Você também pode gostar
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Ainda não há avaliações
- B0643042212Documento12 páginasB0643042212marvel homesAinda não há avaliações
- 006 I2C Bus ProtocolDocumento16 páginas006 I2C Bus Protocolcoolkunal77100% (1)
- Design I2c Spi On AMBA BUSDocumento4 páginasDesign I2c Spi On AMBA BUSzy798408818Ainda não há avaliações
- I2CDocumento6 páginasI2CGovinda RaoAinda não há avaliações
- Inter Integrated Circuit Implementation and ApplicationDocumento34 páginasInter Integrated Circuit Implementation and ApplicationAshokSiri100% (1)
- 4 - Design of I2C Master Core With AHB Protocol For High Performance InterfaceDocumento72 páginas4 - Design of I2C Master Core With AHB Protocol For High Performance Interfacevsangvai26Ainda não há avaliações
- Exploring I2cDocumento6 páginasExploring I2cspyeagleAinda não há avaliações
- I2C Interfacing To XC3S400 FPGADocumento14 páginasI2C Interfacing To XC3S400 FPGAMahesh BhatkalAinda não há avaliações
- FPGA Implementation of I C & SPI Protocols: A Comparative StudyDocumento4 páginasFPGA Implementation of I C & SPI Protocols: A Comparative StudyjanepriceAinda não há avaliações
- Serial Interfaces PDFDocumento55 páginasSerial Interfaces PDFGaurav GrimReaper Roy100% (1)
- An Implementation of I2C Slave Interface Using Verilog HDLDocumento6 páginasAn Implementation of I2C Slave Interface Using Verilog HDLIJMERAinda não há avaliações
- Implementing Communication Bridge Between I2C and APBDocumento4 páginasImplementing Communication Bridge Between I2C and APBDon RajuAinda não há avaliações
- EE6008 Unit 3Documento8 páginasEE6008 Unit 3TakeItEasyDude TIEDAinda não há avaliações
- I2CMB Core for Interfacing I2C Buses with Avalon Memory Mapped InterfaceDocumento5 páginasI2CMB Core for Interfacing I2C Buses with Avalon Memory Mapped InterfaceKumars tiwariAinda não há avaliações
- Design and Implementation of I2C Bus Protocol On Fpga Using Verilog For EepromDocumento5 páginasDesign and Implementation of I2C Bus Protocol On Fpga Using Verilog For EepromRohail AhmedAinda não há avaliações
- 8 Design of BISTDocumento54 páginas8 Design of BISTvsangvai26Ainda não há avaliações
- FpgaDocumento6 páginasFpgaÁryâñ SinghAinda não há avaliações
- ASSIGNMENT 1 (Embd&IOmT)Documento9 páginasASSIGNMENT 1 (Embd&IOmT)rakesh.jAinda não há avaliações
- Design of Efficient AMBA AHB ArbiterDocumento9 páginasDesign of Efficient AMBA AHB ArbiterVennapoosa Hemanth Kumar ReddyAinda não há avaliações
- Principle of I2C Bus and Its Application in IC Design: Li Yifan, Mo FeiDocumento9 páginasPrinciple of I2C Bus and Its Application in IC Design: Li Yifan, Mo FeiPronadeep BoraAinda não há avaliações
- I2C/SPI Host Adapter.Documento63 páginasI2C/SPI Host Adapter.sruiz7100% (2)
- I C-Bus Specification and User ManualDocumento50 páginasI C-Bus Specification and User ManualAll4UyenAinda não há avaliações
- Single Chip Solution: Implementation of Soft Core Microcontroller Logics in FPGADocumento4 páginasSingle Chip Solution: Implementation of Soft Core Microcontroller Logics in FPGAInternational Organization of Scientific Research (IOSR)Ainda não há avaliações
- SPI Vs I2C Vs UART - What Are The Differences Between These ProtocolsDocumento10 páginasSPI Vs I2C Vs UART - What Are The Differences Between These ProtocolsjackAinda não há avaliações
- I2c-Apb BridgeDocumento6 páginasI2c-Apb BridgeVarun PAinda não há avaliações
- CENG507 Fall2020 Chap5Documento42 páginasCENG507 Fall2020 Chap5Anonymous phisherAinda não há avaliações
- Serial InterfacesDocumento31 páginasSerial InterfacesNishanthAinda não há avaliações
- Debugging Serial BusesDocumento40 páginasDebugging Serial Busessatian_aAinda não há avaliações
- Computer Multitasking Real-Time ComputingDocumento3 páginasComputer Multitasking Real-Time ComputingAlazar DInberuAinda não há avaliações
- Unit 3Documento56 páginasUnit 3TakeItEasyDude TIEDAinda não há avaliações
- I2C - Learn - SparkfunDocumento6 páginasI2C - Learn - SparkfunyuvarajnarayanasamyAinda não há avaliações
- Introduction I2c and SPIDocumento14 páginasIntroduction I2c and SPIHaris Jeelani100% (1)
