Você também pode gostar
- Teoria de Maquinas y MecanismosDocumento12 páginasTeoria de Maquinas y MecanismosEdgar ReyesAinda não há avaliações
- Mecanismos Planos de PalancaDocumento29 páginasMecanismos Planos de PalancaLex XmienezAinda não há avaliações
- LAB#1 (Dinamica Aplicada)Documento11 páginasLAB#1 (Dinamica Aplicada)GabrielIsaiasFloresMurilloAinda não há avaliações
- Módulo 1 - Tensión Compresion y CortanteDocumento54 páginasMódulo 1 - Tensión Compresion y CortanteElio SaldañaAinda não há avaliações
- Enerpac Workholding PDFDocumento232 páginasEnerpac Workholding PDFEdgarAinda não há avaliações
- Endurecimiento Por DispersionDocumento20 páginasEndurecimiento Por DispersionAnthony AlvarezAinda não há avaliações
- Investigación-Calentamiento, Vertido, Solidificación y EnfriamientoDocumento8 páginasInvestigación-Calentamiento, Vertido, Solidificación y EnfriamientoDamy OrtizAinda não há avaliações
- Reporte de La Práctica de TensiónDocumento7 páginasReporte de La Práctica de TensiónvicenteAinda não há avaliações
- Informe de Fatiga y PandeoDocumento26 páginasInforme de Fatiga y PandeoJonathan Rojas MillarAinda não há avaliações
- LevasDocumento63 páginasLevasAlejandro0910100% (1)
- Mecanica de Materiales Elementos EspecialesDocumento13 páginasMecanica de Materiales Elementos EspecialesFelix Juarez DuranAinda não há avaliações
- Fuerza Aplicada Externamente Sobre Una Union AtornilladaDocumento4 páginasFuerza Aplicada Externamente Sobre Una Union AtornilladaVictor OyolaAinda não há avaliações
- Mecanismos IVDocumento47 páginasMecanismos IVdanherzAinda não há avaliações
- Esmerilado y RectificadoDocumento11 páginasEsmerilado y Rectificadokarla zelayaAinda não há avaliações
- Lab02 - GL01Documento17 páginasLab02 - GL01Mario Ernesto Duran Lopez100% (1)
- Cap1 Maquinas y Mecanismos Resumen ShigleyDocumento10 páginasCap1 Maquinas y Mecanismos Resumen ShigleyPascual MaldonadoAinda não há avaliações
- Practica 7Documento13 páginasPractica 7Damaris TalaveraAinda não há avaliações
- Historia de Los MecanismosDocumento5 páginasHistoria de Los MecanismosGus LópezAinda não há avaliações
- SprocketsDocumento18 páginasSprocketsFredi Isai Angeles MirandaAinda não há avaliações
- Grandes Temas de La MatemáticaDocumento6 páginasGrandes Temas de La MatemáticaXimena CabiativaAinda não há avaliações
- Mecanismo de 4 BarrasDocumento9 páginasMecanismo de 4 BarrasAlbert GuerreroAinda não há avaliações
- Procesos de ManufacturaDocumento21 páginasProcesos de ManufacturacarAinda não há avaliações
- Retícula Ingenieria Mecánica (Instituto Tecnológico de Nuevo Laredo)Documento2 páginasRetícula Ingenieria Mecánica (Instituto Tecnológico de Nuevo Laredo)Guillermo ReyesAinda não há avaliações
- Estatica BeerDocumento7 páginasEstatica BeerElena Pelayes BenavidesAinda não há avaliações
- Sistema de Maquinas Desarmables 62-005Documento144 páginasSistema de Maquinas Desarmables 62-005Fabian Nina AguirreAinda não há avaliações
- Ensayo 1.3 Categoría de Los Procesos de FabricaciónDocumento8 páginasEnsayo 1.3 Categoría de Los Procesos de FabricaciónENRIQUE SANCHEZAinda não há avaliações
- Aplicaciones Del BJT Como AmplificadoresDocumento7 páginasAplicaciones Del BJT Como AmplificadoresRenzoZaldivarCastañedaAinda não há avaliações
