Você também pode gostar
- TALLER PRIMER PARCIAL MICROS 2 ElkinDocumento6 páginasTALLER PRIMER PARCIAL MICROS 2 ElkinSebastian ZuluagaAinda não há avaliações
- Practica Unidad 4 Electronica de PotenciaDocumento15 páginasPractica Unidad 4 Electronica de PotenciaAdriana AyalaAinda não há avaliações
- Arquitectura interna PIC 16F887 y PIC 18F4550Documento19 páginasArquitectura interna PIC 16F887 y PIC 18F4550Kathleen Leblanc100% (1)
- Felicidad-comparación conceptualDocumento5 páginasFelicidad-comparación conceptualAdrianRmz100% (4)
- Fundamentos de Manufactura Moderna: Materiales, Procesos y Sistemas by Mikell P. GrooverDocumento823 páginasFundamentos de Manufactura Moderna: Materiales, Procesos y Sistemas by Mikell P. GrooverAdrianRmz60% (42)
- Análisis para La Restauración Del Hospicio ManriqueDocumento208 páginasAnálisis para La Restauración Del Hospicio ManriqueAndre RossiAinda não há avaliações
- La Función de TransferenciaDocumento3 páginasLa Función de TransferenciaGabrielle PotterAinda não há avaliações
- Informe Conversor Ac Ac..Documento18 páginasInforme Conversor Ac Ac..Gloria Constanza Garzón Peña100% (1)
- Informe 01 FuenteDocumento5 páginasInforme 01 FuenteSG JesgAinda não há avaliações
- Sistemas de Lazo Cerrado en el Proceso de Trillado de ArrozDocumento4 páginasSistemas de Lazo Cerrado en el Proceso de Trillado de ArrozSergio PootAinda não há avaliações
- CONCLUSION Circuito de AlarmasDocumento1 páginaCONCLUSION Circuito de AlarmasRafael Perez AguirreAinda não há avaliações
- Compensador de fase pasivoDocumento14 páginasCompensador de fase pasivoDaniel Reyes Vasquez100% (1)
- 6.4. Control de VelocidadDocumento1 página6.4. Control de VelocidadMiguel MartínezAinda não há avaliações
- Control PID de un circuito RLCDocumento7 páginasControl PID de un circuito RLCMarisol Tancara RoqueAinda não há avaliações
- Cómo Hacer Un Indicador de Nivel de AguaDocumento10 páginasCómo Hacer Un Indicador de Nivel de AguaRicardo.uricoecheaAinda não há avaliações
- Practica 1 Sistemas de ControlDocumento4 páginasPractica 1 Sistemas de ControlErick SilvaAinda não há avaliações
- Principios de Generacion de C.A.Documento27 páginasPrincipios de Generacion de C.A.juanhumbertosaldaAinda não há avaliações
- Llenado automático tanque sensoresDocumento9 páginasLlenado automático tanque sensoresEriberto Rodriguez Perez100% (1)
- Criterios de ErrorDocumento9 páginasCriterios de ErrorKarloz CázaresAinda não há avaliações
- Control de Motores ResumenDocumento13 páginasControl de Motores ResumenErick jh Herrera CondoriAinda não há avaliações
- El Lugar Geométrico de RaicesDocumento14 páginasEl Lugar Geométrico de RaicesLuis LAinda não há avaliações
- Ventajas de Lazo Cerrado y AbiertoDocumento2 páginasVentajas de Lazo Cerrado y Abiertohassan9705100% (1)
- Control de Fase DirectoDocumento30 páginasControl de Fase DirectoAbiel RosaAinda não há avaliações
- G (S) S (s+50) (s+100) : Trazar El Lugar Directo e Inverso de Las Raíces para El Sistema Cuya FTLD Es La SiguienteDocumento3 páginasG (S) S (s+50) (s+100) : Trazar El Lugar Directo e Inverso de Las Raíces para El Sistema Cuya FTLD Es La SiguienteTu Amorsito EdwinAinda não há avaliações
- CRS Robotics CorporationDocumento5 páginasCRS Robotics CorporationAlfredoAinda não há avaliações
- UNIDAD 5 Variador de VelocidadDocumento9 páginasUNIDAD 5 Variador de VelocidadJuan JimenesAinda não há avaliações
- Exposicion CD CDDocumento2 páginasExposicion CD CDfabbynandaAinda não há avaliações
