Você também pode gostar
- PLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingNo EverandPLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingNota: 4 de 5 estrelas4/5 (1)
- Mc-Smo-Sys 01 04Documento85 páginasMc-Smo-Sys 01 04Rafael100% (1)
- De MC SMO SYS en 01 V4 3 1 Sitrain Scout SystemDocumento388 páginasDe MC SMO SYS en 01 V4 3 1 Sitrain Scout SystemVíctor Belmar Landaeta100% (1)
- WINCC FluxDocumento21 páginasWINCC Fluxnabeel050100% (1)
- Fieldbus Systems and Their Applications 2005: A Proceedings volume from the 6th IFAC International Conference, Puebla, Mexico 14-25 November 2005No EverandFieldbus Systems and Their Applications 2005: A Proceedings volume from the 6th IFAC International Conference, Puebla, Mexico 14-25 November 2005Miguel Leon ChavezAinda não há avaliações
- Simotion Scout y S210Documento44 páginasSimotion Scout y S210EduardoAinda não há avaliações
- 01 1 SIN Komp - Po-Mod - EDocumento21 páginas01 1 SIN Komp - Po-Mod - EFelipe Polix BarbosaAinda não há avaliações
- Digital Operations: CMP IDocumento34 páginasDigital Operations: CMP INeagoe CristianAinda não há avaliações
- 04 Axes and DrivesDocumento68 páginas04 Axes and DrivesWanderley Terci Esteves100% (1)
- 1 10 Optimization PDFDocumento20 páginas1 10 Optimization PDFDanielAinda não há avaliações
- Introduction To Safety Integrated .......................................................................... 9-2Documento17 páginasIntroduction To Safety Integrated .......................................................................... 9-2HaddouAinda não há avaliações
- 00 - Register 20 deDocumento1 página00 - Register 20 deahijado motaAinda não há avaliações
- Communication Profibus-Fms: Automation and DrivesDocumento1 páginaCommunication Profibus-Fms: Automation and DrivesVictor YosafatAinda não há avaliações
- Sinamics HMI LabDocumento10 páginasSinamics HMI Labalpha1ahAinda não há avaliações
- 1 05 Tools PDFDocumento6 páginas1 05 Tools PDFDanielAinda não há avaliações
- Siemens Stardrive v14109743270 SINAMICS S120 TIA DOCU v10 enDocumento27 páginasSiemens Stardrive v14109743270 SINAMICS S120 TIA DOCU v10 enCarlos AlvearAinda não há avaliações
- 0 IK-PBSYS Cover15 V201Documento1 página0 IK-PBSYS Cover15 V201Isai Anguiano33% (3)
- Simotion Example For Beginners d435 en PDFDocumento87 páginasSimotion Example For Beginners d435 en PDFfrank0213Ainda não há avaliações
- S120 at S7 1500 SINA POS DOCU v10 enDocumento32 páginasS120 at S7 1500 SINA POS DOCU v10 enAdrian Menghes LH100% (1)
- Simotion Example For Beginners d435 enDocumento71 páginasSimotion Example For Beginners d435 enMustafa Yasin Halici67% (3)
- Curso ST-PPDS SafetyDocumento1 páginaCurso ST-PPDS Safetyجويل بريجيت ميلتشورAinda não há avaliações
- Rewiring A User Program: Simatic S7Documento16 páginasRewiring A User Program: Simatic S7Neagoe CristianAinda não há avaliações
- IK-TIAPN 01E Communication With SIMATICDocumento18 páginasIK-TIAPN 01E Communication With SIMATICenrique laicaAinda não há avaliações
- 1 12 Options PDFDocumento17 páginas1 12 Options PDFDanielAinda não há avaliações
- Infoplc Net Sitrain 06 SymbolicDocumento14 páginasInfoplc Net Sitrain 06 SymbolicBijoy RoyAinda não há avaliações
- 02 IK IESYS e Introduction To Industrial EthernetDocumento32 páginas02 IK IESYS e Introduction To Industrial EthernetHernando AlborAinda não há avaliações
- Guideline - en Simotion PDFDocumento73 páginasGuideline - en Simotion PDFqaisarharisAinda não há avaliações
- S7 HiGraphDocumento196 páginasS7 HiGraphTiberiu FleseriuAinda não há avaliações
- Programming Guideline DOKU v13 enDocumento101 páginasProgramming Guideline DOKU v13 envan erik de veek100% (3)
- SimotionDocumento2.250 páginasSimotionYugie OktavianaAinda não há avaliações