- Application Specific Integrated Circuits (ASICs) Design ProcessDocumento26 páginasApplication Specific Integrated Circuits (ASICs) Design ProcessRamesh LakshmananAinda não há avaliações
- Lab 8 - I2CDocumento7 páginasLab 8 - I2CNhi MẫnAinda não há avaliações
- FSM implementation of I2C protocol and its verification using verilogDocumento3 páginasFSM implementation of I2C protocol and its verification using verilogyogiyogi7474Ainda não há avaliações
- Aardvark v5.11Documento69 páginasAardvark v5.11Yogesh KumarAinda não há avaliações
- VHDL Tutorial-Part 1-Adc-SpiDocumento7 páginasVHDL Tutorial-Part 1-Adc-Spihieuhuech1Ainda não há avaliações
- Martinj NCP3101 A9Documento3 páginasMartinj NCP3101 A9Jeriel Miguel MartinAinda não há avaliações
- 20 C++ ATmega I2C Serial CommDocumento14 páginas20 C++ ATmega I2C Serial CommAnatronics LabAinda não há avaliações
- Amba SocDocumento84 páginasAmba SocVarun ChauhanAinda não há avaliações
- Guide To Cisco Router ConfigurationDocumento27 páginasGuide To Cisco Router ConfigurationBulbula KumedaAinda não há avaliações
- Debugging Low-Speed Serial Buses in Embedded System DesignsDocumento16 páginasDebugging Low-Speed Serial Buses in Embedded System Designstennis5luvAinda não há avaliações
- Inter-Integrated Circuit (I2C) : Karthik Hemmanur ECE 480-Design Team 3 Fall 2009Documento8 páginasInter-Integrated Circuit (I2C) : Karthik Hemmanur ECE 480-Design Team 3 Fall 2009gluciferAinda não há avaliações
- Designing A WISHBONE Protocol Network Adapter For An Asynchronous Network-on-ChipDocumento7 páginasDesigning A WISHBONE Protocol Network Adapter For An Asynchronous Network-on-ChipAnji KumarAinda não há avaliações
- C CCC CCC C CC C CDocumento6 páginasC CCC CCC C CC C CMd Rizwan AhmadAinda não há avaliações
- UART/USART, SPI, I C Features and ApplicationsDocumento5 páginasUART/USART, SPI, I C Features and ApplicationsVishal Kottarathil100% (2)
- Lab # 03 I2C WriteDocumento4 páginasLab # 03 I2C WriteSOBAN KHANAinda não há avaliações
- Cisco UCS Cards To Study For DCUCI Exam-1Documento17 páginasCisco UCS Cards To Study For DCUCI Exam-1Srinivas KumarAinda não há avaliações
- Computing Machinery: Chapter 10: MicrocontrollersDocumento51 páginasComputing Machinery: Chapter 10: MicrocontrollersAkanksha SrivastavaAinda não há avaliações
- Arm I2cDocumento25 páginasArm I2cNarendra SvAinda não há avaliações
- VST Case StudyDocumento9 páginasVST Case StudyBobby NelsonAinda não há avaliações
- 13&15 MarksDocumento9 páginas13&15 MarksFranklin AlexAinda não há avaliações
- System On A Chip Design - The Future of VlsiDocumento11 páginasSystem On A Chip Design - The Future of Vlsiapi-20008301Ainda não há avaliações
- An Implementation of Open Core Protocol For The On-Chip Bus: CH - Suryanarayana, M.Vinodh KumarDocumento4 páginasAn Implementation of Open Core Protocol For The On-Chip Bus: CH - Suryanarayana, M.Vinodh Kumarsivakumarb92Ainda não há avaliações
- SPI Implementation On FPGADocumento3 páginasSPI Implementation On FPGAshivgnitAinda não há avaliações
- A Rapid Prototyping Environment For Microprocessor Based System-on-Chips and Its Application To The Development of A Network ProcessorDocumento4 páginasA Rapid Prototyping Environment For Microprocessor Based System-on-Chips and Its Application To The Development of A Network ProcessorSamAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- The Energy Pairs TheoryDocumento8 páginasThe Energy Pairs TheorymsejjournalAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- Mighty Macros and Powerful Parameters: Maximizing Efficiency and Flexibility in HDL ProgrammingDocumento18 páginasMighty Macros and Powerful Parameters: Maximizing Efficiency and Flexibility in HDL ProgrammingAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of Electromagnetics (IJEL)Documento2 páginasInternational Journal of Electromagnetics (IJEL)ijeljournalAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI Design & Communication Systems (VLSICS)Documento1 páginaInternational Journal of VLSI Design & Communication Systems (VLSICS)Anonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSIdesign & Communication Systems (VLSICS)Documento1 páginaInternational Journal of VLSIdesign & Communication Systems (VLSICS)Anonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- International Journal of VLSI DesignDocumento1 páginaInternational Journal of VLSI DesignAnonymous e4UpOQEPAinda não há avaliações
