Você também pode gostar
- Interface PropertiesDocumento5 páginasInterface PropertiesSukhamMichaelAinda não há avaliações
- Current MBDA R&T Effort On Ram/Scramjet and Detonation Wave EngineDocumento24 páginasCurrent MBDA R&T Effort On Ram/Scramjet and Detonation Wave Engine고현Ainda não há avaliações
- A Static Combustion Study On Fuel Rich Propellant For Ducted Rocket Gas GeneratorDocumento13 páginasA Static Combustion Study On Fuel Rich Propellant For Ducted Rocket Gas Generator고현Ainda não há avaliações
- Contract Extension AgreementDocumento1 páginaContract Extension Agreement고현Ainda não há avaliações
- Contract Extension AgreementDocumento1 páginaContract Extension Agreement고현Ainda não há avaliações
- Meteor: Beyond Visual Range Air-To-Air Missile (Bvraam)Documento2 páginasMeteor: Beyond Visual Range Air-To-Air Missile (Bvraam)Manuel SolisAinda não há avaliações
- GST INVOICE FORMAT - Jan2020Documento1 páginaGST INVOICE FORMAT - Jan2020고현Ainda não há avaliações
- Cits 2000Documento148 páginasCits 2000고현Ainda não há avaliações
- Contract Extension AgreementDocumento1 páginaContract Extension Agreement고현Ainda não há avaliações
- Whats NewDocumento2 páginasWhats New고현Ainda não há avaliações
- Verification of steam ejector refrigeration model performanceDocumento8 páginasVerification of steam ejector refrigeration model performance고현Ainda não há avaliações
- Get TRDocDocumento65 páginasGet TRDoc고현Ainda não há avaliações
- Optimization of IGCC Processes With Reduced Order CFD ModelsDocumento28 páginasOptimization of IGCC Processes With Reduced Order CFD Models고현Ainda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- AOP 7EnergeticsQualDocumento666 páginasAOP 7EnergeticsQualsullivbtAinda não há avaliações
- The Primary RC Airplane ControlsDocumento6 páginasThe Primary RC Airplane ControlsaayushsananAinda não há avaliações
- Nasa Lego Lunar Lander 10266Documento124 páginasNasa Lego Lunar Lander 10266Steve BrysonAinda não há avaliações
- Exercise SatelliteDocumento2 páginasExercise SatelliteVimala ElumalaiAinda não há avaliações
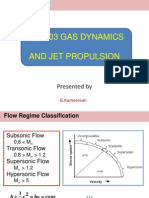
- Me 1303 Gas Dynamics and Jet Propulsion: Presented byDocumento24 páginasMe 1303 Gas Dynamics and Jet Propulsion: Presented byArul SankaranAinda não há avaliações
- ROCKET BOOSTERSDocumento16 páginasROCKET BOOSTERSCrystalsAinda não há avaliações
- MATLAB: Rocket Launcher SimulationDocumento4 páginasMATLAB: Rocket Launcher SimulationAhsan NaeemAinda não há avaliações
- Tcds A37ce Rev 16Documento10 páginasTcds A37ce Rev 16Elmer VillegasAinda não há avaliações
- A320 Study GuideDocumento32 páginasA320 Study GuideTarik Benzineb100% (4)
- Rocket Science: Forces, Design, and FlightDocumento2 páginasRocket Science: Forces, Design, and FlighttguthrieAinda não há avaliações
- Space Tourism: An Overview of Orbital, Sub-Orbital and Lunar Space TourismDocumento16 páginasSpace Tourism: An Overview of Orbital, Sub-Orbital and Lunar Space TourismAtul TAinda não há avaliações
- Phoenix Project Plan R2020.06.09Documento10 páginasPhoenix Project Plan R2020.06.09Wenli YangAinda não há avaliações
- Wheels Stop The Tragedies and Triumphs of The Space Shuttle Program, 1986-2011 (Rick Houston, Jerry Ross)Documento456 páginasWheels Stop The Tragedies and Triumphs of The Space Shuttle Program, 1986-2011 (Rick Houston, Jerry Ross)Elga Pramono Putri100% (1)
- NacaDocumento6 páginasNacadanteunmsmAinda não há avaliações
- Omega Speedmaster Aka. MoonwatchDocumento14 páginasOmega Speedmaster Aka. MoonwatchSimon László100% (1)
- Thrust Into Space PDFDocumento125 páginasThrust Into Space PDFruslanagAinda não há avaliações
- Aerodynamis Project of Arun PrabhathDocumento8 páginasAerodynamis Project of Arun PrabhathMano Har100% (1)
- 01 Takeoff Data 747 400 V10Documento26 páginas01 Takeoff Data 747 400 V10jeffmfAinda não há avaliações
- Fiche cfm56-5c Ang1Documento2 páginasFiche cfm56-5c Ang1hamidrezachamaniAinda não há avaliações
- Simple Plane AssemblyDocumento2 páginasSimple Plane AssemblyMugenAinda não há avaliações
- Projectile MotionDocumento16 páginasProjectile MotionDharshana pjrAinda não há avaliações
- Classification of MissileDocumento4 páginasClassification of MissileGokulnath RamachandranAinda não há avaliações
- NASA Mercury-Redstone 4 - Liberty Bell 7 Mission ReportDocumento58 páginasNASA Mercury-Redstone 4 - Liberty Bell 7 Mission ReportOrion2015Ainda não há avaliações
- CELESTIAL MECHANICS: Elliptic Orbits, Orbital Transfers, and RendezvousDocumento30 páginasCELESTIAL MECHANICS: Elliptic Orbits, Orbital Transfers, and RendezvousafaqihudinAinda não há avaliações
- DCS SU-27/33 Flanker Keyboard MapDocumento2 páginasDCS SU-27/33 Flanker Keyboard MapAnthony JiAinda não há avaliações
- 2007 Belleville Washer TestingDocumento22 páginas2007 Belleville Washer Testingibis_pilotAinda não há avaliações
- The Saturn S II PDFDocumento16 páginasThe Saturn S II PDFedkyle99Ainda não há avaliações
- 1 Revolving and RotatingDocumento3 páginas1 Revolving and Rotatingmachinel1983Ainda não há avaliações
- R-29 SLBM familyDocumento3 páginasR-29 SLBM familyDIOMEDES CRISPIN LLANTOYAinda não há avaliações
- Type Cert A718Documento6 páginasType Cert A718skatterbrainkidAinda não há avaliações