Você também pode gostar
- Guia CirosDocumento91 páginasGuia CirosHéctor PeñaAinda não há avaliações
- Cinematic A Direct A RobotDocumento72 páginasCinematic A Direct A RobotHans VilchezAinda não há avaliações
- 1 - IntroduccionDocumento79 páginas1 - IntroduccionJose YepesAinda não há avaliações
- Informe Brazo RoboticoDocumento14 páginasInforme Brazo RoboticoMire MedinaAinda não há avaliações
- Robots Asistenciales PDFDocumento42 páginasRobots Asistenciales PDFWIGTITAAinda não há avaliações
- Ensayo Dinamica Del RobtoDocumento2 páginasEnsayo Dinamica Del RobtoAndrés Castro MamaniAinda não há avaliações
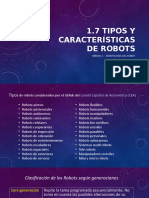
- Tipos y Características de Los RobotsDocumento15 páginasTipos y Características de Los RobotsGilbertoAinda não há avaliações
- Preguntas PDFDocumento4 páginasPreguntas PDFFrank RodríguezAinda não há avaliações
- Encendiendo LED con potenciómetro y ArduinoDocumento19 páginasEncendiendo LED con potenciómetro y ArduinoJhon Carlos Castillo AtencioAinda não há avaliações
- Control PID Con Redes NeuronalesDocumento11 páginasControl PID Con Redes NeuronalesJosue MoraAinda não há avaliações
- Historia y clasificación de los robots industrialesDocumento48 páginasHistoria y clasificación de los robots industrialesDavid GarciaAinda não há avaliações
- Metodos de Programacion de RobotsDocumento20 páginasMetodos de Programacion de RobotsDavid Shure XivAinda não há avaliações
- Morfología Del RobotDocumento18 páginasMorfología Del RobotM Sc Marco Antonio Canchola100% (1)
- Modulo 1 Titulo 1 Robotica 1Documento7 páginasModulo 1 Titulo 1 Robotica 1angelica joannaAinda não há avaliações
- Instrumentación Lm35Documento10 páginasInstrumentación Lm35jorjito91Ainda não há avaliações
- RecomendacionesDocumento18 páginasRecomendacionesCarlos PilatasigAinda não há avaliações
- Robótica MédicaDocumento36 páginasRobótica MédicaVILMA0% (1)
- Reporte de Práctica 1 - Robotica - Componentes de Un RobotDocumento21 páginasReporte de Práctica 1 - Robotica - Componentes de Un RobotAlex VargasAinda não há avaliações
- Plan de Mantenimiento Robot Paketizador - FujiDocumento2 páginasPlan de Mantenimiento Robot Paketizador - FujiAlfredoFloresAinda não há avaliações
- Historia de la robótica en 10 fechas claveDocumento7 páginasHistoria de la robótica en 10 fechas claveAnonymous 13bD6J7Ainda não há avaliações
- Practica 5Documento33 páginasPractica 5sistemaelectricoAinda não há avaliações
- La Historia de Los Robots CompletaDocumento7 páginasLa Historia de Los Robots CompletaKevin Antonio DAAinda não há avaliações
- CONCEPTOS-CONTROLDocumento7 páginasCONCEPTOS-CONTROLSergioAinda não há avaliações
- Robot Seguidor de LineaDocumento4 páginasRobot Seguidor de Lineacheco66666Ainda não há avaliações
- Palabra de ConfiguraciónDocumento7 páginasPalabra de ConfiguraciónMauricio NavarreteAinda não há avaliações
- Control LED con LabVIEWDocumento8 páginasControl LED con LabVIEWIsrael Pastelin MoralesAinda não há avaliações
- ROBOTICA MEDICA FinalllDocumento26 páginasROBOTICA MEDICA FinalllcinthiaafroditaAinda não há avaliações
- Robot cartesiano TESEDocumento28 páginasRobot cartesiano TESEangyspacos100% (1)
- Kuka KR6 R900Documento41 páginasKuka KR6 R900LUIS ALBERTO AYRA ROMERO100% (1)
- Historia Impresora 3DDocumento21 páginasHistoria Impresora 3DFelix Pujols RosarioAinda não há avaliações
- Examen Logica CombinacionalDocumento5 páginasExamen Logica CombinacionalJulian NontoaAinda não há avaliações
- Brazo RoboticoDocumento9 páginasBrazo Roboticorudy condoriAinda não há avaliações
