Você também pode gostar
- Mechanical Hazards and Machine SafeguardingDocumento19 páginasMechanical Hazards and Machine Safeguardingm_alodat6144Ainda não há avaliações
- Self Inspection CH KLT SurveyDocumento4 páginasSelf Inspection CH KLT SurveyRecel Joy ArcedeAinda não há avaliações
- Control SystemDocumento3 páginasControl SystemsryunkAinda não há avaliações
- Servo Application Lecture NotesDocumento101 páginasServo Application Lecture Notesmaduu bongsAinda não há avaliações
- Piston Pressure Switch Hydraulic-ElectricDocumento2 páginasPiston Pressure Switch Hydraulic-Electrichagg100% (1)
- Basic Electrical Safety Training (BEST)Documento73 páginasBasic Electrical Safety Training (BEST)mark magpaleAinda não há avaliações
- Forklift SafetyDocumento62 páginasForklift SafetyGunnie PandherAinda não há avaliações
- Assignment No 1: Submitted By: Jabran ShaukatDocumento3 páginasAssignment No 1: Submitted By: Jabran ShaukatJibran ShaukatAinda não há avaliações
- SG-14 Safety Guideline For Work On Electric Overhead Travelling (EOT) CraneDocumento19 páginasSG-14 Safety Guideline For Work On Electric Overhead Travelling (EOT) CraneAbhishek GadatiaAinda não há avaliações
- System Safety Rules - v4.1Documento116 páginasSystem Safety Rules - v4.1salman KhanAinda não há avaliações
- Forklift Truck/Powered Indutrial Truck: I. ObjectiveDocumento4 páginasForklift Truck/Powered Indutrial Truck: I. ObjectiveprinceAinda não há avaliações
- 4wrte Mannesmann RexrothDocumento16 páginas4wrte Mannesmann RexrothRuben Torres100% (1)
- Basic WSH Rules For Safe Forklift OperationDocumento1 páginaBasic WSH Rules For Safe Forklift OperationPrecious OladipoAinda não há avaliações
- Hand and Power Tools Safety - MCFM - DraftDocumento22 páginasHand and Power Tools Safety - MCFM - DraftEldhose Varghese100% (1)
- TPM - One Point Lesson: Suction Pump Block Valve - IDocumento1 páginaTPM - One Point Lesson: Suction Pump Block Valve - InewprocessAinda não há avaliações
- Lockout - Tagout (LOTO) Annual Inspection and Training Assessment Checklist Department: Shop: Location: EquipmentDocumento2 páginasLockout - Tagout (LOTO) Annual Inspection and Training Assessment Checklist Department: Shop: Location: EquipmentSayed Saad ShehataAinda não há avaliações
- ECE Dept Syllabus GUISTDocumento78 páginasECE Dept Syllabus GUISTparisangelAinda não há avaliações
- Safety Park BungeDocumento37 páginasSafety Park BungeRavi Sankar VenkatesanAinda não há avaliações
- Lifts and Lifting Equipment Policy and Best Practice NoteDocumento30 páginasLifts and Lifting Equipment Policy and Best Practice NoteAnsara Pasir Tumboh100% (1)
- Eis 28Documento4 páginasEis 28Ab AUAinda não há avaliações
- PV BasicsDocumento45 páginasPV Basicshagg100% (2)
- HIRADocumento7 páginasHIRAAkhilesh DubeyAinda não há avaliações
- Automatic Control Systems With MATLAB, 2nd Edition (S. Palani)Documento922 páginasAutomatic Control Systems With MATLAB, 2nd Edition (S. Palani)biobalamtechAinda não há avaliações
- FP-1 To 5Documento115 páginasFP-1 To 5jeebs0991Ainda não há avaliações
- 2021 JLG Training Catalog FinalDocumento21 páginas2021 JLG Training Catalog FinalYesica RamirezAinda não há avaliações
- LOLER Indg290Documento4 páginasLOLER Indg290Marky75Ainda não há avaliações
- 5 Machine SafetyDocumento8 páginas5 Machine SafetyCharles NunezAinda não há avaliações
- ABC's of Fall Protection: Murray State University Susan MillerDocumento24 páginasABC's of Fall Protection: Murray State University Susan MillerSam SalesAinda não há avaliações
- Stair Treads - Guidance For Industrial Use: BS/EN ISO 14122-1,2,3Documento2 páginasStair Treads - Guidance For Industrial Use: BS/EN ISO 14122-1,2,3jinyuan74Ainda não há avaliações
- Standard Operation Procedures (S.O.P) For Milling MachineDocumento1 páginaStandard Operation Procedures (S.O.P) For Milling MachineZulizudinOthmanAinda não há avaliações
