Você também pode gostar
- SOLDAGEM - PROCESSOS E METALURGIA (Emílio Wainer, Sérgio Brandi e Fábio Décourt Homem de Mello) PDFDocumento506 páginasSOLDAGEM - PROCESSOS E METALURGIA (Emílio Wainer, Sérgio Brandi e Fábio Décourt Homem de Mello) PDFMacdonald Emmanuel33% (3)
- Av1-Cálculo Vetorial e Edo PDFDocumento4 páginasAv1-Cálculo Vetorial e Edo PDFSidverlygmail.com Verly0% (1)
- Catálogo ParafusosDocumento27 páginasCatálogo ParafusosRomulo AlvesAinda não há avaliações
- Definição e aplicações da cerâmicaDocumento9 páginasDefinição e aplicações da cerâmicaRonaldo JuniorAinda não há avaliações
- Comparativo CorteDocumento23 páginasComparativo CorteRonaldo JuniorAinda não há avaliações
- Nitretação a Plasma: Fundamentos e AplicaçõesDocumento109 páginasNitretação a Plasma: Fundamentos e AplicaçõesoldjanusAinda não há avaliações
- Aut IndDocumento130 páginasAut IndBacamarteAinda não há avaliações
- Aula 02 Capitulo 01 Callister - IntroduçãoDocumento32 páginasAula 02 Capitulo 01 Callister - IntroduçãoRonaldo JuniorAinda não há avaliações
- Termodinâmica Aplicada - Exame EE SV 1718Documento2 páginasTermodinâmica Aplicada - Exame EE SV 1718Duarte MotaAinda não há avaliações
- Eletrodomesticos Aulas Conserto e Manutencao 1Documento107 páginasEletrodomesticos Aulas Conserto e Manutencao 1Wilson WatariAinda não há avaliações
- PPRA - Programa de Prevenção de Riscos Ambientais na NR 9Documento29 páginasPPRA - Programa de Prevenção de Riscos Ambientais na NR 9Geison C. Alves100% (2)
- OSIFICACAO DA DISCIPLINA DE FÍSICA 8a CLASSE I TRIMESTRE 2022Documento5 páginasOSIFICACAO DA DISCIPLINA DE FÍSICA 8a CLASSE I TRIMESTRE 2022Edmundo Cardoso CardosoAinda não há avaliações
- TCC ATP Simulador CircuitosDocumento145 páginasTCC ATP Simulador CircuitosjosejesusthomazAinda não há avaliações
- Ligação metálica: propriedades e teoriasDocumento6 páginasLigação metálica: propriedades e teoriasMango lavoAinda não há avaliações
- Técnicas de extração forense de telefones celularesDocumento1 páginaTécnicas de extração forense de telefones celularesAnderson DomusAinda não há avaliações
- Como calcular e enrolar pequenos indutoresDocumento8 páginasComo calcular e enrolar pequenos indutoresAlexandre Gandra CarvalhoAinda não há avaliações
- Uma análise da abordagem de Reggio Emilia na educação infantil brasileiraDocumento24 páginasUma análise da abordagem de Reggio Emilia na educação infantil brasileiraTati KhamisAinda não há avaliações
- Re Port5 Bancoquestoes Enl Jan19Documento10 páginasRe Port5 Bancoquestoes Enl Jan19Eva PintoAinda não há avaliações
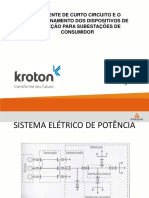
- Dimensionamento de Proteção para Subestações de ConsumidoresDocumento28 páginasDimensionamento de Proteção para Subestações de ConsumidoresMailso Maciel100% (1)
- Agentes Físicos Temperaturas ExtremasDocumento72 páginasAgentes Físicos Temperaturas ExtremasgauchoprAinda não há avaliações
- Aurora TrigueirinhoDocumento190 páginasAurora TrigueirinhoGisele KlobukoskiAinda não há avaliações
- Case: PONTE SADocumento4 páginasCase: PONTE SAkrikacz100% (6)
- A INFLUÊNCIA DAS PRÁTICAS CORPORAIS NAS DOENÇAS CRôNICO-DEGENERATIVASDocumento33 páginasA INFLUÊNCIA DAS PRÁTICAS CORPORAIS NAS DOENÇAS CRôNICO-DEGENERATIVASLenilson silas batistaAinda não há avaliações
- Eletrostática 21 - Trabalho Da Força ElétricaDocumento5 páginasEletrostática 21 - Trabalho Da Força ElétricaLeonardo MardeganAinda não há avaliações
- Potencial Elétrico: Trabalho, Energia Potencial, Superfícies EquipotenciaisDocumento26 páginasPotencial Elétrico: Trabalho, Energia Potencial, Superfícies EquipotenciaisPatricia SilvaAinda não há avaliações
- Lista de Exercícios 1Documento2 páginasLista de Exercícios 1Higor BaykerAinda não há avaliações
- Instituto Aocp 2019 See PB Professor Educacao Fisica ProvaDocumento15 páginasInstituto Aocp 2019 See PB Professor Educacao Fisica ProvaLeonardo PimentelAinda não há avaliações
- Resistência dos materiais - Lista 01Documento8 páginasResistência dos materiais - Lista 01jadocb1Ainda não há avaliações
- Teoria Da Energia de Distorção MáximaDocumento34 páginasTeoria Da Energia de Distorção MáximaJackeline SantosAinda não há avaliações
- Comunicações ÓpticasDocumento6 páginasComunicações ÓpticasMatheus Alves FreitasAinda não há avaliações
- Unidade 08 PDFDocumento11 páginasUnidade 08 PDFJúlio C. S. WatanabeAinda não há avaliações
- A educação da vontade e o trabalho intelectualDocumento264 páginasA educação da vontade e o trabalho intelectualEdi Carlos Silva100% (2)
- Motores Elétricos - RobóticaDocumento37 páginasMotores Elétricos - RobóticaTorus EngenhariaAinda não há avaliações
- Resistência e ResistividadeDocumento7 páginasResistência e ResistividadeMark RochaAinda não há avaliações
- Roteiro Dicado ProfessorDocumento3 páginasRoteiro Dicado ProfessorRoberta LemesAinda não há avaliações
- Cespe 2016 Policia Cientifica Pe Perito Criminal Quimica ProvaDocumento14 páginasCespe 2016 Policia Cientifica Pe Perito Criminal Quimica ProvaThiago FagundesAinda não há avaliações
- Equipamentos de RadiologiaDocumento24 páginasEquipamentos de RadiologiaRones CarvalhoAinda não há avaliações