Você também pode gostar
- Freecad Fisl13Documento52 páginasFreecad Fisl13HigorNoronha100% (1)
- GU-E-371 Guia Projeto Detalhado (EXECUCAO) Mecanica Rev 3Documento13 páginasGU-E-371 Guia Projeto Detalhado (EXECUCAO) Mecanica Rev 3Jian MoraesAinda não há avaliações
- DISCERNINDO A VONTADE DE DEUSDocumento27 páginasDISCERNINDO A VONTADE DE DEUSlindembergh100% (1)
- Instruções para uso seguro de cesto acoplado em guindautoDocumento22 páginasInstruções para uso seguro de cesto acoplado em guindautojdlucas39 lucasAinda não há avaliações
- Bulk Flow GSIDocumento4 páginasBulk Flow GSICarlos Bercker Metalurgica BeckerAinda não há avaliações
- Análise Estrutural de Silos Metálicos PrismáticosDocumento7 páginasAnálise Estrutural de Silos Metálicos Prismáticospjustino1970Ainda não há avaliações
- CP-DMM-0001 - R0 - Critérios de ProjetoDocumento40 páginasCP-DMM-0001 - R0 - Critérios de ProjetoRodrigo MacedoAinda não há avaliações
- Dispositivos arrastadores e elevadores para transporte de sólidosDocumento46 páginasDispositivos arrastadores e elevadores para transporte de sólidosIsabela MarraAinda não há avaliações
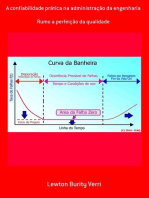
- A Confiabilidade Prática Na Administração Da EngenhariaNo EverandA Confiabilidade Prática Na Administração Da EngenhariaAinda não há avaliações
- ME - Noções de Implantação BIM - Modulo3 P01Documento64 páginasME - Noções de Implantação BIM - Modulo3 P01andreAinda não há avaliações
- Transporte de SolidosDocumento21 páginasTransporte de SolidosBianca Silva CordeiroAinda não há avaliações
- 10 - FelDocumento4 páginas10 - FelRafael Mayrink NunesAinda não há avaliações
- Trasnporte e Movimentação de Grãos PDFDocumento39 páginasTrasnporte e Movimentação de Grãos PDFFrenzy BritoAinda não há avaliações
- Candomblé de Ketu: origem e principais aspectos da nação africana no BrasilDocumento1 páginaCandomblé de Ketu: origem e principais aspectos da nação africana no BrasilWagner Barreto0% (1)
- ApresentarDocumento18 páginasApresentarASA HSM1500Ainda não há avaliações
- Dissertacao SilosDocumento78 páginasDissertacao SilosMarçal Chiusoli TononAinda não há avaliações
- Catálogo VedabrásDocumento326 páginasCatálogo VedabrásSilas Mendes0% (1)
- Apostila de Granéis - MackenzieDocumento114 páginasApostila de Granéis - MackenzieVídeos Legendados BrasilAinda não há avaliações
- Robô seguidor de linha com ArduinoDocumento15 páginasRobô seguidor de linha com Arduinoweslley100% (1)
- Catálogo de amortecedores VIBRA-STOPDocumento12 páginasCatálogo de amortecedores VIBRA-STOPSUELENAinda não há avaliações
- Dados técnicos reservatórioDocumento2 páginasDados técnicos reservatóriofrancisco junio da silva costaAinda não há avaliações
- Silos - Pressõe, Fluxo, Recomendações para ProjetoDocumento237 páginasSilos - Pressõe, Fluxo, Recomendações para ProjetoMatheus S. LimaAinda não há avaliações
- Catalogo AncoraDocumento156 páginasCatalogo AncoraDevide LimaAinda não há avaliações
- Correias Playtex Catalogo Geral PDFDocumento20 páginasCorreias Playtex Catalogo Geral PDFCarlos Bercker Metalurgica BeckerAinda não há avaliações
- Análise da Viabilidade do Transporte Hidroviário em Porto AlegreDocumento30 páginasAnálise da Viabilidade do Transporte Hidroviário em Porto AlegreFelipe DAvilaAinda não há avaliações