- ES PaperDocumento22 páginasES PaperRaghu Nath SinghAinda não há avaliações
- 4 M.sc. I & II PhyscisDocumento75 páginas4 M.sc. I & II PhyscisPoonam SinhaAinda não há avaliações
- Twido TWDLCAE40DRFDocumento3 páginasTwido TWDLCAE40DRFCarlos Tito MoyaAinda não há avaliações
- Step-Down DC-DC Converter PDFDocumento8 páginasStep-Down DC-DC Converter PDFGenetic JohnAinda não há avaliações
- Kenwood AG 203 Service ManualDocumento18 páginasKenwood AG 203 Service ManualJose PimentaAinda não há avaliações
- Analog Applications Journal TI Slyt486Documento38 páginasAnalog Applications Journal TI Slyt486thietdaucongAinda não há avaliações
- Lab Automation Based On IOTDocumento6 páginasLab Automation Based On IOTIJRASETPublicationsAinda não há avaliações
- Tuv Rheinland Bifacial Photovoltaic Modules and SystemsDocumento166 páginasTuv Rheinland Bifacial Photovoltaic Modules and SystemsDavid GarciaAinda não há avaliações
- Design of Low Pass Filter Using Sun-Shaped ResonatorDocumento9 páginasDesign of Low Pass Filter Using Sun-Shaped ResonatorkhyatichavdaAinda não há avaliações
- Physics Paper 1Documento28 páginasPhysics Paper 1AbhishekGuptaSarmaAinda não há avaliações
- HVDC Thesis Mtech Iit Hyd PDFDocumento77 páginasHVDC Thesis Mtech Iit Hyd PDFN R SHEKARAinda não há avaliações
- Electronics and Sensors - Reflective SensorsDocumento1 páginaElectronics and Sensors - Reflective SensorsHIDRAFLUIDAinda não há avaliações
- Split-Phase Control Achieving Complete Soft-Charging Operation of A Dickson Switched-Capacitor ConverterDocumento3 páginasSplit-Phase Control Achieving Complete Soft-Charging Operation of A Dickson Switched-Capacitor ConverterLeMeniz InfotechAinda não há avaliações
- 2019 08 21 - Program) OptilasDocumento90 páginas2019 08 21 - Program) OptilasIvan MontesAinda não há avaliações
- Mems Microphone ReviewDocumento9 páginasMems Microphone ReviewShim HahngAinda não há avaliações
- Lect 04 Diodes and Applications - Part1Documento71 páginasLect 04 Diodes and Applications - Part1Sebastian GilAinda não há avaliações
- Digital Design Interview QuestionsDocumento25 páginasDigital Design Interview Questionsmanohar487Ainda não há avaliações
- Toshiba E-Studio 2505H Manual ServiceDocumento573 páginasToshiba E-Studio 2505H Manual ServiceMiguel AngelAinda não há avaliações
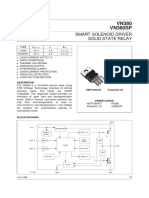
- VN380 Smart Solenoid Driver SpecificationsDocumento10 páginasVN380 Smart Solenoid Driver SpecificationsAdan Pérez EchevarríaAinda não há avaliações
- Mixed-Signal-Electronics: PD Dr.-Ing. Stephan HenzlerDocumento33 páginasMixed-Signal-Electronics: PD Dr.-Ing. Stephan HenzlerAhmed HamoudaAinda não há avaliações
- Experimental Report on the Behaviour of Zener Diodes in Forward and Reverse BiasDocumento9 páginasExperimental Report on the Behaviour of Zener Diodes in Forward and Reverse BiasDadAinda não há avaliações
- PE Lecture No.15Documento5 páginasPE Lecture No.15yemane gebremichalAinda não há avaliações
- Chill Testing of Cast IronDocumento2 páginasChill Testing of Cast IronSachin Kumbhar100% (1)
- Computer processor history: From silicon discovery to modern CPUsDocumento8 páginasComputer processor history: From silicon discovery to modern CPUscoep05Ainda não há avaliações
- K1JD Homebrew Amplifier v1.0Documento10 páginasK1JD Homebrew Amplifier v1.0Manuel Costa MoreiraAinda não há avaliações
- ERW and HF Welding Techniques ComparedDocumento35 páginasERW and HF Welding Techniques ComparedLuka BugarinAinda não há avaliações
- Transactions On Electrical and Electronic MaterialsDocumento8 páginasTransactions On Electrical and Electronic Materialsanil kawanAinda não há avaliações
- Infineon IDW80C65D2 DS v02 - 01 ENDocumento10 páginasInfineon IDW80C65D2 DS v02 - 01 ENpablo carrizoAinda não há avaliações
- Electronics and Communication Engineering PDFDocumento160 páginasElectronics and Communication Engineering PDFsindhu-aravinda9Ainda não há avaliações
- 2SB1132 BluerocketelectronicsDocumento6 páginas2SB1132 BluerocketelectronicsAno InkAinda não há avaliações