- Sce - en - 052-201 SCL - S7-1500 - R1703Documento37 páginasSce - en - 052-201 SCL - S7-1500 - R1703RafaelAinda não há avaliações
- Sce 142 200 Industrial Security s615 r1906 enDocumento59 páginasSce 142 200 Industrial Security s615 r1906 enQuang LêAinda não há avaliações
- PRO1 10E Introduction MicromasterDocumento20 páginasPRO1 10E Introduction MicromasterLộc QuangAinda não há avaliações
- NCM S7 For Industrial Ethernet JDocumento51 páginasNCM S7 For Industrial Ethernet Jyukaokto2Ainda não há avaliações
- Simotion (Basic)Documento458 páginasSimotion (Basic)tekhakkoAinda não há avaliações
- SIMATIC IT Production Suite V6.6 PDFDocumento23 páginasSIMATIC IT Production Suite V6.6 PDFSandeepAinda não há avaliações
- Block Technology (1) : SitrainDocumento46 páginasBlock Technology (1) : SitrainEmerson KleemAinda não há avaliações
- Hardware Commissioning ChecklistDocumento33 páginasHardware Commissioning ChecklistChihebJmaaAinda não há avaliações
- S7-Plcsim Advanced Function Manual en-US en-USDocumento399 páginasS7-Plcsim Advanced Function Manual en-US en-USaling alingAinda não há avaliações
- PCS 7 - Know-How in All Aspects of The Process Control SystemDocumento8 páginasPCS 7 - Know-How in All Aspects of The Process Control SystemEmir DelicAinda não há avaliações
- Automating With PROFINET Industrial Communication Based On Industrial Ethernet PDF Download Free OnlineDocumento1 páginaAutomating With PROFINET Industrial Communication Based On Industrial Ethernet PDF Download Free OnlineLavrenty LavrentiAinda não há avaliações
- SCOUT Getting StartedDocumento134 páginasSCOUT Getting StartedKhaled OuniAinda não há avaliações
- Graphic Screens (1) : Simatic HmiDocumento120 páginasGraphic Screens (1) : Simatic HmiHenrique XavierAinda não há avaliações
- Configuring A SINAMICS S120 With Startdrive V15Documento31 páginasConfiguring A SINAMICS S120 With Startdrive V15Rachid GharsalliAinda não há avaliações
- Sinamics TrainingDocumento4 páginasSinamics TrainingDaniel100% (1)
- 06 - Hmi Panels and Profibus DPDocumento23 páginas06 - Hmi Panels and Profibus DPIsai AnguianoAinda não há avaliações
- SINAMICS DriveDocumento61 páginasSINAMICS Driveطه محمدAinda não há avaliações
- TIA PRO1 00 RegisterDocumento1 páginaTIA PRO1 00 RegisterJulian David Arevalo GarciaAinda não há avaliações
- S7 Automation SolutionsDocumento25 páginasS7 Automation SolutionsNeagoe CristianAinda não há avaliações
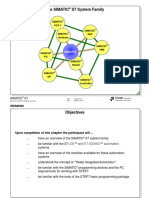
- SERV1 01e SystemFamilyDocumento19 páginasSERV1 01e SystemFamilyNeagoe CristianAinda não há avaliações
- Sinamics Drivesim Basic Doc v105 enDocumento136 páginasSinamics Drivesim Basic Doc v105 enJordan Pintado100% (1)
- Sce 142 100 Industrial Ethernet Xc208 r1906 enDocumento68 páginasSce 142 100 Industrial Ethernet Xc208 r1906 endanko1du2458Ainda não há avaliações
- Presentation - WinCC UnifiedDocumento69 páginasPresentation - WinCC UnifiedInstrument Dep.Ainda não há avaliações
- TIA PRO3 10 GRAPH enDocumento8 páginasTIA PRO3 10 GRAPH enHaddouAinda não há avaliações
- PROFIdrive Profile V4 0Documento271 páginasPROFIdrive Profile V4 0budak1Ainda não há avaliações
- Manual CLP EatonDocumento70 páginasManual CLP EatonWanderley Terci EstevesAinda não há avaliações
- 2h Prim enDocumento75 páginas2h Prim enEsouthnorthAinda não há avaliações
- 6AV21240GC010AX0 Datasheet enDocumento10 páginas6AV21240GC010AX0 Datasheet enWanderley Terci EstevesAinda não há avaliações
- CBS 1 Sistemas de Barramento IndustriaisDocumento17 páginasCBS 1 Sistemas de Barramento IndustriaisWanderley Terci EstevesAinda não há avaliações
- 2h Prim enDocumento75 páginas2h Prim enEsouthnorthAinda não há avaliações
- Set26 DocTech v2d0 enDocumento38 páginasSet26 DocTech v2d0 enWanderley Terci EstevesAinda não há avaliações
- 04 Axes and DrivesDocumento68 páginas04 Axes and DrivesWanderley Terci Esteves100% (1)