- General Roller Catalogo Produtos 2009Documento7 páginasGeneral Roller Catalogo Produtos 2009Silvio MoreiraAinda não há avaliações
- Engenharia Da ConfiabilidadeDocumento6 páginasEngenharia Da ConfiabilidadeYcaroAinda não há avaliações
- Cat G PecLeiteira 310517 (Web)Documento14 páginasCat G PecLeiteira 310517 (Web)Anderson Joel PortesAinda não há avaliações
- Tabela CBODocumento14 páginasTabela CBOJennifer Christine CAinda não há avaliações
- Plano Diretor de Caruaru Anexo III Planta de Zoneamento Caruaru SedeDocumento1 páginaPlano Diretor de Caruaru Anexo III Planta de Zoneamento Caruaru Sedefazio fariasAinda não há avaliações
- Transporte de Sólidos A GranelDocumento10 páginasTransporte de Sólidos A GranelBrunna Gabrielly da SilvaAinda não há avaliações
- Controle Da Poeira Gerada Por Minas À Céu AbertoDocumento8 páginasControle Da Poeira Gerada Por Minas À Céu AbertoNaiaraAinda não há avaliações
- Guia Bim AsBEA Fasciculo 2 PDFDocumento27 páginasGuia Bim AsBEA Fasciculo 2 PDFWeder Alves RodriguesAinda não há avaliações
- Resumos de Fisico Quimica Distancias No UniversoDocumento4 páginasResumos de Fisico Quimica Distancias No UniversoFranciscaAinda não há avaliações
- Adequação Da Correia Transportadora Da Oficina de Manutenção Senai - Civit Segundo Norma Regulamentadora #12Documento17 páginasAdequação Da Correia Transportadora Da Oficina de Manutenção Senai - Civit Segundo Norma Regulamentadora #12GUILHERME HENRIQUE CHALFUN RODRIGUESAinda não há avaliações
- Cavalete Auto Alinhante para Carga com RoletesDocumento1 páginaCavalete Auto Alinhante para Carga com RoletesJonathan W. V. BarreirosAinda não há avaliações
- Catálogo Sistemas de FixacaoDocumento123 páginasCatálogo Sistemas de FixacaoCapture brAinda não há avaliações
- Folha A3 - Superfície e tolerânciasDocumento1 páginaFolha A3 - Superfície e tolerânciasJonathan W. V. BarreirosAinda não há avaliações
- Suporte Básico Vida Pré-TesteDocumento2 páginasSuporte Básico Vida Pré-TesteMafalda Portas80% (5)
- Cálculo-transmissão-correia-VDocumento17 páginasCálculo-transmissão-correia-VThiago PereiraAinda não há avaliações
- Fertilizantes Minerais Simples PDFDocumento21 páginasFertilizantes Minerais Simples PDFCarlosBiazotoAinda não há avaliações
- Operação segura de empilhadeirasDocumento42 páginasOperação segura de empilhadeirasOtavio Fishermam MarinoAinda não há avaliações
- 40-49 Artigo Tecnico TermicaDocumento10 páginas40-49 Artigo Tecnico TermicaEverton MonteiroAinda não há avaliações
- Formatação de artigos acadêmicosDocumento10 páginasFormatação de artigos acadêmicossomaAinda não há avaliações
- ANEXO I - Especificações Dos Fertilizantes Minerais SimplesDocumento21 páginasANEXO I - Especificações Dos Fertilizantes Minerais SimplesPaulo Roberto de CarvalhoAinda não há avaliações
- 2018 Do Douglas Mateus de Lima Ppgec UfpeDocumento320 páginas2018 Do Douglas Mateus de Lima Ppgec UfpeDouglas MateusAinda não há avaliações
- Solidworks SimulationDocumento2 páginasSolidworks SimulationMaicon ZanchettinAinda não há avaliações
- Curso (Basico) Gestão de ProjetosDocumento51 páginasCurso (Basico) Gestão de ProjetosFernando Henrique MariottoAinda não há avaliações
