Você também pode gostar
- Matlab FileDocumento16 páginasMatlab FileAvdesh Pratap Singh GautamAinda não há avaliações
- Objectively Summarize The Most Important Aspects of The StudyDocumento2 páginasObjectively Summarize The Most Important Aspects of The StudyNasiaZantiAinda não há avaliações
- Introduction To Neural Networks For Senior Design: August 9 - 12, 2004 Intro-1Documento33 páginasIntroduction To Neural Networks For Senior Design: August 9 - 12, 2004 Intro-1ucmatik1043Ainda não há avaliações
- Filtering Noises From Speech Signal: A BPNN ApproachDocumento4 páginasFiltering Noises From Speech Signal: A BPNN Approacheditor_ijarcsseAinda não há avaliações
- Suhasini ECE 170103015 1000009511 PDFDocumento18 páginasSuhasini ECE 170103015 1000009511 PDFvivekAinda não há avaliações
- Applied Neural Networks For Predicting Approximate Structural Response Behavior Using Learning and Design ExperienceDocumento15 páginasApplied Neural Networks For Predicting Approximate Structural Response Behavior Using Learning and Design ExperienceRamprasad SrinivasanAinda não há avaliações
- ANN PG Module1Documento75 páginasANN PG Module1Sreerag Kunnathu SugathanAinda não há avaliações
- The Neural-Network Analysis & Its Applications Data Filters: Saint-Petersburg State University JASS 2006Documento77 páginasThe Neural-Network Analysis & Its Applications Data Filters: Saint-Petersburg State University JASS 2006abdullahsaeed47Ainda não há avaliações
- D.Y. Patil College of Engineering, Akurdi Department of Electronics & Telecommunication EngineeringDocumento41 páginasD.Y. Patil College of Engineering, Akurdi Department of Electronics & Telecommunication EngineeringP SAinda não há avaliações
- Neural Networks (Review) : Piero P. Bonissone GE Corporate Research & DevelopmentDocumento16 páginasNeural Networks (Review) : Piero P. Bonissone GE Corporate Research & Developmentvani_V_prakashAinda não há avaliações
- Chapter 9Documento9 páginasChapter 9Raja ManikamAinda não há avaliações
- Paper 2Documento3 páginasPaper 2RakeshconclaveAinda não há avaliações
- Institute For Advanced Management Systems Research Department of Information Technologies Abo Akademi UniversityDocumento41 páginasInstitute For Advanced Management Systems Research Department of Information Technologies Abo Akademi UniversityKarthikeyanAinda não há avaliações
- Multiple-Layer Networks Backpropagation AlgorithmsDocumento46 páginasMultiple-Layer Networks Backpropagation AlgorithmsZa'imahPermatasariAinda não há avaliações
- A Systolic Array Exploiting The Parallelisms of Artificial Neural Inherent NetworksDocumento15 páginasA Systolic Array Exploiting The Parallelisms of Artificial Neural Inherent NetworksctorreshhAinda não há avaliações
- Neural Networks: MATLABDocumento91 páginasNeural Networks: MATLABlaerciomosAinda não há avaliações
- C 2008 Applications of ANN in Coastal Engineering - An OverviewDocumento7 páginasC 2008 Applications of ANN in Coastal Engineering - An OverviewSanjay Govind PatilAinda não há avaliações
- Artificial Neural Networkon ElectricalDocumento21 páginasArtificial Neural Networkon ElectricalSwaroop Kumar NallagalvaAinda não há avaliações
- Charotar University of Science and Technology Faculty of Technology and EngineeringDocumento10 páginasCharotar University of Science and Technology Faculty of Technology and EngineeringSmruthi SuvarnaAinda não há avaliações
- Training Neural Networks With GA Hybrid AlgorithmsDocumento12 páginasTraining Neural Networks With GA Hybrid Algorithmsjkl316Ainda não há avaliações
- Unit II Supervised IIDocumento16 páginasUnit II Supervised IIindiraAinda não há avaliações
- Distance Transmission Line Protection Based On Radial Basis Function Neural NetworkDocumento4 páginasDistance Transmission Line Protection Based On Radial Basis Function Neural Networknauman_sadiq_1Ainda não há avaliações
- CC511 Week 5 - 6 - NN - BPDocumento62 páginasCC511 Week 5 - 6 - NN - BPmohamed sherifAinda não há avaliações
- Artificial Neural NetworkDocumento20 páginasArtificial Neural NetworkSibabrata Choudhury100% (2)
- Neural CryptographyDocumento17 páginasNeural CryptographySayantan MitraAinda não há avaliações