- Set30 Telecontrol CP1242-7 DOKU V13 enDocumento49 páginasSet30 Telecontrol CP1242-7 DOKU V13 enmperdomoqAinda não há avaliações
- CodesysDocumento79 páginasCodesysgiusssyAinda não há avaliações
- SoMachine M218 v2.0.31.10 Release NotesDocumento2 páginasSoMachine M218 v2.0.31.10 Release NotesWanderley Terci EstevesAinda não há avaliações
- Guia de Instalação - 2012Documento126 páginasGuia de Instalação - 2012keoma2Ainda não há avaliações
- 2h Prim enDocumento75 páginas2h Prim enEsouthnorthAinda não há avaliações
- Mitsubishi Melsec FX (English)Documento3 páginasMitsubishi Melsec FX (English)Wanderley Terci EstevesAinda não há avaliações
- Manual Simatic S7-200 em 1hDocumento53 páginasManual Simatic S7-200 em 1hbigopostAinda não há avaliações
- SERVO MOTOR CONTROL PWM ANGLE ROTATIONDocumento13 páginasSERVO MOTOR CONTROL PWM ANGLE ROTATIONChirkov Kire100% (1)
- Isa - 5.2Documento28 páginasIsa - 5.2Wanderley Terci EstevesAinda não há avaliações
- Isa - 5.1Documento72 páginasIsa - 5.1Wanderley Terci EstevesAinda não há avaliações
- Isa - 5.1Documento72 páginasIsa - 5.1Wanderley Terci EstevesAinda não há avaliações
- Manual Simatic S7-200 em 1hDocumento53 páginasManual Simatic S7-200 em 1hbigopostAinda não há avaliações
- AOP Panel EngDocumento36 páginasAOP Panel EngWanderley Terci EstevesAinda não há avaliações
- 2h Prim enDocumento75 páginas2h Prim enEsouthnorthAinda não há avaliações
- 35 Basic Chinese Words and Phrases For Mandarin Beginners - Rype MagazineDocumento15 páginas35 Basic Chinese Words and Phrases For Mandarin Beginners - Rype Magazinelyka ajneAinda não há avaliações
- Simple Present TenseDocumento16 páginasSimple Present TenseRaffaelAinda não há avaliações
- Gold Experience A1 - Workbook (Answer Key)Documento24 páginasGold Experience A1 - Workbook (Answer Key)Daiva Pamaiva100% (3)
- Functional Programming With C++ (2015) PDFDocumento100 páginasFunctional Programming With C++ (2015) PDFRomário Fernando Castro Azevedo MagalhãesAinda não há avaliações
- AvemariakimcvDocumento2 páginasAvemariakimcvapi-335616625Ainda não há avaliações
- "Colorless Green Ideas Sleep Furiously": A Linguistic Test Case and Its AppropriationsDocumento8 páginas"Colorless Green Ideas Sleep Furiously": A Linguistic Test Case and Its AppropriationsJúlio BonattiAinda não há avaliações
- Group 4: Caparas Sayago Vidauretta Quirogo TerolDocumento16 páginasGroup 4: Caparas Sayago Vidauretta Quirogo TerolIane Aliño NavarroAinda não há avaliações
- Action Research Lesson 1Documento4 páginasAction Research Lesson 1api-273218316Ainda não há avaliações
- 9781786460196-Java 9 Programming BlueprintsDocumento458 páginas9781786460196-Java 9 Programming BlueprintsPopescu Aurelian100% (1)
- Here are the correct matches between terms and statements:1. ALU - A2. Interrupt - B 3. RAM - CDocumento17 páginasHere are the correct matches between terms and statements:1. ALU - A2. Interrupt - B 3. RAM - CPK KAinda não há avaliações
- El Coco - Trumpet in BB 1Documento2 páginasEl Coco - Trumpet in BB 1Kafury MonikAinda não há avaliações
- Budding The Scientist ExamDocumento2 páginasBudding The Scientist Exammaiche amar100% (2)
- SECUNDARIA EXAM PREP FOR ENGLISH TESTDocumento2 páginasSECUNDARIA EXAM PREP FOR ENGLISH TESTbanksy 69Ainda não há avaliações
- PE Format LayoutDocumento1 páginaPE Format LayoutMarcialRuizAinda não há avaliações
- Speech Translation Unlocking Language BarriersDocumento7 páginasSpeech Translation Unlocking Language BarriersoltiboyevbobosherAinda não há avaliações
- Narrative TensesDocumento19 páginasNarrative Tensesmacateacher100% (4)
- Unicode Preparation PhaseDocumento53 páginasUnicode Preparation Phasesidneypd100% (3)
- Houschka Rounded SpecimenDocumento10 páginasHouschka Rounded SpecimenFormacros ZAinda não há avaliações