- Catalogo Tecnico Da ImepelDocumento22 páginasCatalogo Tecnico Da ImepelJefersonSallesAinda não há avaliações
- Apostila Caustificaca oDocumento43 páginasApostila Caustificaca oAdriano SilvaAinda não há avaliações
- Etapas seleção elevadores canecaDocumento6 páginasEtapas seleção elevadores canecacortelinirosa100% (1)
- Manutenção em unidades de armazenamento de grãosDocumento6 páginasManutenção em unidades de armazenamento de grãosCeliomar AraújoAinda não há avaliações
- Jornal Comunitário LocalDocumento12 páginasJornal Comunitário LocalGisele NishiyamaAinda não há avaliações
- Transmissão+por+correia 28 02 2018Documento46 páginasTransmissão+por+correia 28 02 2018alanokdokAinda não há avaliações
- 13 - Transporte de SólidosDocumento26 páginas13 - Transporte de SólidosMiguelLorenzzoOliveiraAinda não há avaliações
- Guia de noções de física e cálculo de potência para acionamentosDocumento62 páginasGuia de noções de física e cálculo de potência para acionamentosDouglas GonzagaAinda não há avaliações
- Plano DiretorDocumento62 páginasPlano Diretorengenharia12546387Ainda não há avaliações
- Gerenciamento do projeto emDocumento3 páginasGerenciamento do projeto emBruno MendesAinda não há avaliações
- Declaração escopo projetoDocumento2 páginasDeclaração escopo projetoJuliano RibasAinda não há avaliações
- Rot OpenDocumento16 páginasRot OpenSebastian De Ossa RestrepoAinda não há avaliações
- Caracteristicas Do SecadorDocumento4 páginasCaracteristicas Do SecadorjonascamiloAinda não há avaliações
- 6 Sigma avaliação retenção conteúdoDocumento6 páginas6 Sigma avaliação retenção conteúdoMarluce Cristina Moraes DezorziAinda não há avaliações
- Projeto robô seguidor linhaDocumento14 páginasProjeto robô seguidor linhaJVDSC 1997Ainda não há avaliações
- Robo SumoDocumento13 páginasRobo SumoDiego Leite0% (1)
- Projeto de um robô hexápode controlado remotamente via ROSDocumento15 páginasProjeto de um robô hexápode controlado remotamente via ROSsamaraAinda não há avaliações
- Análise viabilidade econômica projetoDocumento7 páginasAnálise viabilidade econômica projetoSandra SouzaAinda não há avaliações
- Relatorio FetransDocumento7 páginasRelatorio FetransSandra SouzaAinda não há avaliações
- Adm AtpsDocumento9 páginasAdm Atpssandra0101Ainda não há avaliações
- Projeto BumblleDocumento16 páginasProjeto BumblleSandra SouzaAinda não há avaliações
- Relatório de Química2Documento6 páginasRelatório de Química2sandra0101Ainda não há avaliações
- Direitos HumanosDocumento5 páginasDireitos HumanosSandra SouzaAinda não há avaliações
- 1modelo Do Relatório ParcialDocumento14 páginas1modelo Do Relatório ParcialSandra SouzaAinda não há avaliações
- Relatorio RoboDocumento3 páginasRelatorio RoboSandra SouzaAinda não há avaliações
- Relatório de Hidrostática e CalorimetriaDocumento3 páginasRelatório de Hidrostática e CalorimetriaSandra SouzaAinda não há avaliações
- Análise viabilidade econômica projetoDocumento7 páginasAnálise viabilidade econômica projetoSandra SouzaAinda não há avaliações
- Sistema Administrativo I - Material de Apoio4Documento29 páginasSistema Administrativo I - Material de Apoio4Sandra SouzaAinda não há avaliações
