Você também pode gostar
- Radio Remote-Control and Telemetry and Their Application to MissilesNo EverandRadio Remote-Control and Telemetry and Their Application to MissilesNota: 4 de 5 estrelas4/5 (1)
- Mobile WiMAX: A Systems Approach to Understanding IEEE 802.16m Radio Access TechnologyNo EverandMobile WiMAX: A Systems Approach to Understanding IEEE 802.16m Radio Access TechnologyAinda não há avaliações
- WDM Technologies: Passive Optical ComponentsNo EverandWDM Technologies: Passive Optical ComponentsAchyut K. DuttaAinda não há avaliações
- Mobile Train Radio Communication PPT SlideshareDocumento28 páginasMobile Train Radio Communication PPT SlideshareSuchith RajAinda não há avaliações
- Microwave Filters for Communication Systems: Fundamentals, Design, and ApplicationsNo EverandMicrowave Filters for Communication Systems: Fundamentals, Design, and ApplicationsAinda não há avaliações
- A UAV Detection Algorithm Based On An Artificial Neural NetworkDocumento9 páginasA UAV Detection Algorithm Based On An Artificial Neural NetworkanjulAinda não há avaliações
- HUAWEI BSC6000 V900R008 General Introduction: 2008-05 Security Level: Internal UseDocumento32 páginasHUAWEI BSC6000 V900R008 General Introduction: 2008-05 Security Level: Internal UseroobowAinda não há avaliações
- Principles of Radio CommunicationsDocumento7 páginasPrinciples of Radio CommunicationsRăzvan HerțegAinda não há avaliações
- PAPR Reduction of OFDM Signals Using Selected Mapping TechniqueDocumento67 páginasPAPR Reduction of OFDM Signals Using Selected Mapping TechniqueKsrinivas RaoAinda não há avaliações
- Wireless Sensor Network Simulators A Survey and Comparisons: Harsh SundaniDocumento17 páginasWireless Sensor Network Simulators A Survey and Comparisons: Harsh Sundanisafdar-abbasAinda não há avaliações
- Cellular CommunicationDocumento69 páginasCellular CommunicationFanuel MsekelaAinda não há avaliações
- OneWeb's Non-Geostationary Satellite System Technical OverviewDocumento87 páginasOneWeb's Non-Geostationary Satellite System Technical OverviewdchardwareAinda não há avaliações
- AISG RET Standard AISG vRET3 1 2 1Documento28 páginasAISG RET Standard AISG vRET3 1 2 1Haris HidayatullohAinda não há avaliações
- Understanding UMTS Radio Network Modelling, Planning and Automated Optimisation: Theory and PracticeNo EverandUnderstanding UMTS Radio Network Modelling, Planning and Automated Optimisation: Theory and PracticeMaciej NawrockiAinda não há avaliações
- OfdmDocumento2 páginasOfdmArunkumar100% (2)
- Mobile Computing: Cellular NetworkDocumento18 páginasMobile Computing: Cellular NetworkArun KumarAinda não há avaliações
- Satellite Link Budget AnalysisDocumento61 páginasSatellite Link Budget AnalysismzheliaAinda não há avaliações
- A Review of Various Routing Protocols in VANETDocumento4 páginasA Review of Various Routing Protocols in VANETIJAERS JOURNALAinda não há avaliações
- OFDM LectureDocumento128 páginasOFDM Lectureashugolu02Ainda não há avaliações
- OFDMADocumento55 páginasOFDMAamelalic75% (4)
- The Mobile Broadband Standard: LTE OverviewDocumento4 páginasThe Mobile Broadband Standard: LTE OverviewradioAinda não há avaliações
- TDMADocumento5 páginasTDMAsharonfranklinAinda não há avaliações
- Implementation of A Complete GPS Receiver Using SimulinkDocumento9 páginasImplementation of A Complete GPS Receiver Using SimulinkvwnunlaiAinda não há avaliações
- BG 1Documento1 páginaBG 1bruck bogaleAinda não há avaliações
- 5G - IMT2020-presentation-Marco-Carugi-final-reduced PDFDocumento26 páginas5G - IMT2020-presentation-Marco-Carugi-final-reduced PDFKotesh ChunduAinda não há avaliações
- Ns 3 Workshop Part1Documento38 páginasNs 3 Workshop Part1Jio Hendro100% (1)
