BEST: International Journal of Management, Information
Technology and Engineering (BEST: IJMITE)
ISSN 2348-0513
Vol. 3, Issue 6, Jun 2015, 35-38
BEST Journals
SURVEY ON MULTIFUNCTIONAL ROBOTIC VEHICLE FOR AGRICULTURE
APPLICATION
CHARANSINGH A. PATIL1 & SUNIL U. NYATI2
1
2
M.E. Student, Ssbts C.O.E.T Bambhori, Jalgaon Maharastra, India
Associate Professor, Ssbts C.O.E.T Bambhori, Jalgaon Maharastra, India
ABSTRACT
This paper proposes Multifunctional robotic vehicle for agriculture application. Historically agriculture was
carried out using hand held tools and as the civilization progressed people started using animal driven tools. After that
autonomous ag robots for agriculture. In the developed countries the mechanized agriculture has reached to a matured state
but in the developing countries like India is still evolving. The mechanized agriculture autonomous agri robots for
improving agriculture productivity must increases to meet the future demand of the ever grooving human population to
overcome it we will developing robotic vehicle. Agriculture robotic are machines programmed to do agricultural task and
form assignments. Such as: Harvesting or picking, weeding, spraying, cutting. The challenge is designing and developing
robots to work in harmony with the nature
KEYWORDS: Multifunctional Robotic, Harvesting or Picking, Weeding, Spraying, Cutting
INTRODUCTION
In this age of industrialization robotic agriculture (agricultural environments serviced by smart machines)
is developed to need of fast shrinking human assist machinery for that we will developed multifunctional robotic vehicle
For agriculture application driverless tractors have been developed by many researchers in the past but they lack in abilities
to handle real world complexities most of the engineers relied on industrial and mechanical way of farming. where
machines could work entirely in predefined ways as everything was programmed in system much like a manufacture line.
The task to address is to design an intelligent system that can perform in an original or semi natural conditions. This system
should not have to be as intelligent as human being but must show sensible behavior in context of recognition.
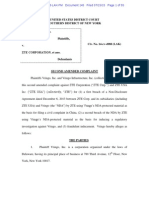
Figure 1: (Left) Portal Crop Scouting Platform
(Madsen and Jakobsen 2001), (Right) Sub Canopy Robot ISAAC2
36
Charansingh A. Patil & Sunil U. Nyati
The environmental implications are additional advantage. In some regards, Phytotechnology could benefit the
ecology over conventional methodology like Minimized inputs to reduce waste and pollution, controlled biodiversity by
retaining non-competitive weeds, more intelligent physical methods replacing chemical solutions. Economic factors
include lower labour costs (a significant saving if they can be made fully autonomous), incremental investment in, perhaps,
a small machine each year, rather than a single large machine every 6 years. These small vehicles could be articulated from
existing mass produced tools such as car parts without the need for particular design and tooling. Consideration of social
aspects shows that the public are ready for smarts machines to be used in food industry, by the level of interest shown by
the media and when being demonstrated. Insurance and liability will be a lot easier with smaller autonomous machines.
The new technology has an automatic mode in which it can take its own decision for combating. In addition to this it also
includes some of the features like seed detection, DNA mapping, weeding
METHODOLOGY
Figure 2: Block Diagram of a Simple Robot
The new technology has an automatic mode in which it can take its own decision for combating. In addition to
this it also includes some of the features like seed detection, DNA mapping, weeding, micro-spraying, irrigation and
harvesting
In this technology, initially the robot will test the soil of the land of cultivating area. After testing the soil, it will
place the seed and monitoring the status of the seed. The monitoring status mainly defines the climatic conditions.
After the plant grows, it will checks the DNA structure of the growing plant with the uploaded structure and enriches its
nutrients by mutation. The monitoring of the plant will take place and climatic conditions are also measured. Finally it will
cultivate the plant with enriched nutrients
PHYTOTECHNOLOGY
The approach of treating crop and soil selectively according to their needs by small autonomous machines is the
natural next step in the development of Precision Farming (PF) as it reduces the field scale right down to the individual
plant or Phytotechnology. One simple definition of PF is doing the right thing in the right place at the right time with the
right amount. This definition not only applies to robotic agriculture (RA) and phytotechnology but it also implies a level of
automation inherent in the machines. Automatic sensing and control (on-the-go) for each task is also important and many
research papers have shown that these systems are feasible but most are too slow, and hence not economically viable, to be
operated on a manned tractor. Once these systems are mounted on an autonomous vehicle, they may well suddenly become
commercially viable
Survey on Multifunctional Robotic Vehicle for Agriculture Application
37
MODERN AGRICULTURE
Modern agriculture uses a lot of energy. It comes in many forms from fertilisers and chemicals to tractors and
fuel. The Phytotechnology approach tries to target the introduced energy to improve efficacy. Chamen (1995) identified
that a 72% energy saving can be made in cultivation energy by moving from traditional trafficked systems (256 MJ/ha) to a
non-trafficked system (79 MJ/ha). This was for shallow ploughing and did not include any deep loosening. From this we
forecast that 80-90% of the energy going into conventional method is there to repair the damage done by large tractors.
