Você também pode gostar
- Form 2 Science Chapter 7Documento32 páginasForm 2 Science Chapter 7qq23582% (11)
- English Form 2: Month Oct 2018Documento42 páginasEnglish Form 2: Month Oct 2018Mei QiiAinda não há avaliações
- Essay Cover 2017Documento1 páginaEssay Cover 2017Mei QiiAinda não há avaliações
- Physics HOTS KBAT QuestionsDocumento29 páginasPhysics HOTS KBAT QuestionskwAinda não há avaliações
- Topic: Microorganism and Their Effects On Living Things: Learning OutcomesDocumento34 páginasTopic: Microorganism and Their Effects On Living Things: Learning OutcomesNorzilah Mazahar100% (2)
- Success Phy F4 PN2015 4pp LowDocumento31 páginasSuccess Phy F4 PN2015 4pp LowIskandar Zulqarnain100% (2)
- Cobrain Holding SDN BHDDocumento1 páginaCobrain Holding SDN BHDMei QiiAinda não há avaliações
- Exp 6Documento9 páginasExp 6Mei Qii100% (1)
- Lab 10Documento6 páginasLab 10Mei QiiAinda não há avaliações
- Lab 5Documento4 páginasLab 5Mei QiiAinda não há avaliações
- Lab 6 ReportDocumento1 páginaLab 6 ReportMei QiiAinda não há avaliações
- in This CaseDocumento1 páginain This CaseMei QiiAinda não há avaliações
- Lab 5Documento4 páginasLab 5Mei QiiAinda não há avaliações
- Lab 6 ReportDocumento7 páginasLab 6 ReportMei QiiAinda não há avaliações
- Name ListDocumento6 páginasName ListMei QiiAinda não há avaliações
- Lab 10Documento6 páginasLab 10Mei QiiAinda não há avaliações
- List of ContentsDocumento27 páginasList of ContentsMei Qii100% (3)
- XLPE Insulated CablesDocumento32 páginasXLPE Insulated CablesMalik DausAinda não há avaliações
- Sizing Conductors and Selecting Protection Devices: Power Guide 2009 / Book 04Documento71 páginasSizing Conductors and Selecting Protection Devices: Power Guide 2009 / Book 04zbyszko201234Ainda não há avaliações
- PLEASE Keep CleanDocumento1 páginaPLEASE Keep CleanMei QiiAinda não há avaliações
- Capital Costs Versus Operating Costs: Lecture No.20 Contemporary Engineering EconomicsDocumento7 páginasCapital Costs Versus Operating Costs: Lecture No.20 Contemporary Engineering EconomicsMei QiiAinda não há avaliações
- Annual Equivalent Worth Criterion: Lecture No.19 Contemporary Engineering EconomicsDocumento12 páginasAnnual Equivalent Worth Criterion: Lecture No.19 Contemporary Engineering EconomicsMei QiiAinda não há avaliações
- BEM and Route To PEDocumento75 páginasBEM and Route To PEMei Qii100% (2)
- Exp 6Documento9 páginasExp 6Mei Qii100% (1)
- Kertas 2 Pep Sem 1 Ting 5 Terengganu 2012 - Soalan PDFDocumento19 páginasKertas 2 Pep Sem 1 Ting 5 Terengganu 2012 - Soalan PDFMei QiiAinda não há avaliações
- Part 1 ESHA Guide On How To Develop A Small Hydropower PlantDocumento151 páginasPart 1 ESHA Guide On How To Develop A Small Hydropower PlantirfanWPKAinda não há avaliações
- HW 2 SolutionDocumento18 páginasHW 2 SolutionMei QiiAinda não há avaliações
- Floor PlanDocumento1 páginaFloor PlanMei QiiAinda não há avaliações
- Cseb114 Midterm - Aug 2007 - QuestionsDocumento16 páginasCseb114 Midterm - Aug 2007 - QuestionsMei QiiAinda não há avaliações
- Ec Lab 6Documento7 páginasEc Lab 6Mei QiiAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (120)
- ASMDMDocumento2 páginasASMDMJhundel Factor PajarillagaAinda não há avaliações
- On The Two-Dimensional Knapsack ProblemDocumento10 páginasOn The Two-Dimensional Knapsack Problemomega uniqueAinda não há avaliações
- C01.03 Truncation Errors & Taylor SeriesDocumento17 páginasC01.03 Truncation Errors & Taylor SeriesMuhammad ZulhilmiAinda não há avaliações
