasExp - P6 - Temperature ControlSiddesh PatilAinda não há avaliações
- Application Note AN2208: Universal PID-ThermoregulatorDocumento17 páginasApplication Note AN2208: Universal PID-ThermoregulatorJ Daniel PichardoAinda não há avaliações
- BCD Decade/Modulo 16 Binary Synchronous Bi-Directional Counters SN54/74LS168 SN54/74LS169Documento6 páginasBCD Decade/Modulo 16 Binary Synchronous Bi-Directional Counters SN54/74LS168 SN54/74LS169Ariel HdezAinda não há avaliações
- PCT100Documento2 páginasPCT100lockas222Ainda não há avaliações
- EWTR 920 Instruction Sheet Rel 11 - 00 enDocumento4 páginasEWTR 920 Instruction Sheet Rel 11 - 00 enila reehas100% (1)
- Development of A Temperature Control System: Hakan AYKULU 20083263 Department of Computer EngineeringDocumento23 páginasDevelopment of A Temperature Control System: Hakan AYKULU 20083263 Department of Computer EngineeringHakan AykuluAinda não há avaliações
- Temperature Control: On-Off ControllerDocumento9 páginasTemperature Control: On-Off Controllerdivyansh kashyapAinda não há avaliações
- Exp3 - Air Pressure ControlDocumento8 páginasExp3 - Air Pressure ControlDon LawrenceAinda não há avaliações
- PID Quick Start Guide Twidosuite - 21Documento27 páginasPID Quick Start Guide Twidosuite - 21Fernando RodriguesAinda não há avaliações
- Se201 (A4)Documento4 páginasSe201 (A4)Mehran Rasheed GorayaAinda não há avaliações
- PID KalkulatsioonDocumento11 páginasPID KalkulatsioonbmshivakumarAinda não há avaliações
- Two Tank Non-Interacting Liquid Level SystemDocumento9 páginasTwo Tank Non-Interacting Liquid Level SystemHimanshu JatAinda não há avaliações
- EC3-611 Rack Controller and ECD-000 Display UnitDocumento8 páginasEC3-611 Rack Controller and ECD-000 Display UnitMaria DazaAinda não há avaliações
- Presettable Bcd/Decade Up/Down Counter Presettable 4-Bit Binary Up/Down Counter SN54/74LS192 SN54/74LS193Documento9 páginasPresettable Bcd/Decade Up/Down Counter Presettable 4-Bit Binary Up/Down Counter SN54/74LS192 SN54/74LS193EDERTREVISANAinda não há avaliações
- Arico V-Series Temperature ControllersDocumento4 páginasArico V-Series Temperature ControllerscucomeleAinda não há avaliações
- JLD614 ManualDocumento8 páginasJLD614 ManualJ.R. VincentAinda não há avaliações
- General Specifications: Model Ut350 Digital Indicating ControllerDocumento12 páginasGeneral Specifications: Model Ut350 Digital Indicating ControllerMuhammad Massab KhanAinda não há avaliações
- Uputstvo PMGDocumento4 páginasUputstvo PMGZoka MarinkovićAinda não há avaliações
- Process Control PreliminariesDocumento25 páginasProcess Control PreliminariesJeremy ColemanAinda não há avaliações
- CLL 361 Instrumentation & Automation: Munawar A. ShaikDocumento28 páginasCLL 361 Instrumentation & Automation: Munawar A. ShaikRakeshKumarAinda não há avaliações
- Control Systems Background - The Regulation ProblemDocumento19 páginasControl Systems Background - The Regulation ProblemHilmy Pramuditya FhansuriAinda não há avaliações
- 74164Documento4 páginas74164milkyway69Ainda não há avaliações
- Digital Pid Controller Using Microcontroller: Nishant Mishra 02913204914 EEEDocumento37 páginasDigital Pid Controller Using Microcontroller: Nishant Mishra 02913204914 EEENishant MishraAinda não há avaliações
- EC2-742 Condenser ControllerDocumento4 páginasEC2-742 Condenser ControllerMaria DazaAinda não há avaliações
- Chapter 22Documento9 páginasChapter 22lotex77Ainda não há avaliações
- Level Control LoopDocumento9 páginasLevel Control LoopHriday NathAinda não há avaliações