- Cuestionario SensoresDocumento8 páginasCuestionario SensoresJosé Ignacio Sanz CastroAinda não há avaliações
- Control de Motor Electrico Trifasico Por Estacion de Botones para Control ReversibleDocumento6 páginasControl de Motor Electrico Trifasico Por Estacion de Botones para Control ReversibleAdrian Millan MartinezAinda não há avaliações
- Reporte de Práctica Puente H Con RelevadoresDocumento2 páginasReporte de Práctica Puente H Con RelevadoresAlexis Hernandez100% (1)
- Normas NEMA guíaDocumento10 páginasNormas NEMA guíaSergio MarcialAinda não há avaliações
- Fase 2Documento2 páginasFase 2jwjuAinda não há avaliações
- I PARTE Circuitos ControlDocumento79 páginasI PARTE Circuitos ControlJosue HasbunAinda não há avaliações
- Maquinas Electricas - Correcion y Ajuste Del F.PDocumento8 páginasMaquinas Electricas - Correcion y Ajuste Del F.Proberto dario perez verdugoAinda não há avaliações
- Control automático: ajuste de la respuesta transitoria y de estado estacionarioDocumento46 páginasControl automático: ajuste de la respuesta transitoria y de estado estacionarioFrank CandoAinda não há avaliações
- Diagrama Ediagrama en Bloques Del Inversorn Bloques Del InversorDocumento3 páginasDiagrama Ediagrama en Bloques Del Inversorn Bloques Del InversorWilliam Gutierrez100% (1)
- Reconocimiento de Placas Usando Matlab - Proyecto DSP 2.0Documento4 páginasReconocimiento de Placas Usando Matlab - Proyecto DSP 2.0Nickolae Quintanilla ChavezAinda não há avaliações
- Sistemas Computarizados de Administración de MantenimientoDocumento3 páginasSistemas Computarizados de Administración de MantenimientoJulio Carrero100% (1)
- Codificación BPSK Demo Lab 12Documento13 páginasCodificación BPSK Demo Lab 12Merly ElizaAinda não há avaliações
- 5ta Asignación Teoria de ControlDocumento14 páginas5ta Asignación Teoria de ControlstefannyAinda não há avaliações
- Control Robusto (Grupo 4 Trabajo)Documento18 páginasControl Robusto (Grupo 4 Trabajo)Raul CondoriAinda não há avaliações
- Generadores síncronos y motores: frecuencia, voltaje y parDocumento10 páginasGeneradores síncronos y motores: frecuencia, voltaje y parJuan Carlos MojicaAinda não há avaliações
- Ventajas de los motores CCDocumento3 páginasVentajas de los motores CCDann SanzAinda não há avaliações
- Matemáticas Básicas en LabVIEWDocumento2 páginasMatemáticas Básicas en LabVIEWJavier VenturaAinda não há avaliações
- Unidad I. - Componentes y Aspectos de Construcción de Una Maquina de CDDocumento16 páginasUnidad I. - Componentes y Aspectos de Construcción de Una Maquina de CDJorge MartinezAinda não há avaliações
- Paralelo de Las Maquinas SincronasDocumento3 páginasParalelo de Las Maquinas Sincronasfer6669993Ainda não há avaliações
- Tutorial AdamsDocumento19 páginasTutorial AdamsJüan RojasAinda não há avaliações
- Reporte Arranque y Paro Con PLCDocumento11 páginasReporte Arranque y Paro Con PLCClaudio Martinez CastroAinda não há avaliações
- Control Estatico de Motores ElectricosDocumento13 páginasControl Estatico de Motores Electricossteven somarriba0% (1)
- Conectar Arduino Al TVDocumento5 páginasConectar Arduino Al TVjoseregistroAinda não há avaliações
- Reporte Practica 1 Electronica DigitalDocumento10 páginasReporte Practica 1 Electronica DigitalSelinaAinda não há avaliações
- 1.1.-Fundamentos de Sistemas Digitales y NumericosDocumento3 páginas1.1.-Fundamentos de Sistemas Digitales y NumericosFelixCabreraAinda não há avaliações
