Você também pode gostar
- REU615 3.0 PG Rus PDFDocumento49 páginasREU615 3.0 PG Rus PDFВалерий ОконскийAinda não há avaliações
- RED615 3.0 PG RusDocumento57 páginasRED615 3.0 PG RusВалерий ОконскийAinda não há avaliações
- 11Documento14 páginas11Валерий ОконскийAinda não há avaliações
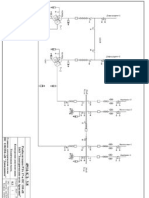
- 3.8 Davit Ashen Single Line Diagramm ModelDocumento1 página3.8 Davit Ashen Single Line Diagramm ModelВалерий ОконскийAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Metal Cutting SourceDocumento24 páginasMetal Cutting SourceSamAinda não há avaliações
- BP104 Data SheetsDocumento5 páginasBP104 Data SheetssegalignoAinda não há avaliações
- Physics 5054 P2 Complete Electricity Topical Past Paper (Only Questions)Documento183 páginasPhysics 5054 P2 Complete Electricity Topical Past Paper (Only Questions)Manthan ChakrabortyAinda não há avaliações
- REM615 - MotorDocumento60 páginasREM615 - Motorthiagodorockk100% (1)
- WK 01Documento328 páginasWK 01Gaye VillapandoAinda não há avaliações
- Magnetically Coupled CircuitsDocumento21 páginasMagnetically Coupled CircuitsIftitah ImawatiAinda não há avaliações
- 2014-02 TestingCathodicProtectionSystems Slides 508Documento49 páginas2014-02 TestingCathodicProtectionSystems Slides 508shejin R.SAinda não há avaliações
- Huawei BTS3900A Installation Guide V1.0Documento29 páginasHuawei BTS3900A Installation Guide V1.0Ganidu Rochana100% (2)
- MEMOREX mt1194Documento30 páginasMEMOREX mt1194Saul ArriagaAinda não há avaliações
- Lecture Notes - Power Electronics PDFDocumento197 páginasLecture Notes - Power Electronics PDFM.T. KadamAinda não há avaliações
- SYNCHRONOUS MOTORS - Electrical Engineering Interview Questions and AnswersDocumento21 páginasSYNCHRONOUS MOTORS - Electrical Engineering Interview Questions and AnswersBryanOviedoAinda não há avaliações
- Design and Implementation of I2C Bus Protocol On Fpga Using Verilog For EepromDocumento5 páginasDesign and Implementation of I2C Bus Protocol On Fpga Using Verilog For EepromRohail AhmedAinda não há avaliações
- Ibwave V 6.5.3Documento38 páginasIbwave V 6.5.3Idoga Meshach Ameh100% (1)
- SN 14 Lab Manual CO1Documento8 páginasSN 14 Lab Manual CO1prateekbansalxcAinda não há avaliações
- Broadband Networks Prof. Dr. Abhay Karandikar Electrical Engineering Department Indian Institute of Technology, Bombay Lecture - 29 Voice Over IPDocumento22 páginasBroadband Networks Prof. Dr. Abhay Karandikar Electrical Engineering Department Indian Institute of Technology, Bombay Lecture - 29 Voice Over IPKrishna GhimireAinda não há avaliações
- 1746894Documento3 páginas1746894Marius BudauAinda não há avaliações
- L-15 Solved Numericals On DC MotorDocumento2 páginasL-15 Solved Numericals On DC MotorBSNL TRANSMISSION kathuaAinda não há avaliações
- High Speed Centrifuge, 1248R - Service ManualDocumento40 páginasHigh Speed Centrifuge, 1248R - Service ManualTalhaAinda não há avaliações
- Checking Data, I-CANDocumento3 páginasChecking Data, I-CANWaldek KozlowskiAinda não há avaliações
- High-Voltage Amplifier Transistor (120V, 50ma) : 2SC4102 / 2SC3906K / 2SC2389SDocumento3 páginasHigh-Voltage Amplifier Transistor (120V, 50ma) : 2SC4102 / 2SC3906K / 2SC2389SYüksel DoğrulAinda não há avaliações
- TimemjimpsecondsemDocumento2 páginasTimemjimpsecondsemSundar SharathAinda não há avaliações
- Ceina Optical Metro 5100 5200 For Service Providers DSDocumento5 páginasCeina Optical Metro 5100 5200 For Service Providers DSMohd ImranAinda não há avaliações
- PCB Land Pattern DesignsDocumento10 páginasPCB Land Pattern DesignsGabriel SmolnyckiAinda não há avaliações
- Architecture Comparison and LCU ComparisonDocumento16 páginasArchitecture Comparison and LCU ComparisonThirukkuralkaniAinda não há avaliações
- AP-105 Wireless Access Point: Installation GuideDocumento2 páginasAP-105 Wireless Access Point: Installation GuideKalan KlAinda não há avaliações
- Ubc - 1963 - A7 S2 S7Documento90 páginasUbc - 1963 - A7 S2 S7BijuAinda não há avaliações
- E7125v1 0Documento135 páginasE7125v1 0uti12345Ainda não há avaliações
- G120 CU240BE2 BA6 0414 Eng en-USDocumento380 páginasG120 CU240BE2 BA6 0414 Eng en-USAnonymous xjn66H1Ainda não há avaliações
- Business Class M2 Workshop Manual-4Documento295 páginasBusiness Class M2 Workshop Manual-4Dinator CortésAinda não há avaliações
- Electrical QuestionsDocumento6 páginasElectrical QuestionsarupAinda não há avaliações