- Analog - Digital - PC Based - PidDocumento18 páginasAnalog - Digital - PC Based - PidAAYUSH KUMARAinda não há avaliações
- Prolific's Training Program Controllers: Prolific Systems and Technologies PVT LTDDocumento24 páginasProlific's Training Program Controllers: Prolific Systems and Technologies PVT LTDSiddharth VermaAinda não há avaliações
- Maxthermo Pid ControllersDocumento24 páginasMaxthermo Pid ControllersmoncieldonAinda não há avaliações
- Temperature ControllerDocumento22 páginasTemperature ControllernehalAinda não há avaliações
- Proses Trainer DatasheetDocumento2 páginasProses Trainer DatasheetDenny ChrisnandaAinda não há avaliações
- AVR221 Discrete PID ControllerDocumento10 páginasAVR221 Discrete PID ControllerSadık KorkmazAinda não há avaliações
- Courseware Sample by Lab-VoltDocumento24 páginasCourseware Sample by Lab-VoltiedmondAinda não há avaliações
- KFM Controlador PDFDocumento8 páginasKFM Controlador PDFRodolfoAntonioLeónCárdenasAinda não há avaliações
- 74197Documento8 páginas74197Mary RodríguezAinda não há avaliações
- 200W TEC Air Conditioner SpecificationDocumento8 páginas200W TEC Air Conditioner Specificationtuananh1965Ainda não há avaliações
- Chapter 22 General Purpose PID ControlDocumento10 páginasChapter 22 General Purpose PID ControlEduardo AlvearAinda não há avaliações
- Auto Tuning of PID Controller For MIMO Processes: M. J. Lengare, R. H. Chile, L. M. Waghmare and Bhavesh ParmarDocumento4 páginasAuto Tuning of PID Controller For MIMO Processes: M. J. Lengare, R. H. Chile, L. M. Waghmare and Bhavesh ParmarDavid DebonoAinda não há avaliações
- PID ControllerDocumento4 páginasPID ControllerRaja SimhanAinda não há avaliações
- Microelectronic Systems N2 Checkbook: The Checkbook SeriesNo EverandMicroelectronic Systems N2 Checkbook: The Checkbook SeriesAinda não há avaliações
- Thermodynamic and Theoretical Aspects of Emulsions and Their StabilityDocumento6 páginasThermodynamic and Theoretical Aspects of Emulsions and Their StabilityGoutham HereAinda não há avaliações
- Flapper Nozzle SystemDocumento2 páginasFlapper Nozzle SystemGoutham HereAinda não há avaliações
- Invitation Esummit 2017Documento1 páginaInvitation Esummit 2017Goutham HereAinda não há avaliações
- Pressure Control TrainerDocumento19 páginasPressure Control TrainerGoutham Here100% (1)
- Temperature Control SystemDocumento5 páginasTemperature Control SystemGoutham HereAinda não há avaliações
- First and Second Order SystemsDocumento13 páginasFirst and Second Order SystemsGoutham HereAinda não há avaliações
- Quest Tutorials Head Office:: 44C, Kaloo Sarai, N.D.-16 Ph. 46080363Documento10 páginasQuest Tutorials Head Office:: 44C, Kaloo Sarai, N.D.-16 Ph. 46080363Goutham HereAinda não há avaliações
- Agent-Based Simulation: Principles of Simulation and The Multi-Agent ApproachDocumento42 páginasAgent-Based Simulation: Principles of Simulation and The Multi-Agent ApproachtuanngthanhAinda não há avaliações
- Deposit EP BVADocumento3 páginasDeposit EP BVAThirunavukarasuMunusamyAinda não há avaliações
- PDC Minor 2 - SlidesDocumento190 páginasPDC Minor 2 - SlidesPiyush AmbulgekarAinda não há avaliações
- Bloch PDFDocumento66 páginasBloch PDFAshish_Singh_5126Ainda não há avaliações
- Extended Family Relationships - How They Impact The Mental HealthDocumento64 páginasExtended Family Relationships - How They Impact The Mental HealthHanabusa Kawaii IdouAinda não há avaliações