- Nef Elem Filetest 5a PDFDocumento4 páginasNef Elem Filetest 5a PDFPeter Torok KovacsAinda não há avaliações
- Structure II (Passive Voice)Documento2 páginasStructure II (Passive Voice)Haryawan WahyuAinda não há avaliações
- Useful New York Circle of Translators Article On NotariesDocumento12 páginasUseful New York Circle of Translators Article On Notariesquijote82Ainda não há avaliações
- Exam Activator PDFDocumento31 páginasExam Activator PDFЮлія СердюченкоAinda não há avaliações
- BAED-EAPP2111 English For Academic and Professional Purposes - WEEK 10 - 19Documento3 páginasBAED-EAPP2111 English For Academic and Professional Purposes - WEEK 10 - 19Yukiko Hachi80% (5)
- Psychological Testing in Africa Iop4861 Ass 1Documento18 páginasPsychological Testing in Africa Iop4861 Ass 1MontsengAinda não há avaliações
- Curriculum Vitae: Sample CVDocumento4 páginasCurriculum Vitae: Sample CVCristina MaximAinda não há avaliações
- Linking Words PDFDocumento2 páginasLinking Words PDFmanojkhadka23Ainda não há avaliações
- An Analysis On Slang Words Used in Jumanji 2 MovieDocumento32 páginasAn Analysis On Slang Words Used in Jumanji 2 MovieDoniBenu100% (3)
- Comparison of Adjectives: Adjective + Adj + Adj + Adj-AdjDocumento3 páginasComparison of Adjectives: Adjective + Adj + Adj + Adj-AdjCarrie ParkerAinda não há avaliações
- RomanconvertodecimalDocumento5 páginasRomanconvertodecimalakashAinda não há avaliações
- Volvo Information Technology Belgium 1Documento26 páginasVolvo Information Technology Belgium 1Sachin ShivaniAinda não há avaliações
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureNo EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureNota: 4.5 de 5 estrelas4.5/5 (2)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindAinda não há avaliações
- Arduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!No EverandArduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Nota: 4 de 5 estrelas4/5 (3)
- Atlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceNo EverandAtlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceNota: 5 de 5 estrelas5/5 (9)
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsAinda não há avaliações
- The Fourth Age: Smart Robots, Conscious Computers, and the Future of HumanityNo EverandThe Fourth Age: Smart Robots, Conscious Computers, and the Future of HumanityNota: 4.5 de 5 estrelas4.5/5 (115)
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)No EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Nota: 5 de 5 estrelas5/5 (2)
- In the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkNo EverandIn the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkNota: 5 de 5 estrelas5/5 (1)
- Dark Aeon: Transhumanism and the War Against HumanityNo EverandDark Aeon: Transhumanism and the War Against HumanityNota: 5 de 5 estrelas5/5 (1)
- Artificial Intelligence: From Medieval Robots to Neural NetworksNo EverandArtificial Intelligence: From Medieval Robots to Neural NetworksNota: 4 de 5 estrelas4/5 (3)
- What to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationNo EverandWhat to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationNota: 4.5 de 5 estrelas4.5/5 (2)
- Fusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.No EverandFusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.Ainda não há avaliações
- Design and Operation of Human Locomotion SystemsNo EverandDesign and Operation of Human Locomotion SystemsMarco CecarelliAinda não há avaliações
- Create Profitable Side Hustles with Artificial IntelligenceNo EverandCreate Profitable Side Hustles with Artificial IntelligenceAinda não há avaliações
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.No EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Nota: 4 de 5 estrelas4/5 (5)