- Mechanical Design Aspects For High-Performance Agitated ReactorsDocumento11 páginasMechanical Design Aspects For High-Performance Agitated ReactorsgpcshfAinda não há avaliações
- 1 Matrix Inversion by Gauss Jordan EliminationDocumento6 páginas1 Matrix Inversion by Gauss Jordan EliminationSphinx RainxAinda não há avaliações
- Cubic SplineDocumento40 páginasCubic SplineAgam SaxenaAinda não há avaliações
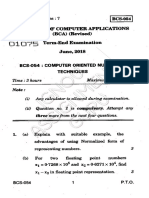
- BCS-054 - Compressed PDFDocumento7 páginasBCS-054 - Compressed PDFJai SharmaAinda não há avaliações
- Simpsons 1/3 & 3/8 Rule. Cabajes ReportDocumento7 páginasSimpsons 1/3 & 3/8 Rule. Cabajes ReportRbcabajes ButalonAinda não há avaliações
- Matlab Program For Method of Bisection Method When No. of Iterations Is GivenDocumento27 páginasMatlab Program For Method of Bisection Method When No. of Iterations Is GivenshubhamarvikarAinda não há avaliações
- An Introduction To Optimization 4th Edition Solution Manual PDFDocumento220 páginasAn Introduction To Optimization 4th Edition Solution Manual PDFsalman100% (1)
- Juan Camilo Alfonso 70990 Programacion DinamicaDocumento4 páginasJuan Camilo Alfonso 70990 Programacion DinamicaJuan Camilo AlfonsoAinda não há avaliações
- Scaling Objective FunctionDocumento6 páginasScaling Objective FunctionOSCARDELTAAinda não há avaliações
- The Tip of The Iceberg: 1 Before You StartDocumento18 páginasThe Tip of The Iceberg: 1 Before You Startregupathi6413Ainda não há avaliações
- Optimization Techniques Question BankDocumento14 páginasOptimization Techniques Question Banksmg26thmay100% (1)
- Walchand Institute of Technology, Solapur Information Technology 2021-22 SEMESTER - IDocumento5 páginasWalchand Institute of Technology, Solapur Information Technology 2021-22 SEMESTER - IKiran ChavanAinda não há avaliações
- Calyley Hamilton Theoram. Eigen NotesDocumento8 páginasCalyley Hamilton Theoram. Eigen NotesPriyanka PAinda não há avaliações
- University Updates: Text BooksDocumento2 páginasUniversity Updates: Text BooksmadhavAinda não há avaliações
- OptimDocumento70 páginasOptimNitin KumarAinda não há avaliações
- Cubic Spline FunctionDocumento56 páginasCubic Spline FunctionpedrokukAinda não há avaliações
- Differential Equations Using Scilab: Kannan M. Moudgalya IIT Bombay Kannan@iitb - Ac.inDocumento31 páginasDifferential Equations Using Scilab: Kannan M. Moudgalya IIT Bombay Kannan@iitb - Ac.inGabriel DosirajaAinda não há avaliações
- MatrixDocumento26 páginasMatrixBattleBeex rabinoAinda não há avaliações
- JURNALDocumento18 páginasJURNAListiqamahAinda não há avaliações
- Alternative Optimal Power Flow FormulationsDocumento5 páginasAlternative Optimal Power Flow FormulationsHotatmoon HGAinda não há avaliações
- 5 - Production Planning problems-LPP ModelsDocumento7 páginas5 - Production Planning problems-LPP ModelsVishvajit KumbharAinda não há avaliações
- Quadratic & PolynomialDocumento2 páginasQuadratic & PolynomialceyoniAinda não há avaliações
- MTH501 Final Term Solved MCQs by JUNAIDDocumento30 páginasMTH501 Final Term Solved MCQs by JUNAIDMoon100% (2)
- Assignment 3 EDODocumento14 páginasAssignment 3 EDOHunny VermaAinda não há avaliações
- Summative Test 1Documento2 páginasSummative Test 1Charina OrtizAinda não há avaliações
- (Alain Bensoussan, Jens Frehse (Auth.), Philippe G, Partial Differentials EquationsDocumento431 páginas(Alain Bensoussan, Jens Frehse (Auth.), Philippe G, Partial Differentials EquationsSakura NguyenAinda não há avaliações