- Safety in Engineering IndustryDocumento8 páginasSafety in Engineering IndustryzombieAinda não há avaliações
- Automatic Railway Gate ControllerDocumento32 páginasAutomatic Railway Gate ControllerKaos Polos NakiraAinda não há avaliações
- Segway (2 Wheel Balancing Vehicle) : Project Report: in Partial Fulfilment For The Award of TheDocumento31 páginasSegway (2 Wheel Balancing Vehicle) : Project Report: in Partial Fulfilment For The Award of ThemadhurAinda não há avaliações
- Microsoft PowerPoint - Mechanical Hazards Jan07Documento44 páginasMicrosoft PowerPoint - Mechanical Hazards Jan07Bhalvindrakumar MaranAinda não há avaliações
- ABB Ability™ System 800xaDocumento8 páginasABB Ability™ System 800xasswahyudiAinda não há avaliações
- Rexroth Safety USCOR00050Documento56 páginasRexroth Safety USCOR00050jeyakumarAinda não há avaliações
- Power AscenderDocumento6 páginasPower AscenderApriliando KurniawanAinda não há avaliações
- NGC2 Analysis of Questions Sep2009 - (Sample)Documento6 páginasNGC2 Analysis of Questions Sep2009 - (Sample)asimnaqvi2008100% (1)
- The Flow Chart of Waste Tires Recycling Pyrolysis Equipment For 8TDocumento3 páginasThe Flow Chart of Waste Tires Recycling Pyrolysis Equipment For 8Tpyrolysisoil100% (1)
- Case Study Adaptive Cruise ControlDocumento15 páginasCase Study Adaptive Cruise ControlsarathkumarAinda não há avaliações
- Pneumatic SystemDocumento28 páginasPneumatic SystemMohd FazillAinda não há avaliações
- Magnetic Proximity SwitchDocumento9 páginasMagnetic Proximity SwitchSagar ChachondiaAinda não há avaliações
- Portable Equp MNT GuideDocumento0 páginaPortable Equp MNT GuideashawishAinda não há avaliações
- Exercise PDFDocumento3 páginasExercise PDFE-zat Ilman100% (1)
- Ractical Training Seminar: Balveer Singh 132 KV G.S.S. Ultratech Cement LTDDocumento14 páginasRactical Training Seminar: Balveer Singh 132 KV G.S.S. Ultratech Cement LTDAnupriya PandeyAinda não há avaliações
- Surface Grinding Machine: Standard Operating ProcedureDocumento1 páginaSurface Grinding Machine: Standard Operating ProcedureAzreen ZainolAinda não há avaliações
- 4 Safe Practices For ElecDocumento8 páginas4 Safe Practices For ElecSandeep GuptaAinda não há avaliações
- Accii LR2Documento4 páginasAccii LR2pnsanatAinda não há avaliações
- Application Guide Twin Safe enDocumento140 páginasApplication Guide Twin Safe enCleber Martins FerrazAinda não há avaliações
- Fundamental HSE Management TrainingDocumento8 páginasFundamental HSE Management TrainingIGede SumantraAinda não há avaliações
- Mobile Working PlatformsDocumento57 páginasMobile Working Platformsmoytabura96Ainda não há avaliações
- SOP - U1400 - Road Tanker Pump Filling CO2 TankDocumento3 páginasSOP - U1400 - Road Tanker Pump Filling CO2 TankDan nathaniel gonzalesAinda não há avaliações
- MVF 5Documento5 páginasMVF 5Forum PompieriiAinda não há avaliações
- Workshop SafetyDocumento7 páginasWorkshop SafetytereveAinda não há avaliações
- Simulationandmodelingofahydraulicsystem Fluidsim Oronjak PDFDocumento5 páginasSimulationandmodelingofahydraulicsystem Fluidsim Oronjak PDFHadi NurhidayatAinda não há avaliações
- Is 15793 2007Documento14 páginasIs 15793 2007vijay_raina3114100% (1)
- Hand Pallet Truck-VL25Documento2 páginasHand Pallet Truck-VL25sutanuprojectsAinda não há avaliações
- Ergonomics Manufacturing PDFDocumento2 páginasErgonomics Manufacturing PDFKevinAinda não há avaliações
- EDPF-NT Plus Training Manual EnglishDocumento214 páginasEDPF-NT Plus Training Manual Englishtayyab zafarAinda não há avaliações
- Elevator Controller ImplementationDocumento6 páginasElevator Controller ImplementationManju Sk0% (1)
- 3.1 Mechanical HazardsDocumento4 páginas3.1 Mechanical HazardsLinda Livia AgzhataAinda não há avaliações
