Você também pode gostar
- Linear Search, Binary SearchDocumento5 páginasLinear Search, Binary SearchcjkAinda não há avaliações
- Binary Search AlgorithmDocumento12 páginasBinary Search AlgorithmMirsha IdaAinda não há avaliações
- AutomataDocumento20 páginasAutomataPradeepAinda não há avaliações
- JAVA Thread DumpDocumento5 páginasJAVA Thread Dumpreach2dpg100% (1)
- DBMS 3Documento16 páginasDBMS 3Sayantan MandalAinda não há avaliações
- C Language BasicsDocumento61 páginasC Language Basicsinfotainment100% (1)
- CS1201 Data StructuresDocumento4 páginasCS1201 Data StructuressureshAinda não há avaliações
- Binary Search Algorithm AssignmentDocumento5 páginasBinary Search Algorithm AssignmentBigmano KcAinda não há avaliações
- Algorithms: Searching & Sorting: Unit 10Documento47 páginasAlgorithms: Searching & Sorting: Unit 10Jun Min NohAinda não há avaliações
- Pig HiveDocumento72 páginasPig HivesuhasspotifypvtAinda não há avaliações
- Python Pandas N-WPS OfficeDocumento15 páginasPython Pandas N-WPS OfficeDeepanshu RajputAinda não há avaliações
- CheatSheet Python 6 Coding Interview QuestionsDocumento1 páginaCheatSheet Python 6 Coding Interview Questionssadeq moghaddasiAinda não há avaliações
- Functions in C ProgrammingDocumento27 páginasFunctions in C ProgrammingBharatraj100% (1)
- Data Structures With C LabDocumento40 páginasData Structures With C LabPradeep Gowda100% (2)
- 08-Maps BST PDFDocumento46 páginas08-Maps BST PDFRay JiaAinda não há avaliações
- 1-Foundations (EID REHMAN)Documento73 páginas1-Foundations (EID REHMAN)Farhana Aijaz100% (1)
- Filehandling (Programs)Documento7 páginasFilehandling (Programs)Deepika ParamasivamoorthiAinda não há avaliações
- Javascript PDFDocumento5 páginasJavascript PDFanasAinda não há avaliações
- Two Marks Questions and Answers For Object Oriented ProgrammingDocumento22 páginasTwo Marks Questions and Answers For Object Oriented ProgrammingRaja SekarenAinda não há avaliações
- COSC2429 - Intro To Programming Assessment 2 - Sem A 2021: RMIT Classification: TrustedDocumento3 páginasCOSC2429 - Intro To Programming Assessment 2 - Sem A 2021: RMIT Classification: Trustedroll_wititAinda não há avaliações
- CDS & OOP VivaDocumento16 páginasCDS & OOP VivaUday Desiraj100% (1)
- Unit II Database DesignDocumento53 páginasUnit II Database DesignCptc CtAinda não há avaliações
- Cs 8391-Data Structures 2 Marks With Answer: Unit I - Linear Structures - ListDocumento26 páginasCs 8391-Data Structures 2 Marks With Answer: Unit I - Linear Structures - ListMerbin JoseAinda não há avaliações
- TCP Socket For AdditionDocumento9 páginasTCP Socket For AdditionindrajeetAinda não há avaliações
- PPT Ch09 (Adv Arrays)Documento86 páginasPPT Ch09 (Adv Arrays)archana_saidAinda não há avaliações
- DS Interview QuestionsDocumento3 páginasDS Interview QuestionsDeepak MashalkarAinda não há avaliações
- Ada Lab Manual (Mca Iv Sem Vtu)Documento64 páginasAda Lab Manual (Mca Iv Sem Vtu)rajthebestof2008Ainda não há avaliações
- Hana PDFDocumento7 páginasHana PDFDevender5194Ainda não há avaliações
- DS&Algo - Lab Assignment Sheet - NewDocumento7 páginasDS&Algo - Lab Assignment Sheet - NewVarsha SinghAinda não há avaliações
- Linux Command Line Cheat SheetDocumento2 páginasLinux Command Line Cheat SheetpusculAinda não há avaliações
- RecursionDocumento38 páginasRecursionanjugaduAinda não há avaliações
- Input and Output Statements PDFDocumento11 páginasInput and Output Statements PDFRajendra BuchadeAinda não há avaliações
- Data Structures-Sorting and Searching, HashingDocumento35 páginasData Structures-Sorting and Searching, HashingSudhakar KAinda não há avaliações
- R Programming Practical File (1319036)Documento25 páginasR Programming Practical File (1319036)UtkarshAinda não há avaliações
- MA60002 Data Structure and Algorithms (Bhakt)Documento2 páginasMA60002 Data Structure and Algorithms (Bhakt)Gaurav KumarAinda não há avaliações