It would be much better to not cause compaction in the beginning which is one of the reasons that leads us to consider
using small light machines. If this approach were taken, it would appear that the crop production cycle could be reduced to
three stages: Seeding, Plant care and (selective) harvesting. A micro spray system is currently under development at DIAS
Bygholm, in Denmark. Traditional or macro spraying can be very efficient, especially when they cover large areas.
Most equipment manufacturers are developing larger machines, with 42 meter booms currently under development
(pers. com. Hardi International). When mounting booms this big, they have inherent stability problems as the tractor has a
relatively small wheelbase and they tend to oscillate. One method to improve stability would be to mount a spray boom
between two unmanned robots that travelled in adjacent tramlines. This robotic gantry could apply both liquid sprays and
fertiliser and be able to regulate itself according to current weather conditions. If it became too windy then the gantry could
just stop and wait until conditions improved. Variable rate, patch spraying, minimizing.skips and overlaps could all be built
into the original design specifications by controlling individual nozzles. Turning on the headland would be different, as it
would not include rotation just translation, as the robots could turn but the boom remains parallel to its working direction.
Sensing systems could be mounted on a trolley that could move along the spray boom as in the crop scouting section
ROBOTIC IRRIGATION
A robotic irrigator in the form of a mechatronic sprinkler (to simulate a travelling rain gun) was developed to
apply variable rates of water and chemigation to predefined areas. The trajectory and sector angles of the jet were
controlled by stepper motors and could be adjusted according the current weather and the desired pattern by a small
computer
When the airborne water was blown down wind, the jet angles could be adjusted to compensate by measuring the
instantaneous wind speed and direction (Turker et al. 1998). This system could not only apply the required water in the
right place but could irrigate into field corners
SELECTIVE HARVESTING
Selective harvesting involves the concept of only harvesting those parts of the crop that meet certain quality
thresholds. It can be considered to be a type of pre sorting based on sensory perception. Examples are to only harvest
barley below a fixed protein content or combine grain that is dry enough (and leave the rest to dry out) or to select and
harvest fruits and vegetables that meet a size criteria. As these criteria often attract quality premiums, increased economic
returns could justify the additional sensing
To be able to carry out selective harvesting effectively, two criteria are needed; the ability to sense the quality
factor before harvest and the ability to harvest the product of interest without damaging the remaining crop.
Most agricultural equipment is getting bigger and hence not suited for this approach. Smaller more versatile selective
harvesting equipment is needed. Either the crop can be surveyed before harvest so that the information needed about where
the crop of interest is located, or that the harvester may have sensors mounted that can ascertain the crop condition.
38
Charansingh A. Patil & Sunil U. Nyati
The selective harvester can then harvest that crop that is ready, while leaving the rest to mature, dry, or ripen etc
Alternatively, small autonomous whole crop harvesters could be used to selectively gather the entire crop from a
selected area and transport it to a stationary processing system that could clean, sort and maybe pack the produce. This is
not a new idea, but updating a system that used stationary threshing machines from many years ago. Alternatively a
stripper header could be used to only gather the cereal heads and send them for threshing
CONCLUSIONS
Now a days every where a common technology will be used but in this type of agricultural resurch study it will
be something different result provide by useing this multifunctional robot.In this study has group out a vision of how
aspects of crop generation could be automated one. Although exist manned operations can be sufficiant over big area there
is a potential for decricing the scale of remedy with autonomous robots that may result in even higher capable & efficient.
The manufacturer process may be raising but the overall concept requires a paradigm shift in the way we think about
mechanisation for crop production that is based more on plant needs and novel ways of encounter them rather than
developed existing methodology & technology
REFERENCES
1.
Bak, T. and Jakobsen, H. 2003, Agricultural Robotic Platform with Four Wheel Steering for Weed Detection.