- PLC Practica 1Documento15 páginasPLC Practica 1looboboAinda não há avaliações
- Mariana ReporteDocumento7 páginasMariana ReportemarianaAinda não há avaliações
- Manual de Ciros RoboticsDocumento52 páginasManual de Ciros RoboticsoxonoerAinda não há avaliações
- Brazo Robotico Controaldo Por JoystickDocumento4 páginasBrazo Robotico Controaldo Por JoystickSaul Garcia AguilarAinda não há avaliações
- Articulo FinalDocumento13 páginasArticulo FinalRonald GarciaAinda não há avaliações
- Toolbox MatlabDocumento8 páginasToolbox MatlabSergio SorucoAinda não há avaliações
- Analisis de Un Robot Manipulador Scara ARTICULODocumento22 páginasAnalisis de Un Robot Manipulador Scara ARTICULOcarlos.otiniano9811Ainda não há avaliações
- RobóticaDocumento8 páginasRobóticaGabriela ViciusAinda não há avaliações
- Robot Manipulador IndustrialDocumento6 páginasRobot Manipulador IndustrialJosé AntonioAinda não há avaliações
- Part 5. 4008S - V10 - SM - 11a-2016 - SW - TranlatedDocumento79 páginasPart 5. 4008S - V10 - SM - 11a-2016 - SW - TranlatedAuxiliar de Mantenimiento NacionalAinda não há avaliações
- Diseño y Análisis de Controladores para Un Robot de 3GDL Con Capacidad de Dibujo - Rimachi Albites PaucarDocumento12 páginasDiseño y Análisis de Controladores para Un Robot de 3GDL Con Capacidad de Dibujo - Rimachi Albites PaucarMichael Rimachi100% (2)
- Proyecto de Tesis - Brazo RobóticoDocumento17 páginasProyecto de Tesis - Brazo RobóticoVíctor Barreto VásquezAinda não há avaliações
- Proyecto Innovador Mano ArticuladaDocumento66 páginasProyecto Innovador Mano ArticuladaOscar Altamirano SilvaAinda não há avaliações
- 8 Tipos de Robots IndustrialesDocumento7 páginas8 Tipos de Robots IndustrialesbreynnerAinda não há avaliações
- Tema 2 - Morfología Del RobotDocumento44 páginasTema 2 - Morfología Del RobotDulce VelizAinda não há avaliações
- CV Daniel MartinezDocumento2 páginasCV Daniel MartinezDaniel MartinezAinda não há avaliações
- Programación Basica de Microcontroladores PIC en CDocumento6 páginasProgramación Basica de Microcontroladores PIC en CMijael Edward Ttacca HuallaAinda não há avaliações
- Proyecto - Robot AbbDocumento25 páginasProyecto - Robot AbbmiguelthorAinda não há avaliações
- Sistemas de control en robóticaDocumento56 páginasSistemas de control en robóticadaniel buelvasAinda não há avaliações
- Presentacion de Sistemas CAD, CAE, CAM - Pérez - Águila - IrvingDocumento13 páginasPresentacion de Sistemas CAD, CAE, CAM - Pérez - Águila - IrvingIrving PérezAinda não há avaliações
- Plan de Mantenimiento NachiDocumento6 páginasPlan de Mantenimiento NachiUlises OrnelasAinda não há avaliações
- Controladores Logicos Programables - Unidad 1Documento142 páginasControladores Logicos Programables - Unidad 1Victor Felipe Domínguez Malo100% (1)
- Proyecto Brazo RoboticoDocumento17 páginasProyecto Brazo RoboticoAndre JacintoAinda não há avaliações
- Brazo Rob..Documento9 páginasBrazo Rob..Luis DavalosAinda não há avaliações
- Brazo RobotDocumento33 páginasBrazo RobotPequesi SegAinda não há avaliações
- Proyecto AuntuliusDocumento6 páginasProyecto AuntuliusMax Rivas OrtegaAinda não há avaliações
- RoboticaDocumento61 páginasRoboticaJuan CorpusAinda não há avaliações
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalNo EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalNota: 5 de 5 estrelas5/5 (4)
- Electronica Digital Trabajo 2Documento6 páginasElectronica Digital Trabajo 2Piero AguilarAinda não há avaliações