- Tesina Seguidor de LineaDocumento29 páginasTesina Seguidor de LineabrandonAinda não há avaliações
- Teorias y Criterios de Fallas Por Cargas Estaticas y DinamicasDocumento6 páginasTeorias y Criterios de Fallas Por Cargas Estaticas y DinamicasSergio StalinAinda não há avaliações
- Tren de Engranes Helecoidales de Doble ReduccionDocumento6 páginasTren de Engranes Helecoidales de Doble Reduccioncarlos carrionAinda não há avaliações
- CepilladoraDocumento20 páginasCepilladoraBrenda SalvatierraAinda não há avaliações
- Clases Completas Ciencia de MaterialesDocumento782 páginasClases Completas Ciencia de MaterialessantiagoAinda não há avaliações
- Clasificación de Los MecanismosDocumento19 páginasClasificación de Los Mecanismosalex100% (1)
- Tratamientos Térmicos de Los Aceros AleadosDocumento8 páginasTratamientos Térmicos de Los Aceros AleadosEduardo VélezAinda não há avaliações
- Quijadas Cuadradas y en EspiralDocumento3 páginasQuijadas Cuadradas y en EspiralHeriberto PerezAinda não há avaliações
- Construccion de Un Mecanismo para Aplastar LatasDocumento6 páginasConstruccion de Un Mecanismo para Aplastar Latasjofre tituañaAinda não há avaliações
- CONFORMACIÓNDocumento51 páginasCONFORMACIÓNRenzo GonzalezAinda não há avaliações
- Expo HuamanDocumento7 páginasExpo HuamankevinestAinda não há avaliações
- Esfuerzo TérmicoDocumento10 páginasEsfuerzo TérmicoFernando Quenta PeñarandaAinda não há avaliações
- Variantes Del Mecanismo de 4 BarrasDocumento4 páginasVariantes Del Mecanismo de 4 BarrasErick JiménezAinda não há avaliações
- Reporte Vibraciones Pendulo SimpleDocumento19 páginasReporte Vibraciones Pendulo SimplelucasAinda não há avaliações
- Laboratorio 1 PDFDocumento29 páginasLaboratorio 1 PDFMiguelAngelLaraAinda não há avaliações
- Engranajes PDFDocumento80 páginasEngranajes PDFWillman VillamizarAinda não há avaliações
- Esfuerzo FlexionanteDocumento3 páginasEsfuerzo FlexionanteAramis Serratal100% (1)
- CUESTIONARIODocumento3 páginasCUESTIONARIOAnonymous 4Y3YO2ASB80% (1)
- Trabajo Final de Fisica 2014Documento2 páginasTrabajo Final de Fisica 2014Raul MejiaAinda não há avaliações
- Estado CuanticoDocumento2 páginasEstado CuanticoAzulon AvatarfanAinda não há avaliações
- Fundamentos de Manufactura ModernaDocumento19 páginasFundamentos de Manufactura ModernaGary De LeonAinda não há avaliações
- Deber Ejercicios Cap 2 Cap 4Documento6 páginasDeber Ejercicios Cap 2 Cap 4Andres Aman CuadradoAinda não há avaliações
- Tren de Engranes 3Documento5 páginasTren de Engranes 3Eduardo TapiaAinda não há avaliações
- Estatica Tema 8Documento18 páginasEstatica Tema 8JuanAinda não há avaliações
- Ingeniería de Materiales Unidad 1Documento21 páginasIngeniería de Materiales Unidad 1AlbertoAinda não há avaliações
- G-3 - Análisis de MecanismosDocumento15 páginasG-3 - Análisis de MecanismosLeyda Mayre Escalante TorresAinda não há avaliações
- Mecanismos. Grado de LibertadDocumento13 páginasMecanismos. Grado de Libertadflores floresAinda não há avaliações
- Portafolio MecanismosDocumento8 páginasPortafolio MecanismosAlfredo Soto PáramoAinda não há avaliações