- Cellular Communication (Jaga (Edited) )Documento25 páginasCellular Communication (Jaga (Edited) )RajKiran100% (1)
- Introduction To NGN SlidesDocumento15 páginasIntroduction To NGN SlidesMuhammad Laily Nur Syarif100% (1)
- Mobile Terminal Receiver Design: LTE and LTE-AdvancedNo EverandMobile Terminal Receiver Design: LTE and LTE-AdvancedAinda não há avaliações
- Tdma 2Documento28 páginasTdma 2jenath1Ainda não há avaliações
- Interpolation in Digital Modems. I. FundamentalsDocumento7 páginasInterpolation in Digital Modems. I. FundamentalsNéstor O. Bayona A.Ainda não há avaliações
- ORAN-WG4 IOT 0-v01 00 PDFDocumento70 páginasORAN-WG4 IOT 0-v01 00 PDFelectrico servicesAinda não há avaliações
- Understanding Satellite Broadband Quality of Experience Final ReportDocumento166 páginasUnderstanding Satellite Broadband Quality of Experience Final ReportPatrick GelardAinda não há avaliações
- THz Channel Modeling ReviewDocumento17 páginasTHz Channel Modeling ReviewKyerohtaronAinda não há avaliações
- Earth Station by AsjadDocumento28 páginasEarth Station by AsjadPawan KumarAinda não há avaliações
- Advantages of TETRADocumento11 páginasAdvantages of TETRAtetraprimigAinda não há avaliações
- Analysis of The Effect of Impulse Noise On Multicarrier and Single Carrier QAM Systems 502Documento3 páginasAnalysis of The Effect of Impulse Noise On Multicarrier and Single Carrier QAM Systems 502Salman Wajib KhanAinda não há avaliações
- The LabVIEW Simulation of Space-Time Coding Technique in The MIMO-OfDM SystemDocumento6 páginasThe LabVIEW Simulation of Space-Time Coding Technique in The MIMO-OfDM Systemivy_publisherAinda não há avaliações
- Communication Radar Systems Design and SimulationDocumento89 páginasCommunication Radar Systems Design and SimulationAbdulrahman BastaAinda não há avaliações
- Wireless Technology (Includes Practicals)Documento2 páginasWireless Technology (Includes Practicals)Dreamtech Press0% (1)
- JetWave Antenna KaBandDocumento3 páginasJetWave Antenna KaBandsailee_gharatAinda não há avaliações
- Agilent WCDMA TutorialDocumento64 páginasAgilent WCDMA TutorialRavi SVAinda não há avaliações
- Issi White Paper - FinalDocumento20 páginasIssi White Paper - FinalepidavriosAinda não há avaliações
- ASTRIX ProductDocumento2 páginasASTRIX ProductLe ProfessionistAinda não há avaliações
- ICS Telecom LeafletDocumento2 páginasICS Telecom LeafletMelania Dîmbeanu100% (1)
- Stewart Weiss - Unix Lecture Notes (2020, Hunter College)Documento536 páginasStewart Weiss - Unix Lecture Notes (2020, Hunter College)Gulrez MAinda não há avaliações
- OFDMDocumento12 páginasOFDMNizashivaAinda não há avaliações
- 1X3 Frequency Reuse Technology Guideline (v2.0)Documento24 páginas1X3 Frequency Reuse Technology Guideline (v2.0)Rotimi OlajitanAinda não há avaliações
- U-Net Planning ToolDocumento39 páginasU-Net Planning Toolruqmus100% (2)
- 2002 07 GSM Voice CapacityDocumento19 páginas2002 07 GSM Voice CapacitycoolAinda não há avaliações
- Why Ofdm - What Does It Mean by Orthogonal Frequency Division Multiplexing?Documento3 páginasWhy Ofdm - What Does It Mean by Orthogonal Frequency Division Multiplexing?Ankur Agarwal100% (1)
- Different Types of Wireless Communication With ApplicationsDocumento7 páginasDifferent Types of Wireless Communication With Applicationskattaswamy100% (2)
- Wavelength Division MultiplexingDocumento7 páginasWavelength Division MultiplexingJorge RzezakAinda não há avaliações
- Mini Project of Paper BatteryDocumento22 páginasMini Project of Paper BatteryvamsiAinda não há avaliações
- Wifi Offload CiscoDocumento70 páginasWifi Offload Ciscorachid190274Ainda não há avaliações