- Equipo 6 Cause Segmentado de Ejecucion PipelineDocumento58 páginasEquipo 6 Cause Segmentado de Ejecucion PipelineAlanAinda não há avaliações
- Ensayo Medios de Transmisión GuiadosDocumento5 páginasEnsayo Medios de Transmisión GuiadosANM590% (2)
- Piratas de Silicon ValleyDocumento2 páginasPiratas de Silicon ValleyJorge Luis Villavicencio Meza0% (1)
- 11ejerciciosparadominareltecladodetupc PDFDocumento10 páginas11ejerciciosparadominareltecladodetupc PDFjulissa redondoAinda não há avaliações
- Arquitectura de Dispositivos Móviles: Desarmar Dispositivo MóvilDocumento2 páginasArquitectura de Dispositivos Móviles: Desarmar Dispositivo MóvilFernando OleaAinda não há avaliações
- Dime Como Evaluas y Te Dire Que Tipo de Profesional y de Persona EresDocumento7 páginasDime Como Evaluas y Te Dire Que Tipo de Profesional y de Persona EresCinthia Flores AlarcónAinda não há avaliações
- Autocad 2016 BasicoDocumento110 páginasAutocad 2016 Basicoawys61434100% (6)
- Review Cubot GT99Documento28 páginasReview Cubot GT99jimymotoAinda não há avaliações
- PROCEDIMIENTOSDocumento6 páginasPROCEDIMIENTOSRoberto AlemanAinda não há avaliações
- Sistemas Operativos: ¿Qué es y su HistoriaDocumento38 páginasSistemas Operativos: ¿Qué es y su HistoriaFernandoAinda não há avaliações
- Introduccion A Ensamblado de ComputadorasDocumento32 páginasIntroduccion A Ensamblado de ComputadorasFabian Enrique Bustamante RojasAinda não há avaliações
- Alarma Tiburon LCD para Moto Alarma Con ArrancadorDocumento12 páginasAlarma Tiburon LCD para Moto Alarma Con ArrancadorGlennAinda não há avaliações
- Manual para Impresora HP m225 - 226 WDocumento144 páginasManual para Impresora HP m225 - 226 WlixetteAinda não há avaliações
- Manual.3 BT10Documento4 páginasManual.3 BT10Guillermo DominguezAinda não há avaliações
- AMP Catalogo PDFDocumento2 páginasAMP Catalogo PDF160477Ainda não há avaliações
- Tesis Pre Final FinalDocumento38 páginasTesis Pre Final FinalHannibal HernandezAinda não há avaliações
- Tipos de datos complejos y estructuras LIFO y FIFODocumento28 páginasTipos de datos complejos y estructuras LIFO y FIFOCarlos Luis Alvarez Diaz100% (1)
- Unidad Central de ProcesamientoDocumento18 páginasUnidad Central de ProcesamientoJaime Hernnadez LopezAinda não há avaliações
- Hoja Técnica - Módulos RF 433MHzDocumento7 páginasHoja Técnica - Módulos RF 433MHzdieAinda não há avaliações
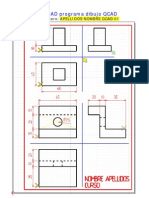
- 3eso Ejercicio 8 Todos Qcad 07-08Documento13 páginas3eso Ejercicio 8 Todos Qcad 07-08sanisidrotecno100% (3)
- Informe de Avance Informatica e Internet - ETDocumento3 páginasInforme de Avance Informatica e Internet - ETLuis Alberto Sanchez CheroAinda não há avaliações
- Windows 7 Boot RepairDocumento10 páginasWindows 7 Boot RepairGuillermo Celis PradaAinda não há avaliações
- Perfil Hidrosanitario I.E.Documento4 páginasPerfil Hidrosanitario I.E.Daniel RengifoAinda não há avaliações
- EcolocalizadorDocumento5 páginasEcolocalizadorDavid RiedelAinda não há avaliações
- Centerline 220 ManualDocumento1 páginaCenterline 220 ManualArnaldo100% (2)
- Análisis de Errores en ScilabDocumento18 páginasAnálisis de Errores en ScilabChossen SxbxAinda não há avaliações
- Errores Comunes de Windows XPDocumento9 páginasErrores Comunes de Windows XPcarg29Ainda não há avaliações
- Introducción Sobre MicrocontroladoresDocumento23 páginasIntroducción Sobre MicrocontroladoresJose RamonAinda não há avaliações
- Tesis. El Pic 19f84 (Uam)Documento45 páginasTesis. El Pic 19f84 (Uam)leunam2004Ainda não há avaliações