- Mecanismos TopologiaDocumento10 páginasMecanismos TopologiaCésar LaraAinda não há avaliações
- Grados de Libertad e Inversion CinemáticaDocumento30 páginasGrados de Libertad e Inversion CinemáticaDiego Niikii Sixx100% (1)
- Capitulo 1Documento27 páginasCapitulo 1Mathewos DefaAinda não há avaliações
- Análisis y Síntesis de MecanismosDocumento114 páginasAnálisis y Síntesis de MecanismosOstrogradski Sacks Alembert92% (12)
- Problema 13 40Documento4 páginasProblema 13 40EDEN MOSCOL100% (1)
- Gases RealesDocumento6 páginasGases RealesEdgardo Atoche SánchezAinda não há avaliações
- Problema 13 50Documento4 páginasProblema 13 50Rolando BobadillaAinda não há avaliações
- Capitulo 4 Flujo de PotenciaDocumento25 páginasCapitulo 4 Flujo de PotenciaRolando Bobadilla100% (1)
- Regulacion de VoltajeDocumento15 páginasRegulacion de VoltajeWilliam Alfonso Moreno PerezAinda não há avaliações
- Capitulo 2Documento49 páginasCapitulo 2mercielm100% (2)
- Conductores ACSRDocumento13 páginasConductores ACSRCamilo Andrés Villarreal RuedaAinda não há avaliações
- Aplicaciones TransistorDocumento93 páginasAplicaciones TransistorAR RocaAinda não há avaliações
- Informe 01 LodeDocumento13 páginasInforme 01 LodeEdgardo Atoche SánchezAinda não há avaliações
- HolaºDocumento1 páginaHolaºEdgardo Atoche SánchezAinda não há avaliações
- Aplicaciones TransistorDocumento93 páginasAplicaciones TransistorAR RocaAinda não há avaliações
- Electrónica General 2Documento6 páginasElectrónica General 2Edgardo Atoche SánchezAinda não há avaliações
- Problemas FLDocumento14 páginasProblemas FLEdgardo Atoche SánchezAinda não há avaliações
- NCh03245 2010 043 PDFDocumento52 páginasNCh03245 2010 043 PDFdialixhAinda não há avaliações
- NCh03245 2010 043 PDFDocumento52 páginasNCh03245 2010 043 PDFdialixhAinda não há avaliações
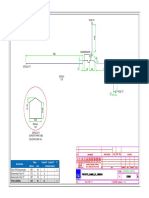
- Layout Vivero-TAFEDocumento1 páginaLayout Vivero-TAFEEdgardo Atoche SánchezAinda não há avaliações
- Entregable 2Documento51 páginasEntregable 2Edgardo Atoche SánchezAinda não há avaliações
- Informe - ReferenciaDocumento24 páginasInforme - ReferenciaEdgardo Atoche SánchezAinda não há avaliações
- Entregable 3Documento36 páginasEntregable 3Edgardo Atoche SánchezAinda não há avaliações
- It Ee09Documento12 páginasIt Ee09Wilder David Bermudez BoomAinda não há avaliações
- Riego AutomatizadoDocumento35 páginasRiego AutomatizadoEdgardo Atoche SánchezAinda não há avaliações
- Sistema de Riego Por Goteo AutomáticoDocumento24 páginasSistema de Riego Por Goteo AutomáticoJesús Castañeda GutierrezAinda não há avaliações
- Modifican El Documento Tecnico Prevencion Diagnostico y TR Resolucion Ministerial N 270 2020 Minsa 1866159 4Documento2 páginasModifican El Documento Tecnico Prevencion Diagnostico y TR Resolucion Ministerial N 270 2020 Minsa 1866159 4Jorge E. HerreraAinda não há avaliações
- Ejercicios Resueltos de Teoria de Conjuntos Pagina EducativaDocumento3 páginasEjercicios Resueltos de Teoria de Conjuntos Pagina EducativaWENDY ANGELA MALLQUI BUSTAMANTEAinda não há avaliações
- Caracteristicas y Perfiles de Piezas DentalesDocumento16 páginasCaracteristicas y Perfiles de Piezas DentalesLuisa Alzate PosadaAinda não há avaliações
