Você também pode gostar
- 333 High Frequency GRE Words With MeaningsDocumento4 páginas333 High Frequency GRE Words With Meaningsvysakhpillai100% (4)
- Patternsynth Rev PDFDocumento11 páginasPatternsynth Rev PDFstepannpAinda não há avaliações
- Nnat Sample B Final ProductDocumento12 páginasNnat Sample B Final Productstepannp100% (2)
- SystemLevelRadioIssues KuhnDocumento47 páginasSystemLevelRadioIssues KuhnstepannpAinda não há avaliações
- Pattern Synth Review Hansen PDFDocumento11 páginasPattern Synth Review Hansen PDFstepannpAinda não há avaliações
- Design of A Class F Power Amplifier: Piers O V NDocumento4 páginasDesign of A Class F Power Amplifier: Piers O V NstepannpAinda não há avaliações
- Vna MW - 25Documento24 páginasVna MW - 25stepannpAinda não há avaliações
- Focus On TransmittersandReceivers MWRFeBookDocumento14 páginasFocus On TransmittersandReceivers MWRFeBookstepannpAinda não há avaliações
- Radar EbDocumento22 páginasRadar Ebfcodelpuerto0% (1)
- ADS LNA Simulation ExampleDocumento27 páginasADS LNA Simulation ExampleChandra Praveen MahalingamAinda não há avaliações
- RFIC Inductor ToolkitDocumento39 páginasRFIC Inductor ToolkitstepannpAinda não há avaliações
- PSpice - Advanced Analysis - User GuideDocumento208 páginasPSpice - Advanced Analysis - User GuideRay ChandraAinda não há avaliações
- Focus On 5G - QorvoDocumento17 páginasFocus On 5G - QorvostepannpAinda não há avaliações
- Tutorial: Getting Started With RFIC Inductor ToolkitDocumento25 páginasTutorial: Getting Started With RFIC Inductor ToolkitSajeendran Saji B SAinda não há avaliações
- 以下為常用的鍵盤快速鍵操作:T - 切換透明模式Q - 快速量測QL - 量測報表 GP - 開啟/關閉極座標格線X - 開啟/關閉文字框P - 列印O - 開啟檔案S - 儲存Z - 撤銷Y - 重做ESC - 取消操作Keyboard Shortcuts 32 選擇指令: 線段(LineDocumento233 páginas以下為常用的鍵盤快速鍵操作:T - 切換透明模式Q - 快速量測QL - 量測報表 GP - 開啟/關閉極座標格線X - 開啟/關閉文字框P - 列印O - 開啟檔案S - 儲存Z - 撤銷Y - 重做ESC - 取消操作Keyboard Shortcuts 32 選擇指令: 線段(LinestepannpAinda não há avaliações
- TRGaN PDFDocumento7 páginasTRGaN PDFstepannpAinda não há avaliações
- 70 W GaN-HEMT Ku-Band Power Amplifier in MIC TechnologyDocumento12 páginas70 W GaN-HEMT Ku-Band Power Amplifier in MIC TechnologystepannpAinda não há avaliações
- Bias Circuit Design For Microwave AmplifiersDocumento7 páginasBias Circuit Design For Microwave AmplifiersPhilippeaAinda não há avaliações
- GREVocabulary FlashcardsDocumento24 páginasGREVocabulary FlashcardsstepannpAinda não há avaliações
- X-BAND SUBSYSTEM FOR HIGH-DATA CUBESATSDocumento10 páginasX-BAND SUBSYSTEM FOR HIGH-DATA CUBESATSstepannpAinda não há avaliações
- Multidimensional Measurements On RF Power AmplifiersDocumento43 páginasMultidimensional Measurements On RF Power AmplifiersstepannpAinda não há avaliações
- Hfss Tutorial Fed Bowtie AntennaDocumento21 páginasHfss Tutorial Fed Bowtie AntennastepannpAinda não há avaliações
- 17 Vnese SopsDocumento41 páginas17 Vnese SopsThien LeAinda não há avaliações
- Gre Issue EssaysDocumento192 páginasGre Issue EssaysAnudeep Bablu100% (1)
- Gremath Set11Documento22 páginasGremath Set11api-3805495Ainda não há avaliações
- Gremath Set11Documento22 páginasGremath Set11api-3805495Ainda não há avaliações
- Gremath Set01Documento25 páginasGremath Set01stepannp100% (1)
- GRE Root Words FlashcardsDocumento10 páginasGRE Root Words Flashcardsshaliniark100% (1)
- Speaking NotesDocumento10 páginasSpeaking NotespolmkiAinda não há avaliações
- 5 Amplifier Families Basic CharacteristicsDocumento4 páginas5 Amplifier Families Basic CharacteristicsNguyen QuangAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- MPLAB XC16 C Compiler Users Guide DS50002071 PDFDocumento413 páginasMPLAB XC16 C Compiler Users Guide DS50002071 PDFJuan Fabian MoralesAinda não há avaliações
- Troubleshooting Guide PDFDocumento48 páginasTroubleshooting Guide PDFFrancisco Diaz67% (3)
