
Escolar Documentos
Profissional Documentos
Cultura Documentos
A Copos Error
Enviado por
Alexandr TimofeevDireitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
A Copos Error
Enviado por
Alexandr TimofeevDireitos autorais:
Formatos disponíveis
ACOPOS Error Texts
Pagina 1 di 164
ACOPOS Error Texts
The ACOPOS error texts are described as follows:
<error number>: <error text>
Info:
Description of the additional information output with the error
message.
Data type: Data format
Description:
Exact description of error.
Reaction:
Description of the reaction of the ACOPOS servo drive, which is triggered by the
error.
Cause/Remedy:
Description of the cause of error as well as the possibilities for correcting this
error.
1: Invalid parameter ID
Info:
Data type:
Description:
Response error while writing or reading an invalid parameter ID.
Reaction:
None.
Cause/Remedy:
See error number 1002.
2: Data block for upload is not available
Info:
Data type:
Description:
Response error during initialization of an NC system module data block upload (data block read access).
The corresponding NC system module ('acp10sys.br' or 'acp10bsl.br') is not present on the drive.
Reaction:
Data block read access is not initialized.
Cause/Remedy:
The NC system module was not saved on the drive.
See error number 32018.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 2 di 164
3: Write access for a read-only parameter
Info:
Data type:
Description:
Response error while writing a parameter, which does not allow a change in the value.
Reaction:
The parameter value is not accepted.
Cause/Remedy:
See error number 1002.
4: Read access for a write-only parameter
Info:
Data type:
Description:
Response error while reading a parameter, which does not allow read access.
Reaction:
The parameter value is not passed on.
Cause/Remedy:
See error number 1002.
8: Data block read access already initialized
Info:
Data type:
Description:
Response error during initialization of a data block read access (upload), if the previous transfer has not yet
been completed.
Reaction:
Data block read access is not initialized for the parameter ID.
Cause/Remedy:
Sequence error during data block download.
See also error number 1002.
9: Data block write access already initialized
Info:
Data type:
Description:
Response error during initialization of a data block write access (download), if the previous transfer has not
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 3 di 164
yet been completed.
Reaction:
Data block write access is not initialized for the parameter ID.
Cause/Remedy:
Sequence error during data block download.
See also error number 1002.
10: Data block read access not initialized
Info:
Data type:
Description:
Response error while reading a data segment (RD_BLOCK_SEGM, RD_BLOCK_LAST_SEGM), if no data
block upload was initialized.
Reaction:
No data is passed on.
Cause/Remedy:
See error number 8.
11: Data block write access not initialized
Info:
Data type:
Description:
Response error while writing a data segment (WR_BLOCK_SEGM, WR_BLOCK_LAST_SEGM), if no data
block download was initialized.
Reaction:
No data is saved.
Cause/Remedy:
See error number 9.
16: The data segment is already the last when reading the data block
Info:
Data type:
Description:
Response error while reading a data segment (RD_BLOCK_SEGM), if the initialized length of the upload
data has already been transferred. The last data segment must be transferred with its own parameter ID
(RD_BLOCK_LAST_SEGM).
Reaction:
The data block upload is aborted.
Cause/Remedy:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 4 di 164
See error number 8.
17: The data segment is already the last when writing the data block
Info:
Data type:
Description:
Response error while writing a data segment (RD_BLOCK_SEGM), if the initialized length of the download
data has already been transferred. The last data segment must be transferred with its own parameter ID
(WR_BLOCK_LAST_SEGM).
Reaction:
The data block download is aborted. No data is saved.
Cause/Remedy:
See error number 9.
18: The data segment is not yet the last when reading the data block
Info:
Data type:
Description:
Response error while reading the last data segment (RD_BLOCK_LAST_SEGM), if enough upload data has
not yet been transferred for the initialized length.
Reaction:
The data block upload is aborted.
Cause/Remedy:
See error number 8.
19: The data segment is not yet the last when writing the data block
Info:
Data type:
Description:
Response error while writing the last data segment (WR_BLOCK_LAST_SEGM), if enough download data
has not yet been transferred for the initialized length.
Reaction:
The data block download is aborted. No data is saved.
Cause/Remedy:
See error number 9.
21: Checksum after data block write is invalid
Info:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 5 di 164
Data type:
Description:
Response error in BsLoader mode during the data block download of an NC system module ('acp10sys.br'
or 'acp10bsl.br'). The checksum of the NC system module (B&R module) is invalid.
Reaction:
See error number 25.
Cause/Remedy:
See error number 32018.
See error number 1012.
23: Parameter ID in data block is invalid (data block write)
Info:
Parameter ID
Data type:
'PARID'
Description:
Response error in BsLoader mode during the data block download of an NC system module ('acp10sys.br'
or 'acp10bsl.br'). The parameter ID of the data block does not match the parameter ID entered to the B&R
module header of the transferred NC system module.
Reaction:
See error number 25.
Cause/Remedy:
The transferred data block is an invalid NC system module.
A BsLoader ('acp10bsl.br') was transferred during the operating system download.
An operating system ('acp10sys.br') was transferred during the BsLoader download.
See error number 32018.