- Pattern Classification of Back-Propagation Algorithm Using Exclusive Connecting NetworkDocumento5 páginasPattern Classification of Back-Propagation Algorithm Using Exclusive Connecting NetworkEkin RafiaiAinda não há avaliações
- ECSE484 Intro v2Documento67 páginasECSE484 Intro v2Zaid SulaimanAinda não há avaliações
- Soft Computing-Lab FileDocumento40 páginasSoft Computing-Lab FileAaaAinda não há avaliações
- IBM SPSS Modeler-Neural NetworksDocumento18 páginasIBM SPSS Modeler-Neural NetworksJennifer Parker100% (1)
- Artificial Neural Networks in Bi: Information System Dept ITS Surabaya 2009Documento42 páginasArtificial Neural Networks in Bi: Information System Dept ITS Surabaya 2009Mochammad Adji FirmansyahAinda não há avaliações
- ML W5 Pla NNDocumento37 páginasML W5 Pla NNBùi Trọng HiếuAinda não há avaliações
- Why Artificial Neural Networks?: Experiment 1 AIM: To Study The Basic Concept of Artificial Neural NetworkDocumento32 páginasWhy Artificial Neural Networks?: Experiment 1 AIM: To Study The Basic Concept of Artificial Neural NetworkmanjeetAinda não há avaliações
- Neural Networks Backpropagation Algorithm: COMP4302/COMP5322, Lecture 4, 5Documento11 páginasNeural Networks Backpropagation Algorithm: COMP4302/COMP5322, Lecture 4, 5Martin GarciaAinda não há avaliações
- ATC-Alat Berat Part 4Documento18 páginasATC-Alat Berat Part 4KABINET JALADARA NABDAAinda não há avaliações
- Bai 1 EngDocumento10 páginasBai 1 EngHanh Hong LEAinda não há avaliações
- NN Module SGDocumento34 páginasNN Module SGtuazizedelamiAinda não há avaliações
- Ann8 6s PDFDocumento7 páginasAnn8 6s PDFRachit ChaudharyAinda não há avaliações
- A Brief Review of D-Forward Neural NetworksDocumento8 páginasA Brief Review of D-Forward Neural NetworksDana AbkhAinda não há avaliações
- Experiment No. 6 TE SL-II (ANN)Documento2 páginasExperiment No. 6 TE SL-II (ANN)RutujaAinda não há avaliações
- Introduction To ANNsDocumento31 páginasIntroduction To ANNsanjoomAinda não há avaliações
- DL Question Bank AnswersDocumento55 páginasDL Question Bank AnswersAnkit MahapatraAinda não há avaliações
- I61 F 107 SalaDocumento9 páginasI61 F 107 SalarusAinda não há avaliações
- Handwritten Character Recognition Using Neural NetworkDocumento6 páginasHandwritten Character Recognition Using Neural NetworkSorin MoldoAinda não há avaliações
- Signal Processing Via NNDocumento17 páginasSignal Processing Via NNRomil PatelAinda não há avaliações
- CNN and Gan: Introduction ToDocumento58 páginasCNN and Gan: Introduction ToGopiNath VelivelaAinda não há avaliações
- Aspects of The Numerical Analysis of Neural NetworksDocumento58 páginasAspects of The Numerical Analysis of Neural Networks은지Ainda não há avaliações
- Components of Artificial Neural NetworksDocumento27 páginasComponents of Artificial Neural NetworksEmy MuhamedAinda não há avaliações
- Artificial Neural NetworksDocumento34 páginasArtificial Neural NetworksAYESHA SHAZAinda não há avaliações
- AITools Unit-4Documento25 páginasAITools Unit-4SivaAinda não há avaliações
- Ann4-3s.pdf 7oct PDFDocumento21 páginasAnn4-3s.pdf 7oct PDFveenaAinda não há avaliações
- Basic Tutorials On XAS Data Analysis Using y G Athena & ArtemisDocumento31 páginasBasic Tutorials On XAS Data Analysis Using y G Athena & ArtemisAditya DharanipragadaAinda não há avaliações
- 19 - Introduction To Neural NetworksDocumento7 páginas19 - Introduction To Neural NetworksRugalAinda não há avaliações
- A Brief Review of Feed-Forward Neural NetworksDocumento8 páginasA Brief Review of Feed-Forward Neural NetworksYitayew TegodAinda não há avaliações
- Networks of Artificial Neurons Single Layer PerceptronsDocumento16 páginasNetworks of Artificial Neurons Single Layer PerceptronsSurenderMalanAinda não há avaliações
- Competitive Learning: Fundamentals and Applications for Reinforcement Learning through CompetitionNo EverandCompetitive Learning: Fundamentals and Applications for Reinforcement Learning through CompetitionAinda não há avaliações
- Analog Electronics: Circuits, Systems and Signal ProcessingNo EverandAnalog Electronics: Circuits, Systems and Signal ProcessingAinda não há avaliações