- Las Plataformas CAM y Su Importancia en La IndustriaDocumento2 páginasLas Plataformas CAM y Su Importancia en La IndustriaOziel Gutierrez CarranzaAinda não há avaliações
- Primer Parcial 2020 PDFDocumento61 páginasPrimer Parcial 2020 PDFMaxter Dragon100% (1)
- Control velocidad motor DCDocumento3 páginasControl velocidad motor DCJosé AlanizAinda não há avaliações
- La Puesta en Marcha de Un Comparador Utilizando Amplificadores OperacionalesDocumento6 páginasLa Puesta en Marcha de Un Comparador Utilizando Amplificadores OperacionalesDIAZ YORDYAinda não há avaliações
- Servo Motor EsDocumento20 páginasServo Motor EsJoseAntonioAinda não há avaliações
- Qué es un servomotor y para qué sirveDocumento6 páginasQué es un servomotor y para qué sirveLourdes Mamani LecoñaAinda não há avaliações
- Servomotores ResumenDocumento4 páginasServomotores ResumenNaty FajardoAinda não há avaliações
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209No EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Nota: 1 de 5 estrelas1/5 (2)
- Posicionado y control de la estructura en bancada. TMVL0309No EverandPosicionado y control de la estructura en bancada. TMVL0309Ainda não há avaliações
- UF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoNo EverandUF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoNota: 4 de 5 estrelas4/5 (4)
- Montaje de instalaciones automatizadas. ELEE0109No EverandMontaje de instalaciones automatizadas. ELEE0109Ainda não há avaliações
- Perlas Negras - Amado Nervo 1896Documento8 páginasPerlas Negras - Amado Nervo 1896AdrianRmzAinda não há avaliações
- Reglas Ziegler-Nichols sintonizar PIDDocumento11 páginasReglas Ziegler-Nichols sintonizar PIDAdrianRmzAinda não há avaliações
- Antologia Control de ProcesosDocumento30 páginasAntologia Control de ProcesosAdrianRmz100% (2)
- Ejemplo de Aplicación Electro NeumáticaDocumento8 páginasEjemplo de Aplicación Electro NeumáticaAdrianRmzAinda não há avaliações
- Fisica Cuantica - Analisis Filosfico.Documento3 páginasFisica Cuantica - Analisis Filosfico.AdrianRmzAinda não há avaliações
- Recopilación de Los Principales Comandos en Codigo GDocumento3 páginasRecopilación de Los Principales Comandos en Codigo GAdrianRmzAinda não há avaliações
- Qué Son Los Derechos de AutorDocumento6 páginasQué Son Los Derechos de AutorAdrianRmzAinda não há avaliações
- Actividades PreventivasDocumento4 páginasActividades PreventivasAdrianRmzAinda não há avaliações
- Poemas de Amor Eterno PDFDocumento39 páginasPoemas de Amor Eterno PDFBruno SantanderAinda não há avaliações
- Control Secuencial de Cuatro CompresoresDocumento0 páginaControl Secuencial de Cuatro CompresoresJesus EstebanAinda não há avaliações
- 2.1 Antecedentes HidraulicaDocumento17 páginas2.1 Antecedentes HidraulicaAdrianRmz100% (4)
- Vib 2gdlDocumento12 páginasVib 2gdlamadeuswalAinda não há avaliações
- Oscilaciones Lineales Con Varios Grados de LibertadDocumento32 páginasOscilaciones Lineales Con Varios Grados de LibertadAdrianRmzAinda não há avaliações
- Sin PassDocumento1 páginaSin PassAdrianRmzAinda não há avaliações
- DerivadaDocumento7 páginasDerivadaAdrianRmzAinda não há avaliações
- El Comunismo PrimitivoDocumento12 páginasEl Comunismo PrimitivoivasitonAinda não há avaliações
- Informe Cartaboneo 13.02.16Documento13 páginasInforme Cartaboneo 13.02.16Isaias ShicaAinda não há avaliações
- Grado 6 ArtísticaDocumento2 páginasGrado 6 ArtísticaUnidad Educación UGAinda não há avaliações
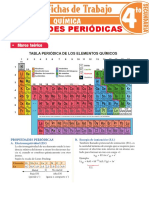