Biosystems Engineering 87:2125-136
2.
Blackmore, B. S., Fountas, S., Tang, L., and Have, H. 2004a, Design specifications for a small autonomous tractor
with behavioural control, The CIGR Journal of AE Scientific Research and Development http://cigrejournal.tamu.edu/Volume6.html:Manuscript PM 04 00
3.
Blackmore, B. S., Fountas, S., Vougioukas, S., Tang, L., Srensen, C. G., and Jrgensen, R. 2004b,
Decomposition of agricultural tasks into robotic behaviours, The CIGR Journal of AE Scientific Research and
Development In Press
4.
Chamen, W. C. T., Dowler, D., Leede, P. R., and Longstaff, D. J. 1994, Design, operation and performance of a
gantry system: Experience in arable cropping, Journal of Agricultural Engineering Research 59:145-60
5.
Chengliang Liu, Mingjun Wang, and Jun Zhou (2008), coordinating control for an agricultural vehicle with
individual wheel speeds and steering angles, IEEE control systems magazine
6.
Solar cell operation and modeling, DragicaVasileska, ASU Gerhard Klimeck, Purdue
7.
Madsen TE, Jakobsen HL (2001). Mobile Robot for Weeding, Unpublished MSc. thesis Danish Technical
University
8.
Pedersen BB (2001). Weed density estimation from digital images in spring barley, Unpublished MSc thesis
KVL, Denmark
9.
Shibusawa S (1996). PhytoTechnology - An introduction to the concept and topic of a new project,
http://phytech.ishikawa-c.ac.jp/WhatIs.html
10. Sgaard HT, Heisel T (2002). Weed classification by active shape models. AgEng 2002, International Conference
on Agricultural Engineering, Budapest, Hungary, June-July 2002
11. Tang L, Tian L, Steward BL (2000). Color image segmentation with genetic algorithm for in-field weed sensing,
Survey on Multifunctional Robotic Vehicle for Agriculture Application
Transactions of the ASAE - American Society of Agricultural Engineers 43:41019-1028
39
Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Interchip InterconnectionsDocumento6 páginasInterchip InterconnectionsBESTJournalsAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Predictive Analytics Using Big Data: A SurveyDocumento8 páginasPredictive Analytics Using Big Data: A SurveyBESTJournalsAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- A Way To Improve One's Academic PerformanceDocumento7 páginasA Way To Improve One's Academic PerformanceBESTJournalsAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- A Study of Consumer Behavior Pattern For Select Eye-Care Facilities in Vashi and Koparkhairne, Navi MumbaiDocumento14 páginasA Study of Consumer Behavior Pattern For Select Eye-Care Facilities in Vashi and Koparkhairne, Navi MumbaiBESTJournalsAinda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Humanities - A COMPARATIVE STUDY - Dr. MUKESH KUMAR PANTH PDFDocumento10 páginasHumanities - A COMPARATIVE STUDY - Dr. MUKESH KUMAR PANTH PDFBESTJournalsAinda não há avaliações
- Humanities-A STUDY ON CURRICULUM DEVELOPMENT-Kashefa Peerzada PDFDocumento8 páginasHumanities-A STUDY ON CURRICULUM DEVELOPMENT-Kashefa Peerzada PDFBESTJournalsAinda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Management-The Enmity in Gen 3-15 - DR - Afolarin Olutunde OjewoleDocumento12 páginasManagement-The Enmity in Gen 3-15 - DR - Afolarin Olutunde OjewoleBESTJournalsAinda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Humanities-Glimpses Of-Dr - Vitthal v. ParabDocumento10 páginasHumanities-Glimpses Of-Dr - Vitthal v. ParabBESTJournalsAinda não há avaliações
- Humanities-Low Dose Gonadotropin Protocol For Ovulation Induction in Low Resource Centre-Dr A. I. IsawumiDocumento8 páginasHumanities-Low Dose Gonadotropin Protocol For Ovulation Induction in Low Resource Centre-Dr A. I. IsawumiBESTJournalsAinda não há avaliações
- Management-Finding Number of Furnaces - Basant KashyaDocumento10 páginasManagement-Finding Number of Furnaces - Basant KashyaBESTJournalsAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Binary Decimal HexDocumento7 páginasBinary Decimal Hex666667Ainda não há avaliações