- GTZ (Tecnologí A Del Automovil II)Documento392 páginasGTZ (Tecnologí A Del Automovil II)Daniel Robalino100% (13)
- Ecuaciones Diferenciales Ordinarias 1era ParteDocumento20 páginasEcuaciones Diferenciales Ordinarias 1era ParteJ TrujAinda não há avaliações
- Ejercicios Del Libro WALPOLEDocumento10 páginasEjercicios Del Libro WALPOLEXimena Villar MartosAinda não há avaliações
- 3.2 An Lisis Del AguaDocumento46 páginas3.2 An Lisis Del AguaMatias RaventosAinda não há avaliações
- 02 Boletín de Precios Agropecuarios Mensual Febrero 2020Documento47 páginas02 Boletín de Precios Agropecuarios Mensual Febrero 2020Balerin GálvezAinda não há avaliações
- 2° Parcial RESUELTODocumento4 páginas2° Parcial RESUELTOJosefina Mariel Montero JuarezAinda não há avaliações
- 8EGBDocumento61 páginas8EGBjesica paltan100% (1)
- TRABAJO DE Diseno Bloques Al Azar PDFDocumento6 páginasTRABAJO DE Diseno Bloques Al Azar PDFMrheiden Miheiden MiheidenAinda não há avaliações
- Trabajo Final BiofisicaDocumento3 páginasTrabajo Final BiofisicaAlexandra Nova SánchezAinda não há avaliações
- CiclosDocumento42 páginasCiclos3386672Ainda não há avaliações
- 9.2.2.7 Packet Tracer - Configuring Multiarea OSPFv3 InstructionsDocumento2 páginas9.2.2.7 Packet Tracer - Configuring Multiarea OSPFv3 InstructionsameliaAinda não há avaliações
- Tema 4 y 5 MetodologíaDocumento5 páginasTema 4 y 5 MetodologíaLuna LlenaAinda não há avaliações
- 1ºeso AlumnoDocumento100 páginas1ºeso AlumnoAlejandro vaquerizoAinda não há avaliações
- Actividad 6 Fisica NewDocumento10 páginasActividad 6 Fisica NewJose ParraAinda não há avaliações
- Actividad 06Documento45 páginasActividad 06Anonymous TQXCZ5KSAinda não há avaliações
- TG - 01 Centro de AcopioDocumento2 páginasTG - 01 Centro de AcopioSaki Llenque MolinaAinda não há avaliações
- 7 Aproximacion de FuncionesDocumento66 páginas7 Aproximacion de FuncionesJoseAinda não há avaliações
- En La Vida de Una Tormenta OrdinariaDocumento1 páginaEn La Vida de Una Tormenta OrdinariaEstefania ZaldivarAinda não há avaliações
- Iso 7810 2003Documento3 páginasIso 7810 2003Ronald García0% (1)
- POLIMEROS14 UNIDAD 5 Elastomeros y Eslaticidad de Las GomasDocumento32 páginasPOLIMEROS14 UNIDAD 5 Elastomeros y Eslaticidad de Las GomasDarío RiosaAinda não há avaliações
- Medidores de Flujo en TuberíasDocumento4 páginasMedidores de Flujo en TuberíasJorgito RiveroAinda não há avaliações
- Razones para Actuar. Una Teoria - John R. SearleDocumento503 páginasRazones para Actuar. Una Teoria - John R. SearleFabio Morandin0% (1)
- Actividad Del AguaDocumento11 páginasActividad Del AguaALMA PAULINA BARAJAS CASTAÑEDAAinda não há avaliações
- FINAL 5er TURNO 6 12 22Documento2 páginasFINAL 5er TURNO 6 12 22Iriana GallegosAinda não há avaliações
- Capítulo 3Documento57 páginasCapítulo 3Alejandro PereyraAinda não há avaliações
- 18° Energia Potencial ElasticaDocumento4 páginas18° Energia Potencial ElasticaDiomedez Wiz HofmannAinda não há avaliações
- Capitulo ViDocumento213 páginasCapitulo ViJhonny Rafael Blanco Caura100% (1)
- Resistencia de Las Labores Mineras Al Movimieto Del AireDocumento42 páginasResistencia de Las Labores Mineras Al Movimieto Del AireManuelDeLaCruzGuerreroAinda não há avaliações