- Propiedades Periodicas para Cuarto Grado de SecundariaDocumento5 páginasPropiedades Periodicas para Cuarto Grado de SecundariaLeandroCarlosManayayAinda não há avaliações
- Maquinaria PesadaDocumento18 páginasMaquinaria PesadaJorge Luis Medina ManzanoAinda não há avaliações
- Sesion 4-Inicial-14-09-2023Documento13 páginasSesion 4-Inicial-14-09-2023GermerBirginioClementeIsidroAinda não há avaliações
- Conta de Gerencia Preguntas LaboratorioDocumento3 páginasConta de Gerencia Preguntas LaboratorioPaul Dalhy ZapataAinda não há avaliações
- Psicopatologia y Contexto Fase 1Documento4 páginasPsicopatologia y Contexto Fase 1Laura ForeroAinda não há avaliações
- Análisis FODADocumento7 páginasAnálisis FODAJudingInternacional0% (1)
- Balotario - Ciencias Sociales 5 SecundariaDocumento3 páginasBalotario - Ciencias Sociales 5 SecundariaRonald Antezana DelgadoAinda não há avaliações
- Empresas públicas vs privadasDocumento7 páginasEmpresas públicas vs privadasloba gambaAinda não há avaliações
- Diseño de Una Planta Deshidratadora de Banano Usando Secador de Gabinetes para La Producción de HarinaDocumento6 páginasDiseño de Una Planta Deshidratadora de Banano Usando Secador de Gabinetes para La Producción de HarinajuniorAinda não há avaliações
- 3 El Lenguaje en La MedicinaDocumento4 páginas3 El Lenguaje en La MedicinaDerrardja YounesAinda não há avaliações
- Modelamiento Entrada SalidaDocumento29 páginasModelamiento Entrada SalidaSANDOVAL ANDREA VALENTINA NORE�AAinda não há avaliações
- Decálogo del perfecto cuentistaDocumento7 páginasDecálogo del perfecto cuentistaAna Rita VillarAinda não há avaliações
- Enfoques económicos y relaciones interdisciplinariasDocumento3 páginasEnfoques económicos y relaciones interdisciplinariasGherveth Santis SantizoAinda não há avaliações
- IASB: La Junta de Normas Internacionales de ContabilidadDocumento7 páginasIASB: La Junta de Normas Internacionales de ContabilidadLUZ MERCEDES CONDORI RAMOSAinda não há avaliações
- Guía MusescoreDocumento259 páginasGuía MusescoreDiego Sebastián García100% (1)
- Taller Expresiones Regulares PDFDocumento3 páginasTaller Expresiones Regulares PDFGerardo AraqueAinda não há avaliações
- 1154-Texto del artículo-1170-1-10-20240118Documento22 páginas1154-Texto del artículo-1170-1-10-20240118Milagros VeraAinda não há avaliações
- MG Mg5 Ficha TecnicaDocumento2 páginasMG Mg5 Ficha TecnicaMarcos André Marroquin PachecoAinda não há avaliações
- OACE - Unidad1 - Implantacion de Sistemas OperativosDocumento25 páginasOACE - Unidad1 - Implantacion de Sistemas OperativosManuel Ángel Garrido TorresAinda não há avaliações
- Manual Cultura 1 PDFDocumento86 páginasManual Cultura 1 PDFSebastian CortesAinda não há avaliações
- PROGRAMA ANALÍTICO 1° Mate PDF AprendizajeDocumento1 páginaPROGRAMA ANALÍTICO 1° Mate PDF Aprendizajeddsn7pjvnvAinda não há avaliações
- Guía aprendizaje sistemas CNDocumento6 páginasGuía aprendizaje sistemas CNMauricio Alejandro Riquelme AguirreAinda não há avaliações
- Determinacion Del Requerimiento Hidrico Del Cultivo de LechugaDocumento6 páginasDeterminacion Del Requerimiento Hidrico Del Cultivo de LechugaMICHELLE STEFANY CAIZA CLAVIJOAinda não há avaliações
- Actividad Estructura de La Industria Semana 8Documento6 páginasActividad Estructura de La Industria Semana 8Yobana Romero100% (1)
- Plan de Desarrollo-CEDAP-Al 2018 (Por Aprobarse)Documento61 páginasPlan de Desarrollo-CEDAP-Al 2018 (Por Aprobarse)Javier Perez SanchezAinda não há avaliações
- Exclusion de HerederoDocumento9 páginasExclusion de HerederoHugo AlegreAinda não há avaliações