- ASNZS1576 Scaffolding+General+RequirementsDocumento69 páginasASNZS1576 Scaffolding+General+RequirementsMuhammad AfiqAinda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Members List 08.04.2017 Updated. No Pseudo MbrsDocumento165 páginasMembers List 08.04.2017 Updated. No Pseudo Mbrsaroravikas100% (2)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- FIDIC Clause: Delegation of The Engineer'S Authority Revision: ? DateDocumento6 páginasFIDIC Clause: Delegation of The Engineer'S Authority Revision: ? DateTomoe GozenAinda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Semple Material TagingDocumento4 páginasSemple Material Tagingppg.desyaalfatih82Ainda não há avaliações
- Business Process Reengineering: M. Parthiban Dept of Mech EngineeringDocumento60 páginasBusiness Process Reengineering: M. Parthiban Dept of Mech Engineeringgiri123aeroAinda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- E-Learning Resource LocatorDocumento6 páginasE-Learning Resource LocatorNishant KumarAinda não há avaliações
- Chapter 9 Mediums of MusicDocumento70 páginasChapter 9 Mediums of MusicAileen Bisnar65% (17)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- MG Engine HistoryDocumento86 páginasMG Engine HistoryDamian RoweAinda não há avaliações
- Technical Note An Investigation On The Causes of A Rotor Bending and Its Thermal StraighteningDocumento10 páginasTechnical Note An Investigation On The Causes of A Rotor Bending and Its Thermal Straighteningsemarasik_651536604Ainda não há avaliações
- Photometer AL400 & AL410: Modern, Mobile Photometers For Rapid, Reliable Water TestingDocumento4 páginasPhotometer AL400 & AL410: Modern, Mobile Photometers For Rapid, Reliable Water TestingTan NguyenAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Catalog 4135 - Check Valves, Filters and Relief ValvesDocumento60 páginasCatalog 4135 - Check Valves, Filters and Relief ValvesFederico MoranAinda não há avaliações
- The Airborne ISR Market 2013-2023 PDFDocumento24 páginasThe Airborne ISR Market 2013-2023 PDFVisiongainGlobal100% (1)
- Fujitsu Lifebook A530 Notebook: DatasheetDocumento6 páginasFujitsu Lifebook A530 Notebook: DatasheetnirwalamitAinda não há avaliações
- Terex 860B Drive Train and BrakesDocumento155 páginasTerex 860B Drive Train and BrakesPablo Mora100% (4)
- Store 2Documento19 páginasStore 2aymanAinda não há avaliações
- Bomba Pioner - ManualDocumento29 páginasBomba Pioner - ManualRodrigoArayaAinda não há avaliações
- HRISDocumento13 páginasHRISAkash BansalAinda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Dietmar Hildenbrand-Foundations of Geometric Algebra ComputingDocumento199 páginasDietmar Hildenbrand-Foundations of Geometric Algebra ComputingGuillermo Osuna100% (2)
- Hydraulic Design For Gravity Based Water Schemes Publication 2014Documento29 páginasHydraulic Design For Gravity Based Water Schemes Publication 2014Anonymous M0tjyWAinda não há avaliações
- VRNG V Zte 7152015Documento55 páginasVRNG V Zte 7152015iphawkAinda não há avaliações
- Elevators TechnologyDocumento25 páginasElevators Technologyengineer63Ainda não há avaliações
- Integrated Management Systems Manual Without Company RefDocumento17 páginasIntegrated Management Systems Manual Without Company ReflkjhiuhAinda não há avaliações
- Gervasoni - PratoDocumento98 páginasGervasoni - PratoMiguel García FernándezAinda não há avaliações
- API Valves Standards PDFDocumento1 páginaAPI Valves Standards PDFDodi SuhendraAinda não há avaliações
- Mangesh PatilDocumento3 páginasMangesh Patilcrushboy18Ainda não há avaliações
- Note Number Frequency TableDocumento7 páginasNote Number Frequency TablemreijAinda não há avaliações
- Quick Start Guide Guía de Inicio Rápido: TH-46PZ850U TH-50PZ850UDocumento66 páginasQuick Start Guide Guía de Inicio Rápido: TH-46PZ850U TH-50PZ850Ujeffreyspeck7119Ainda não há avaliações
- ECO Disc TS2 Spare-Parts-Information BPW en 2019Documento82 páginasECO Disc TS2 Spare-Parts-Information BPW en 2019cursor10Ainda não há avaliações
- 2801 Pep CL01 10001Documento77 páginas2801 Pep CL01 10001mileperez78100% (2)