- Python Lab FileDocumento26 páginasPython Lab Fileankit kumarAinda não há avaliações
- Data Structures and AlgorithmDocumento35 páginasData Structures and Algorithmdan hernandoAinda não há avaliações
- Design of Control UnitDocumento19 páginasDesign of Control UnitArjun Nain100% (1)
- CA 2marksDocumento41 páginasCA 2marksJaya ShreeAinda não há avaliações
- MODULE 4 Functions and PointersDocumento19 páginasMODULE 4 Functions and Pointersmanoj hmAinda não há avaliações
- Python - Function - Author SlidesDocumento28 páginasPython - Function - Author SlidesMishab IAinda não há avaliações
- 4.1 Divide and ConquerDocumento21 páginas4.1 Divide and Conquermadhu jhaAinda não há avaliações
- Programming QuestionsDocumento16 páginasProgramming QuestionsYashwanth jonnagaddalaAinda não há avaliações
- Module 5 - 2Documento1 páginaModule 5 - 2deepakkashyaAinda não há avaliações
- Data Mining and Business Intelligence Lab ManualDocumento52 páginasData Mining and Business Intelligence Lab ManualVinay JokareAinda não há avaliações
- Introduction To Databases: DB2 Tutorial:-What Is Data?Documento16 páginasIntroduction To Databases: DB2 Tutorial:-What Is Data?RamGokul MAinda não há avaliações
- SQL Practice ProblemsDocumento4 páginasSQL Practice Problemsvish_vinnyAinda não há avaliações
- Introduction To Data Structures - BCADocumento27 páginasIntroduction To Data Structures - BCASourav RoyAinda não há avaliações
- Iterations Java Problems 1Documento5 páginasIterations Java Problems 1api-450773950Ainda não há avaliações
- PYTHON Chapter 2 PDFDocumento11 páginasPYTHON Chapter 2 PDFAkAinda não há avaliações
- BD - Unit - IV - Hive and PigDocumento41 páginasBD - Unit - IV - Hive and PigPrem KumarAinda não há avaliações
- CS218-Data Structures Final ExamDocumento7 páginasCS218-Data Structures Final ExamRafayGhafoorAinda não há avaliações
- TLAD SQL PatternsDocumento12 páginasTLAD SQL PatternsAbdul WahabAinda não há avaliações
- C Program To Convert Binary Number To Octal and Octal To BinaryDocumento3 páginasC Program To Convert Binary Number To Octal and Octal To BinaryAnonymous sMqylHAinda não há avaliações
- BinarryDocumento3 páginasBinarryRafiullah HaqmalAinda não há avaliações
- Unit 9 Searching: Structure Page NosDocumento10 páginasUnit 9 Searching: Structure Page NosAnup RaghuveerAinda não há avaliações
- ES106: Programming For Engineers: Lecture 9, 10, 11: Basic AlgorithmDocumento16 páginasES106: Programming For Engineers: Lecture 9, 10, 11: Basic AlgorithmVishvas SutharAinda não há avaliações
- Binary Search: Binary Search or Half-Interval SearchDocumento4 páginasBinary Search: Binary Search or Half-Interval SearchAafi QaisarAinda não há avaliações
- Searching: By: Deepak Kumar SinghDocumento24 páginasSearching: By: Deepak Kumar Singhसुरज पौडेलAinda não há avaliações
- Searching and SortingDocumento19 páginasSearching and SortingpankajusbAinda não há avaliações
- Attenuation in Neper: Attenuation in Decibel:: 1 2 LN 20 LogDocumento3 páginasAttenuation in Neper: Attenuation in Decibel:: 1 2 LN 20 LogarchumeenabaluAinda não há avaliações
- HSN SyllabusDocumento1 páginaHSN SyllabusarchumeenabaluAinda não há avaliações
- HSN - 2mks With AnsDocumento16 páginasHSN - 2mks With AnsarchumeenabaluAinda não há avaliações
- July 2015 Current AffairsDocumento4 páginasJuly 2015 Current AffairsarchumeenabaluAinda não há avaliações
- In Computer ProgrammingDocumento1 páginaIn Computer ProgrammingarchumeenabaluAinda não há avaliações
- GeometryDocumento31 páginasGeometryarchumeenabalu100% (1)
- Data Communicatin and NetworkingDocumento30 páginasData Communicatin and NetworkingarchumeenabaluAinda não há avaliações
- DefibrillationDocumento11 páginasDefibrillationarchumeenabaluAinda não há avaliações
- Chapter 1 - Fundamentals of Computer DesignDocumento40 páginasChapter 1 - Fundamentals of Computer Designarchumeenabalu100% (1)
