Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Understanding Human Sensors and Comparing Them With Those in A Robot (50 MINUTES)Documento28 páginasUnderstanding Human Sensors and Comparing Them With Those in A Robot (50 MINUTES)Ali KhanAinda não há avaliações
- Microprocessor & Microcontroller Lab ManualDocumento61 páginasMicroprocessor & Microcontroller Lab Manualspgmaniarunagiri100% (3)
- Final Year Project Proposal Presentation: 2k12 - SessionDocumento7 páginasFinal Year Project Proposal Presentation: 2k12 - SessionAli KhanAinda não há avaliações
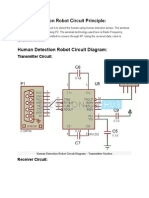
- Human Detection Robot Circuit PrincipleDocumento4 páginasHuman Detection Robot Circuit PrincipleAli KhanAinda não há avaliações
- Cs Report, Muhammad Umair, Pe-20Documento21 páginasCs Report, Muhammad Umair, Pe-20Ali KhanAinda não há avaliações
- Programmable Logic Controller (PLC) : Definition:: What Is Inside A PLC?Documento3 páginasProgrammable Logic Controller (PLC) : Definition:: What Is Inside A PLC?Ali KhanAinda não há avaliações
- Asif KhanDocumento2 páginasAsif KhanAli KhanAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Group - 2 - Auto Lab 3 - Exp 2 - Analysis of An Closed-Loop SystemDocumento12 páginasGroup - 2 - Auto Lab 3 - Exp 2 - Analysis of An Closed-Loop SystemArief YazidAinda não há avaliações
- History of System DevelopmentDocumento7 páginasHistory of System DevelopmentfigormsAinda não há avaliações
- Simulated Annealing: Rohit Man AmatyaDocumento21 páginasSimulated Annealing: Rohit Man Amatyathe.nubeAinda não há avaliações
- dc01 Show - PpsDocumento49 páginasdc01 Show - Ppsscribdacct123Ainda não há avaliações
- Instrumentation & Process Control Fundamentals: Designed By: Hossam A. HassaneinDocumento39 páginasInstrumentation & Process Control Fundamentals: Designed By: Hossam A. HassaneinKarthikeyanAinda não há avaliações
- ITCCMADocumento3 páginasITCCMACS & ITAinda não há avaliações
- Manual Testing 106 Ques.Documento11 páginasManual Testing 106 Ques.mith0% (1)
- GreedyDocumento27 páginasGreedyvishu joshiAinda não há avaliações
- Business Process ManagementDocumento28 páginasBusiness Process ManagementAhmad Tariq Bhatti100% (1)
- Signals & SystemsDocumento10 páginasSignals & SystemsBindia Handa0% (1)
- Building Management System: G. Pradeep, P. Chandra Shaker, SVS PrasadDocumento5 páginasBuilding Management System: G. Pradeep, P. Chandra Shaker, SVS PrasadjamesAinda não há avaliações
- Using Code Coverage Analysis To Focus Testing Strategies WPDocumento4 páginasUsing Code Coverage Analysis To Focus Testing Strategies WPNabila HanimAinda não há avaliações
- 227 39 Solutions Instructor Manual Chapter 1 Signals SystemsDocumento18 páginas227 39 Solutions Instructor Manual Chapter 1 Signals Systemsnaina100% (4)
- Self Balancing With Pid Control PDFDocumento7 páginasSelf Balancing With Pid Control PDFMoazam AliAinda não há avaliações
- NP Otan Bi SC Knowledge DevelopmentDocumento45 páginasNP Otan Bi SC Knowledge DevelopmentCosti MarisAinda não há avaliações
- Lecture 04 (3hrs) Neural Network and Deep Learning-Part ADocumento76 páginasLecture 04 (3hrs) Neural Network and Deep Learning-Part AEngr. Md. Borhan UddinAinda não há avaliações
- Car EvaluationDocumento33 páginasCar Evaluationbrayan0428Ainda não há avaliações
- Engineering PsychologyDocumento4 páginasEngineering PsychologyJondel Kevin MarfaAinda não há avaliações
- Nonlinear Dynamic Systems Controller Based On Blind Search AlgorithmsDocumento4 páginasNonlinear Dynamic Systems Controller Based On Blind Search AlgorithmsCesar BerciAinda não há avaliações
- BIS4225.2 - Introduction To Information Systems ArchitectureDocumento35 páginasBIS4225.2 - Introduction To Information Systems Architecturevicrattlehead2013Ainda não há avaliações
- Uts Testing Dari Mahub 2Documento9 páginasUts Testing Dari Mahub 2Rizka R0% (1)
- SDLC Interview Questions & Answers For Freshers & Experienced - SDLCDocumento4 páginasSDLC Interview Questions & Answers For Freshers & Experienced - SDLCPriyatanu Bazinga Dey100% (2)
- Apqp Activities MatrixDocumento7 páginasApqp Activities MatrixPk Nimiwal100% (1)
- RCM PresentationDocumento10 páginasRCM PresentationnicoartAinda não há avaliações
- Exploring The Impact of Artificial Intelligence On Customer ServiceDocumento11 páginasExploring The Impact of Artificial Intelligence On Customer Servicearthur guil-anAinda não há avaliações
- INTERNSHIPDocumento15 páginasINTERNSHIPRahul GumasteAinda não há avaliações
- Ooad Unit IDocumento37 páginasOoad Unit IGeetha ReddyAinda não há avaliações
- Lecture 3Documento48 páginasLecture 3Daud LuhelaAinda não há avaliações
- Mechanical Nonlin 13.0 WS 02B RestartDocumento10 páginasMechanical Nonlin 13.0 WS 02B RestartJym Genson100% (1)
- CH4 - SS Model - Reduction BD - Signal Flow Graph - Control Theory - 2020-2021 - Semester01 - DR - HoroubDocumento144 páginasCH4 - SS Model - Reduction BD - Signal Flow Graph - Control Theory - 2020-2021 - Semester01 - DR - HoroubAnna BrookeAinda não há avaliações