- SOP Endurequip HoistsDocumento7 páginasSOP Endurequip HoistsMuhammad Zefrian SyahputraAinda não há avaliações
- REBA Employee Assessment Worksheet: A. Neck, Trunk and Leg AnalysisDocumento1 páginaREBA Employee Assessment Worksheet: A. Neck, Trunk and Leg AnalysisDebora IsyanaAinda não há avaliações
- Solar Electrical Safety Presentation 1PDFDocumento34 páginasSolar Electrical Safety Presentation 1PDFblueboyAinda não há avaliações
- F001Documento6 páginasF001Leo VanAinda não há avaliações
- Basics For Updated Electrohydraulic Axis: A Due Stadi, Pilotate, Dimensioni ISO/Cetop 07 e 08Documento4 páginasBasics For Updated Electrohydraulic Axis: A Due Stadi, Pilotate, Dimensioni ISO/Cetop 07 e 08Leo VanAinda não há avaliações
- ITI - Sim: Simulation ApplicationDocumento5 páginasITI - Sim: Simulation ApplicationhaggAinda não há avaliações
- ITI - Sim: SimulationDocumento13 páginasITI - Sim: SimulationhaggAinda não há avaliações
- Servo Actuator POS 100Documento2 páginasServo Actuator POS 100haggAinda não há avaliações
- Abe32 10 2002 11 14Documento4 páginasAbe32 10 2002 11 14haggAinda não há avaliações
- Piston Pressure Switch Hydraulic-ElectricDocumento2 páginasPiston Pressure Switch Hydraulic-ElectrichaggAinda não há avaliações
- Pressure Switch For Panel Mounting: Cutout in The Panel Section A-ADocumento4 páginasPressure Switch For Panel Mounting: Cutout in The Panel Section A-AhaggAinda não há avaliações
- E Series Proportional Pressure Controls: Pilot Relief / Relief / Reducing and RelievingDocumento30 páginasE Series Proportional Pressure Controls: Pilot Relief / Relief / Reducing and RelievinghaggAinda não há avaliações
- Resistance Thermometer AB-E 31-17: 1 Area of ApplicationDocumento3 páginasResistance Thermometer AB-E 31-17: 1 Area of Applicationhagg0% (1)
- Pressure SwitchesDocumento4 páginasPressure SwitcheshaggAinda não há avaliações
- Oil Level Indicator AB-E 31-21: ND3 Sheet 1Documento5 páginasOil Level Indicator AB-E 31-21: ND3 Sheet 1hagg0% (1)
- Float Switches AB-E 31-06: Without Protective Tube, With One or Two Switching Contacts Sheet 1Documento6 páginasFloat Switches AB-E 31-06: Without Protective Tube, With One or Two Switching Contacts Sheet 1haggAinda não há avaliações
- Thermostat AB-E 31-32: Adjustment Range 5 To 100°CDocumento2 páginasThermostat AB-E 31-32: Adjustment Range 5 To 100°ChaggAinda não há avaliações
- Heat Exchanger AB-E 32-09: Oil / Water System: Single TubeDocumento7 páginasHeat Exchanger AB-E 32-09: Oil / Water System: Single TubehaggAinda não há avaliações
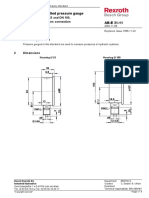
- Glycerine Filled Pressure Gauge AB-E 31-11: DN 63 and DN 100, Bottom ConnectionDocumento4 páginasGlycerine Filled Pressure Gauge AB-E 31-11: DN 63 and DN 100, Bottom ConnectionhaggAinda não há avaliações
- Technical Catalogue: June JuneDocumento9 páginasTechnical Catalogue: June JunehaggAinda não há avaliações
- The Oil Level Switch With Technical and Economical Advantages!Documento2 páginasThe Oil Level Switch With Technical and Economical Advantages!haggAinda não há avaliações
- Technical Catalogue FPDocumento100 páginasTechnical Catalogue FPhaggAinda não há avaliações
- Abe21 14 2002 11 06Documento2 páginasAbe21 14 2002 11 06haggAinda não há avaliações
- Coils and ConnectorsDocumento6 páginasCoils and ConnectorshaggAinda não há avaliações
- Technical Results With Driving Power: Drive Systems For DecantersDocumento6 páginasTechnical Results With Driving Power: Drive Systems For DecantershaggAinda não há avaliações
- Denison Parker R6VDocumento15 páginasDenison Parker R6VhaggAinda não há avaliações
- D O Cetop 3/Ng6: Irectional Control Valves Ther Operator IDocumento3 páginasD O Cetop 3/Ng6: Irectional Control Valves Ther Operator IhaggAinda não há avaliações