- Atps Calculo NumericoDocumento9 páginasAtps Calculo Numericosandra0101Ainda não há avaliações
- Revista Aeross 2010 PDFDocumento84 páginasRevista Aeross 2010 PDF4ponto2Ainda não há avaliações
- ITQ - Resumo (Introd. Teologia)Documento8 páginasITQ - Resumo (Introd. Teologia)RobinsonAinda não há avaliações
- Maquina de GeloDocumento20 páginasMaquina de GeloPiterAinda não há avaliações
- Comandos elétricos e partida de motoresDocumento16 páginasComandos elétricos e partida de motoresAndrey FurquimAinda não há avaliações
- Copa2022horáriosDocumento10 páginasCopa2022horáriosAlex SimõesAinda não há avaliações
- Teoria Da CorDocumento25 páginasTeoria Da CorPaulo Emilio LagoAinda não há avaliações
- Tipos de incapacidade resultantes de acidentes de trabalhoDocumento1 páginaTipos de incapacidade resultantes de acidentes de trabalhoEster Machado DalilaAinda não há avaliações
- Lixadeiras ElétricaDocumento1 páginaLixadeiras ElétricaMauro JunioAinda não há avaliações
- Slide Aula 03Documento11 páginasSlide Aula 03André FreitasAinda não há avaliações
- Resenha do texto Sakhu sheti: retomando e reapropriando um foco psicológico afrocentradoDocumento1 páginaResenha do texto Sakhu sheti: retomando e reapropriando um foco psicológico afrocentradofelipe rochaAinda não há avaliações
- HeroínaDocumento8 páginasHeroínaDjully Rayanny FreireAinda não há avaliações
- Padrões visuais para hidrojateamentoDocumento28 páginasPadrões visuais para hidrojateamentoOtávio FernandesAinda não há avaliações
- Publicado 86611 2022-08-10Documento104 páginasPublicado 86611 2022-08-10Cleber Dos SantosAinda não há avaliações
- Lista de Exerccios 1 FsicaDocumento2 páginasLista de Exerccios 1 FsicaSamilly MariaAinda não há avaliações
- Representação Viril G MagazineDocumento71 páginasRepresentação Viril G MagazineRaphael FreireAinda não há avaliações
- Gladius AcessoDocumento9 páginasGladius Acessoleandro soaresAinda não há avaliações
- Reflexões Sobre A Paisagem Sonora Hospitalar: Musicalidade e Emoção Audível Na Perspectiva Filosófica de Victor ZuckerkandlDocumento24 páginasReflexões Sobre A Paisagem Sonora Hospitalar: Musicalidade e Emoção Audível Na Perspectiva Filosófica de Victor ZuckerkandlcrisdeoAinda não há avaliações
- Texto - Garotas de Programa em TeresinaDocumento14 páginasTexto - Garotas de Programa em TeresinaM Sousa RodriguesAinda não há avaliações
- Líquido sinovial: composição e examesDocumento16 páginasLíquido sinovial: composição e examesEveraldo BernadoAinda não há avaliações
- Ao Cair Da Tarde ProgramacaoDocumento3 páginasAo Cair Da Tarde ProgramacaoGustavo MatiasAinda não há avaliações
- 74 - Manual Do Usuario - HyBaseDocumento96 páginas74 - Manual Do Usuario - HyBaseRodrigo CamposAinda não há avaliações
- Livro Texto - Unidade IDocumento71 páginasLivro Texto - Unidade IYasnaia OliveiraAinda não há avaliações
- Eq7 Analise e Desenvolvimento de Sistemas v2Documento3 páginasEq7 Analise e Desenvolvimento de Sistemas v2Thiago NavarroAinda não há avaliações
- Biotina PDFDocumento3 páginasBiotina PDFGuilherme GiacominniAinda não há avaliações
- Rugby - Sinais de ArbitragemDocumento8 páginasRugby - Sinais de ArbitragemJacknietAinda não há avaliações