- Proportional-Integral-Derivative and Linear Quadratic Regulator Control of Direct Current Motor Position Using Multi-Turn Based On LabviewDocumento5 páginasProportional-Integral-Derivative and Linear Quadratic Regulator Control of Direct Current Motor Position Using Multi-Turn Based On LabviewGERARDO CABRERAAinda não há avaliações
- On A New Four-Dimensional Model of Memristor-Based Chaotic Circuit in The Context of Nonsingular Atangana-Baleanu-Caputo OperatorsDocumento24 páginasOn A New Four-Dimensional Model of Memristor-Based Chaotic Circuit in The Context of Nonsingular Atangana-Baleanu-Caputo OperatorsRahul VishwakarmaAinda não há avaliações
- Software TestingDocumento3 páginasSoftware TestingDr. P. N. Renjith Associate Professor - CSEAinda não há avaliações
- Uml Lecture PDFDocumento4 páginasUml Lecture PDFMuhammad MoizAinda não há avaliações
- LSTM Recurrent Neural Networks - How To Teach A Network To Remember The Past - by Saul Dobilas - Towards Data ScienceDocumento20 páginasLSTM Recurrent Neural Networks - How To Teach A Network To Remember The Past - by Saul Dobilas - Towards Data Sciencetarunbandari4504Ainda não há avaliações
- A.M. Selvam Chaotic Climate Dynamics LunDocumento1 páginaA.M. Selvam Chaotic Climate Dynamics LunAnya NieveAinda não há avaliações
- R 170 Diagrama de Refrigerante P HDocumento1 páginaR 170 Diagrama de Refrigerante P HJuan QuispeAinda não há avaliações
- Teaching Plan Software EngineeringDocumento11 páginasTeaching Plan Software EngineeringHabeeb E SadeedAinda não há avaliações
- OOAD Unit 5 - Traffic Management SystemDocumento20 páginasOOAD Unit 5 - Traffic Management Systemlilooooooooooo100% (2)
- TEDocumento107 páginasTEMohamed HenanshaAinda não há avaliações
- Automation: Name of The Faculty: Manish Dhawan UID: 14630 E-Mail ID: Manish.14630@lpu - Co.inDocumento11 páginasAutomation: Name of The Faculty: Manish Dhawan UID: 14630 E-Mail ID: Manish.14630@lpu - Co.inmanishtopsecretsAinda não há avaliações
- Introduction To Ecology & Levels of The Environment - Print - QuizizzDocumento3 páginasIntroduction To Ecology & Levels of The Environment - Print - QuizizzandieAinda não há avaliações
- Chapter 7 Rev 114587 MkjuytrDocumento14 páginasChapter 7 Rev 114587 MkjuytrAparna KadamAinda não há avaliações
- Artigo INDUSCON - Stenio - REV - FinalDocumento8 páginasArtigo INDUSCON - Stenio - REV - FinalStenio CoelhoAinda não há avaliações
- Thermodynamic NotesDocumento5 páginasThermodynamic NotesKarthick JyothieshwarAinda não há avaliações
- B 5 - HubSpot and Motion AI Chatbot Enabled CRMDocumento2 páginasB 5 - HubSpot and Motion AI Chatbot Enabled CRMVasudev GuduriAinda não há avaliações
- A Simple PID Controller With Adaptive Parameter in A DsPICDocumento5 páginasA Simple PID Controller With Adaptive Parameter in A DsPICAlfian Apin Ma'arifAinda não há avaliações
- Lean Six Sigma Skills AssessmentDocumento4 páginasLean Six Sigma Skills Assessmentnaacha457Ainda não há avaliações
- Project Management and The Inception PhaseDocumento4 páginasProject Management and The Inception PhasegokulAinda não há avaliações
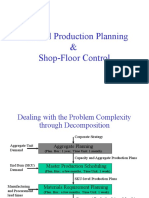
- MPS & MRPDocumento41 páginasMPS & MRPdeliciousfood96Ainda não há avaliações
- Prototype and Spiral ModelDocumento6 páginasPrototype and Spiral ModelrajeshAinda não há avaliações
- Taylor Solutions Rockwell 2012Documento2 páginasTaylor Solutions Rockwell 2012kfathi55Ainda não há avaliações
- AssignmentDocumento17 páginasAssignmentanas cabdisalaam NuurAinda não há avaliações