- Routing Protocols For MANET: Doc.: IEEE 802.11-00/1047r0Documento55 páginasRouting Protocols For MANET: Doc.: IEEE 802.11-00/1047r0archumeenabaluAinda não há avaliações
- Optimasi Blending Pertalite Dengan Komponen Reformate Di PT. XYZ BalikpapanDocumento7 páginasOptimasi Blending Pertalite Dengan Komponen Reformate Di PT. XYZ BalikpapanFrizki AkbarAinda não há avaliações
- Dogging Guide 2003 - WorkCover NSWDocumento76 páginasDogging Guide 2003 - WorkCover NSWtadeumatas100% (1)
- Quantity Surveying Division Assessment of Professional Competence Final Assessment 2014 Practice Problems / Part Ii Written TestDocumento31 páginasQuantity Surveying Division Assessment of Professional Competence Final Assessment 2014 Practice Problems / Part Ii Written TestjackyAinda não há avaliações
- EN 1991-1-4 NA enDocumento4 páginasEN 1991-1-4 NA enanuj3936100% (1)
- 1Documento100 páginas1Niomi GolraiAinda não há avaliações
- 3-Axially Loaded Compresion Members PDFDocumento37 páginas3-Axially Loaded Compresion Members PDFKellen BrumbaughAinda não há avaliações
- HiraDocumento30 páginasHiravijay kumar singhAinda não há avaliações
- Honeywell P7640B1032 Differential Pressure Sensors PDFDocumento2 páginasHoneywell P7640B1032 Differential Pressure Sensors PDFMarcello PorrinoAinda não há avaliações
- Using Dapper Asynchronously inDocumento1 páginaUsing Dapper Asynchronously inGiovani BrondaniAinda não há avaliações
- Product Management Self-Learning ManualDocumento261 páginasProduct Management Self-Learning ManualAbhishek Arekar100% (1)
- Kubernetes CommandsDocumento36 páginasKubernetes CommandsOvigz Hero100% (2)
- Wireless Intelligent Network (WIN)Documento24 páginasWireless Intelligent Network (WIN)Nakul Gawande100% (1)
- Shell Hazardous Area Classification FundamentalsDocumento30 páginasShell Hazardous Area Classification Fundamentalsthekevindesai100% (17)
- Selling Your Contents To The WorldDocumento25 páginasSelling Your Contents To The WorldCreative Malaysia100% (1)
- CLS 747 200Documento158 páginasCLS 747 200Rodrigo Adam100% (8)
- Alloys DensityDocumento4 páginasAlloys DensityArnold Melissa CollettAinda não há avaliações
- VLE Lactic Acid Ethyl Lactate Esterification PDFDocumento7 páginasVLE Lactic Acid Ethyl Lactate Esterification PDFAseem Kashyap0% (1)
- OoselabDocumento53 páginasOoselabHarshpreet KaurAinda não há avaliações
- Geotechnical Engineering 1 (RMIT) Course RevisionDocumento53 páginasGeotechnical Engineering 1 (RMIT) Course RevisionSaint123Ainda não há avaliações
- G270han01 V0Documento26 páginasG270han01 V0NemkoAinda não há avaliações
- ENOVIA V6 Product PortfolioDocumento32 páginasENOVIA V6 Product PortfolioARUN PATILAinda não há avaliações
- Crankshaft Position (CKP) Sensor: 1F2-12 M161 Engine ControlsDocumento6 páginasCrankshaft Position (CKP) Sensor: 1F2-12 M161 Engine ControlsKukuh SeptiantoAinda não há avaliações
- WEISER Locks and HardwareDocumento24 páginasWEISER Locks and HardwareMaritime Door & WindowAinda não há avaliações
- Receiving Material Procedure (Done) (Sudah Direvisi)Documento8 páginasReceiving Material Procedure (Done) (Sudah Direvisi)Hardika SambilangAinda não há avaliações
- Programming Bayes Rule OptionalDocumento17 páginasProgramming Bayes Rule OptionalajuhaseenAinda não há avaliações
- 20 Site SummaryDocumento2 páginas20 Site SummaryMuzammil WepukuluAinda não há avaliações
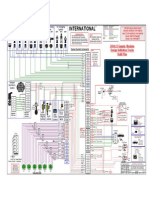
- Esquema Elétrico NGD 9.3Documento2 páginasEsquema Elétrico NGD 9.3LuisCarlosKovalchuk100% (1)
- JNTUA B Tech 2018 1 2 May R15 ECE 15A54201 Mathematics IIDocumento2 páginasJNTUA B Tech 2018 1 2 May R15 ECE 15A54201 Mathematics IIMRUDULA KULAKARNIAinda não há avaliações
- 4 and 6 Pole MotorDocumento6 páginas4 and 6 Pole Motorarajamani78100% (1)
- ZF CAT EBook Oil-Filters-Construction-Agricultural-Machinery-Transmissions 50114 201806 V02 IN PDFDocumento142 páginasZF CAT EBook Oil-Filters-Construction-Agricultural-Machinery-Transmissions 50114 201806 V02 IN PDFdeisy ortegaAinda não há avaliações