- EWS Design Guidelines For PCB Manufacture May 2012Documento5 páginasEWS Design Guidelines For PCB Manufacture May 2012wandai_81Ainda não há avaliações
- Mjerenje Brzine I MomentaDocumento15 páginasMjerenje Brzine I MomentaSenad SmakaAinda não há avaliações
- Nandipur 425MW CCPP FF & HVAC System Operation Manual (Volume I Part 6) FDocumento67 páginasNandipur 425MW CCPP FF & HVAC System Operation Manual (Volume I Part 6) FHassan FarazAinda não há avaliações
- MajorDocumento13 páginasMajordulipala alekya gupthaAinda não há avaliações
- Installation Instructions for M210E-CZ Conventional Zone Interface ModuleDocumento4 páginasInstallation Instructions for M210E-CZ Conventional Zone Interface ModuleProstě ZanekAinda não há avaliações
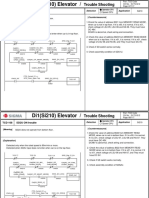
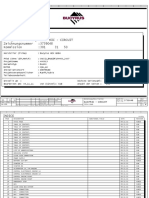
- TCD 114 RPD ON trouble detection and countermeasuresDocumento7 páginasTCD 114 RPD ON trouble detection and countermeasuresFERNSAinda não há avaliações
- Lab Report Kirchhoffs Voltage and Current Laws KVL and KCLDocumento2 páginasLab Report Kirchhoffs Voltage and Current Laws KVL and KCLAvishek Chowdhury0% (1)
- AC GENERATOR PROJECT REPORTDocumento21 páginasAC GENERATOR PROJECT REPORTCHALLENGER'S PHYSICS CLASSESAinda não há avaliações
- Forbidden LatenciesDocumento7 páginasForbidden LatenciesAr VindAinda não há avaliações
- Elektric Schematic - RH 400 400013Documento290 páginasElektric Schematic - RH 400 400013Vikranth ReddyAinda não há avaliações
- Low Voltage Distribution BoardDocumento39 páginasLow Voltage Distribution BoardJoshua WeeAinda não há avaliações
- PL3 PL4 Output Connection - v1.2Documento5 páginasPL3 PL4 Output Connection - v1.2Victor GarciaAinda não há avaliações
- 0000518A Circuit Breaker PaperDocumento5 páginas0000518A Circuit Breaker PaperRicardo HerreraAinda não há avaliações
- 9600-3003-2 C Premier Industrial Manual A4Documento8 páginas9600-3003-2 C Premier Industrial Manual A4BijuAinda não há avaliações
- Swyd NewDocumento39 páginasSwyd NewMrityunjayChauhanAinda não há avaliações
- E+H Menu Docs IOMs Analysis Turbidity BA200CEN Liquisys M Cum 223 253 OMDocumento96 páginasE+H Menu Docs IOMs Analysis Turbidity BA200CEN Liquisys M Cum 223 253 OMSuraj PillaiAinda não há avaliações
- Braking ReferenceDocumento38 páginasBraking ReferenceNavid HassanabadyAinda não há avaliações
- Ansys Icepak BrochureDocumento4 páginasAnsys Icepak Brochurejagadees21Ainda não há avaliações
- Power Amplifier: Service ManualDocumento20 páginasPower Amplifier: Service ManualLeonardo MarraffiniAinda não há avaliações
- 2G CMDDocumento3 páginas2G CMDأبوعمر الفاروق عبدالرحمنAinda não há avaliações
- M.E. Electronics and Communication Engineering (Industry Integrated) BranchDocumento49 páginasM.E. Electronics and Communication Engineering (Industry Integrated) BranchRagland CAinda não há avaliações
- Ecler EWAMPBT en User ManualDocumento11 páginasEcler EWAMPBT en User ManualMatei DumitruAinda não há avaliações
- Datasheet PDFDocumento1 páginaDatasheet PDFSunHerryAinda não há avaliações
- Eng TKR-304E ManualDocumento36 páginasEng TKR-304E ManualJean TevesAinda não há avaliações
- Advance Electrical MachinesDocumento14 páginasAdvance Electrical MachinesSammar AbbasAinda não há avaliações
- Multimedia: Content Content FormsDocumento5 páginasMultimedia: Content Content FormsBoobalan RAinda não há avaliações
- Sony Hcd-gnz77d Gnz88d Ver-1.3 SCHDocumento6 páginasSony Hcd-gnz77d Gnz88d Ver-1.3 SCHShailesh SanayeAinda não há avaliações
- Making The Perfect Connection: Protectron Electromech Pvt. LTDDocumento33 páginasMaking The Perfect Connection: Protectron Electromech Pvt. LTDlingubhAinda não há avaliações