- Statement of The ProblemDocumento27 páginasStatement of The ProblemMjGutierrezAinda não há avaliações
- Numpy - 1.9.2+mkl - cp27 - None - Win - Amd64.whlDocumento2 páginasNumpy - 1.9.2+mkl - cp27 - None - Win - Amd64.whlMjGutierrezAinda não há avaliações
- PCB Wizard - Professional Edition - PCB Seguidor de LineaDocumento1 páginaPCB Wizard - Professional Edition - PCB Seguidor de LineaMjGutierrezAinda não há avaliações
- Baby Orangutan B PinsDocumento1 páginaBaby Orangutan B PinsMjGutierrezAinda não há avaliações
- Quirino State University: Republic of The Philippines Diffun, QuirinoDocumento8 páginasQuirino State University: Republic of The Philippines Diffun, QuirinoCharlie MerialesAinda não há avaliações
- Teaching Kids Lesson Plan SpaceDocumento3 páginasTeaching Kids Lesson Plan SpaceBet MetAinda não há avaliações
- Yield Stress Sa 240 304Documento1 páginaYield Stress Sa 240 304faizalAinda não há avaliações
- Born: Died:: 26 April 1920 in Kumbakonam, Tamil Nadu State, IndiaDocumento7 páginasBorn: Died:: 26 April 1920 in Kumbakonam, Tamil Nadu State, IndiaAtul Singh ChauhanAinda não há avaliações
- Areas of Normal CurveDocumento24 páginasAreas of Normal CurveJoyzmarv Aquino100% (1)
- Aa-Matrix Company ProfileDocumento23 páginasAa-Matrix Company ProfileBilly Joe BreakfastAinda não há avaliações
- Thesis Topics For Electrical TechnologyDocumento4 páginasThesis Topics For Electrical TechnologyFinishedCustomWritingPaperSingapore100% (2)
- Reading and Writing Q1 - M13Documento13 páginasReading and Writing Q1 - M13Joshua Lander Soquita Cadayona100% (1)
- Oracle Database 11g - SQL Fundamentals I - Oracle Certification ExamDocumento2 páginasOracle Database 11g - SQL Fundamentals I - Oracle Certification ExamRohit Joshi100% (1)
- TrendsDocumento3 páginasTrendsT S Troop BuddiesAinda não há avaliações
- MAED Lecture01 11Documento11 páginasMAED Lecture01 11chrisslyn antonioAinda não há avaliações
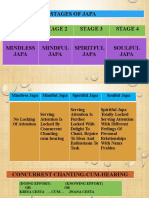
- SOULFUL JAPA - Bliss Unlimited by Japa YagnaDocumento28 páginasSOULFUL JAPA - Bliss Unlimited by Japa Yagnabalaganesh spk100% (1)
- Course Outline Pre-Calc Math 12Documento2 páginasCourse Outline Pre-Calc Math 12api-709173349Ainda não há avaliações
- Trainee'S Record Book: Muñoz National High SchoolDocumento8 páginasTrainee'S Record Book: Muñoz National High SchoolGarwin Rarama OcampoAinda não há avaliações
- Rubrics For Speaking CompetenceDocumento1 páginaRubrics For Speaking CompetenceAMELYN DACULAAinda não há avaliações
- Single Sex EducationDocumento7 páginasSingle Sex EducationBreAnna SmithAinda não há avaliações
- Regular ResumeDocumento3 páginasRegular Resumeapi-275908631Ainda não há avaliações
- Classification Epidemiological Studies PDFDocumento17 páginasClassification Epidemiological Studies PDFAnonymous goIn6wA3KAinda não há avaliações
- Literature Review of Pick and Place RobotDocumento4 páginasLiterature Review of Pick and Place Robotgvzf446w100% (1)
- Ge09 Memory Test #9 Mojica, Adrienne B.Documento4 páginasGe09 Memory Test #9 Mojica, Adrienne B.Adrienne Dave Mojica100% (1)
- 5e Lesson PlanDocumento2 páginas5e Lesson Planapi-724497757Ainda não há avaliações
- Permit To StudyDocumento5 páginasPermit To StudyMichael Vallejos Magallanes ZacariasAinda não há avaliações
- The Writing Block: Cheryl M. SigmonDocumento4 páginasThe Writing Block: Cheryl M. Sigmoneva.bensonAinda não há avaliações
- Difference of Broken Family To The Academic PerformanceDocumento8 páginasDifference of Broken Family To The Academic PerformanceJoselito Leoncio Jr.Ainda não há avaliações
- Duolingo Speaking Presentation For 1-3 MinutesDocumento1 páginaDuolingo Speaking Presentation For 1-3 Minutesvalvinimesh5732Ainda não há avaliações
- Orientation Guide - 12 Week YearDocumento4 páginasOrientation Guide - 12 Week YearSachin Manjalekar89% (9)
- Program Evaluation RubricDocumento13 páginasProgram Evaluation RubricShea HurstAinda não há avaliações
- RIGER - Epistemological Debates, Feminist VoicesDocumento24 páginasRIGER - Epistemological Debates, Feminist VoicesAimé LescanoAinda não há avaliações
- IB Business IA Step-by-Step GuideDocumento15 páginasIB Business IA Step-by-Step GuideTalal M. HashemAinda não há avaliações