- 285 Relee Tip URF Pentru ComutatoareDocumento8 páginas285 Relee Tip URF Pentru ComutatoarehaggAinda não há avaliações
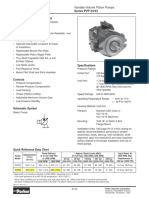
- Performance Information: Series PVP 23/33 Technical InformationDocumento10 páginasPerformance Information: Series PVP 23/33 Technical InformationhaggAinda não há avaliações
- Process Systems Analysis and Control D Coughanowr 3rd Ed 2Documento6 páginasProcess Systems Analysis and Control D Coughanowr 3rd Ed 2bismilishfaqAinda não há avaliações
- Human-Robot Interaction: A SurveyDocumento73 páginasHuman-Robot Interaction: A SurveyFrizbeeFanatic14Ainda não há avaliações
- Closed Loop BandwidthDocumento7 páginasClosed Loop BandwidthKarthik KoneruAinda não há avaliações
- Pre GATE 2018 2nd Test Question PaperDocumento20 páginasPre GATE 2018 2nd Test Question PaperPANKAJ AGRAHARIAinda não há avaliações
- Anti Surge ControllersDocumento2 páginasAnti Surge Controllersvkeie0206Ainda não há avaliações
- Gandhinagar Institute of Technology: Question BankDocumento5 páginasGandhinagar Institute of Technology: Question BankvineetanishadAinda não há avaliações
- Cara Kerja PlungerDocumento4 páginasCara Kerja PlungerGaLih Pancaran SentirAinda não há avaliações
- Seminar On Control of Heat ExchangerDocumento9 páginasSeminar On Control of Heat ExchangerNITISH KUMAR K CHAinda não há avaliações
- Advance Control System Lab ManualDocumento42 páginasAdvance Control System Lab ManualIshwari GhuleAinda não há avaliações
- MPC Book PDFDocumento193 páginasMPC Book PDFDaniel ZamudioAinda não há avaliações
- Inversor Baummer PDFDocumento254 páginasInversor Baummer PDFLuiz Mauro XavierAinda não há avaliações
- PID ControlDocumento3 páginasPID ControlDraganAinda não há avaliações
- Control System - WikipediaDocumento8 páginasControl System - WikipediafwefAinda não há avaliações
- Multivariable Control and Coordination Systems Case StudiesDocumento12 páginasMultivariable Control and Coordination Systems Case StudiesOliver Colombini LjungbergAinda não há avaliações
- Control Systems - State Space ModelDocumento8 páginasControl Systems - State Space ModelVivek PatilAinda não há avaliações
- Multivariable Control of A Pulsed Liquid-Liquid Extraction Column by Neural NetworksDocumento9 páginasMultivariable Control of A Pulsed Liquid-Liquid Extraction Column by Neural NetworksArunAinda não há avaliações
- A Novel Ultra-Wideband Bandpass FilterDocumento2 páginasA Novel Ultra-Wideband Bandpass FilterpramodinibidharAinda não há avaliações
- Kian Sanat MR - Lavasani: ManualDocumento56 páginasKian Sanat MR - Lavasani: ManualMiroslav MervaAinda não há avaliações
- AUST Measurements LabDocumento46 páginasAUST Measurements LabNazmul Haque ParthibAinda não há avaliações
- Robust Control of A Single-Phase VSI With LCL Filter For Grid-Tie and Islanded Operation ModesDocumento8 páginasRobust Control of A Single-Phase VSI With LCL Filter For Grid-Tie and Islanded Operation ModesJoseCarlosUgazAinda não há avaliações
- Hybrid Energy Storage System For Voltage Stability in A DC Microgrid Using A Modified Control StrategyDocumento6 páginasHybrid Energy Storage System For Voltage Stability in A DC Microgrid Using A Modified Control StrategykhalidAinda não há avaliações
- Roll Angle Stabilization of Fixed Wing UDocumento12 páginasRoll Angle Stabilization of Fixed Wing UАлуа ЕрмековаAinda não há avaliações
- Uttar Pradesh Technical University Lucknow: SyllabusDocumento18 páginasUttar Pradesh Technical University Lucknow: SyllabusChetan SwaroopAinda não há avaliações
- BIBO Stability Proof PDFDocumento7 páginasBIBO Stability Proof PDFtasos7639Ainda não há avaliações
- A Presentation On Control Valves: G - Sridhar Instrumentation NFCLDocumento71 páginasA Presentation On Control Valves: G - Sridhar Instrumentation NFCLSridhar GudapatiAinda não há avaliações