- Mysql Installation Path Apache Server DirectoryDocumento2 páginasMysql Installation Path Apache Server DirectorySergey DemchukAinda não há avaliações
- Rust Programming Cheat Sheet: IncludesDocumento2 páginasRust Programming Cheat Sheet: IncludesmutecamelAinda não há avaliações
- Software Assisted Hardware Verification: About CoverifyDocumento4 páginasSoftware Assisted Hardware Verification: About CoverifypuneetSchemeAinda não há avaliações
- FileDocumento651 páginasFileSony Neyyan VargheseAinda não há avaliações
- Unnamed Asset Sharedassets6.Assets 1 PreloadDataDocumento17 páginasUnnamed Asset Sharedassets6.Assets 1 PreloadDataJuthi RahmanAinda não há avaliações
- MRC Framework for Nested and Flat NERDocumento11 páginasMRC Framework for Nested and Flat NERBiết KhôngAinda não há avaliações
- CSS Conditional Cheat SheetDocumento2 páginasCSS Conditional Cheat SheetJeremy JaredAinda não há avaliações
- First Generation of Hmi Catalog enDocumento20 páginasFirst Generation of Hmi Catalog enMadhun SickAinda não há avaliações
- Colorful Creative Illustration Digital Brainstorm PresentationDocumento15 páginasColorful Creative Illustration Digital Brainstorm PresentationPrincess Ara AtatadoAinda não há avaliações
- Lab Assignment #1 Introduction To Geographic Data 1. LogisticsDocumento16 páginasLab Assignment #1 Introduction To Geographic Data 1. LogisticsIgo CandeeiroAinda não há avaliações
- Operating Instructions Inspector I10 I20 I40 en IM0046041Documento104 páginasOperating Instructions Inspector I10 I20 I40 en IM0046041Diogo FiaesAinda não há avaliações
- Sybex CCNA 640-802 Chapter 04Documento19 páginasSybex CCNA 640-802 Chapter 04xkerberosxAinda não há avaliações
- Simputer MainDocumento21 páginasSimputer MainPramiti ParasharAinda não há avaliações
- Pascal - Timesheet Periode Tahun 2020-2021Documento30 páginasPascal - Timesheet Periode Tahun 2020-2021pascalAinda não há avaliações
- MicrocontrollersDocumento62 páginasMicrocontrollerspahulAinda não há avaliações
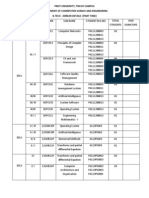
- Prist University, Trichy Campus Department of Comnputer Science and Engineering B.Tech - Arrear Details (Part Time)Documento2 páginasPrist University, Trichy Campus Department of Comnputer Science and Engineering B.Tech - Arrear Details (Part Time)diltvkAinda não há avaliações
- Modicon TSX Micro - TSX3721101Documento6 páginasModicon TSX Micro - TSX3721101Andalan Sumber UnggulAinda não há avaliações
- EG8145X6-10 Datasheet 01 (R22C00)Documento4 páginasEG8145X6-10 Datasheet 01 (R22C00)Jose RojasAinda não há avaliações
- Networking Fundamentals SolutionsDocumento14 páginasNetworking Fundamentals SolutionsEVAN MARSHALLAinda não há avaliações
- Microsoft Windows XP - List of Security Vulnerabilities 2Documento5 páginasMicrosoft Windows XP - List of Security Vulnerabilities 2rehmanroyalsAinda não há avaliações
- ResumeDocumento1 páginaResumechirag m oAinda não há avaliações
- Easter Exercise For B2Documento1 páginaEaster Exercise For B2gabi dulgheruAinda não há avaliações
- VIM For SAP Solutions 20.4 Installation Guide English VIM200400 IGD en 09 PDFDocumento266 páginasVIM For SAP Solutions 20.4 Installation Guide English VIM200400 IGD en 09 PDFyoeesefAinda não há avaliações
- Me Project CRM SpringDocumento15 páginasMe Project CRM SpringRameshAinda não há avaliações
- R24 System Diagram: AMD OntarioDocumento36 páginasR24 System Diagram: AMD OntarioRicardo SilvaAinda não há avaliações
- Dark Patterns in E-Commerce: A Dataset and Its Baseline EvaluationsDocumento8 páginasDark Patterns in E-Commerce: A Dataset and Its Baseline Evaluationsrachana.aAinda não há avaliações
- Android Based Object Detection Application For Food ItemsDocumento6 páginasAndroid Based Object Detection Application For Food ItemsHafza GhafoorAinda não há avaliações
- Java All GTU Programs 06012015 051359AMDocumento23 páginasJava All GTU Programs 06012015 051359AMRohitAinda não há avaliações