25: Burn system module only allowed immediately after download
Info:
Data type:
Description:
Response error in BsLoader mode during the 'burn NC system module' command. There is no valid NC
system module ('acp10sys.br' or 'acp10bsl.br') present on the drive or the burn command was not
executed immediately following the NC system module download.
Reaction:
NC system module is identified as invalid and cannot be saved (burned to the FLASH memory).
Cause/Remedy:
NC system module download was not executed.
NC system module is malfunctioning, is invalid or is incompatible.
Sequence error during NC system module download.
See also error number 32018.
27: Operating system not able to be started (operating system is not on the
FPROM)
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 6 di 164
Info:
Data type:
Description:
Response error during command for changing the boot state, 'start operating system'. There is no
operating system saved on the drive.
Reaction:
The operating system is not started.
Cause/Remedy:
See error number 32018.
40: Value of parameter higher than maximum value
Info:
Maximum value
Data type:
REAL
Description:
Response error while writing a parameter, if the value is larger than the upper limit for this parameter.
Reaction:
The parameter value is not accepted.
Cause/Remedy:
See error number 1002.
41: Value of parameter higher than maximum value
Info:
Maximum value
Data type:
UDINT
Description:
See error number 40.
Reaction:
See error number 40.
Cause/Remedy:
See error number 40.
42: Value of parameter higher than maximum value
Info:
Maximum value
Data type:
DINT
Description:
See error number 40.
Reaction:
See error number 40.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 7 di 164
Cause/Remedy:
See error number 40.
52: Value of parameter lower than minimum value
Info:
Minimum value
Data type:
REAL
Description:
Response error while writing a parameter, if the value is smaller than the lower limit for this parameter.
Reaction:
The parameter value is not accepted.
Cause/Remedy:
See error number 1002.
53: Value of parameter lower than minimum value
Info:
Minimum value
Data type:
UDINT
Description:
See error number 52.
Reaction:
See error number 52.
Cause/Remedy:
See error number 52.
54: Value of parameter lower than minimum value
Info:
Minimum value
Data type:
DINT
Description:
See error number 52.
Reaction:
See error number 52.
Cause/Remedy:
See error number 52.
64: Hardware ID in B&R module is invalid (data block write)
Info:
Hardware ID
Data type:
USINT
Description:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 8 di 164
Response error in BsLoader mode during the download of an NC system module ('acp10sys.br' or
'acp10bsl.br'). The hardware ID in the B&R module header of the NC system module is invalid or
incompatible to the ACOPOS hardware.
Reaction:
See error number 25.
Cause/Remedy:
The NC system module cannot be supported by the ACOPOS hardware.
See error number 32018.
65: Hardware version in B&R module is invalid (data block write)
Info:
Hardware Revision
Data type:
USINT
Description:
Response error in BsLoader mode during the download of an NC system module ('acp10sys.br' or
'acp10bsl.br'). The hardware version in the B&R module header of the NC system module is not compatible
with the hardware version of the drive.
Reaction:
See error number 25.
Cause/Remedy:
Incorrect operating system version or BsLoader version:
BsLoader V047 or operating system V110 is not allowed to be loaded on an ACOPOS servo drive
8Vxxxx.00-1.
BsLoader V0381 or operating system V0390 is not allowed to be loaded on an ACOPOS servo drive
8Vxxxx.xx-2.
See error number 32018.
66: The operating system on the drive is incompatible to the existing network
Info:
Hardware ID of operating system
Data type:
USINT
Description:
Response error in BsLoader mode during the 'change boot state' command. The operating system cannot
be started because the saved operating system does not support the existing network.
Hardware ID of operating system:
80h...CAN operating system
81h...Powerlink operating system
Reaction:
The command is not executed.
Cause/Remedy:
A Powerlink operating system is saved on a drive with a CAN network card (AC110 plug-in card).
A CAN operating system is saved on a drive with a Powerlink network card (AC112 plug-in card).
See error number 32018.
67: Necessary parameter is missing or is invalid
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Info:
Parameter ID
Data type:
'PARID'
Pagina 9 di 164
Description:
Response error while writing the parameter. A parameter, which is necessary for the assignment, was not
configured or was configured incorrectly
Reaction:
Parameter value is not accepted.
Cause/Remedy:
Parameters were configured in wrong order.
Dependent parameters are missing or were before invalidly configured.
Example: If when switching on the external bleeder not all parameters of the external bleeder were valid
configured, then this error is sent.
68: Data block length invalid
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
1001: Error-FIFO overflow
Info:
Data type:
Description:
The FIFO for error messages on the ACOPOS is full. Only runtime errors are entered in this error FIFO.
Response errors are directly sent as response to parameter write or read.
Reaction:
Further error messages are lost.
Cause/Remedy:
Via the network;
- no errors are being read or
- errors are being read too slowly.
On the ACOPOS;
- too many errors are being entered or
- errors are being entered too quickly.
See additionally entered error numbers.
1002: Parameter outside the valid range
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 10 di 164
Info:
Data type:
Description:
Response error while writing a parameter if the value is outside the valid limits.
Reaction:
The parameter value is not accepted.
Cause/Remedy:
Incorrect parameter ID being used for the desired function.
The value is not a valid constant or is not in the allowed selection list.
The value exceeds or does not meet the limits for implementation.
The value is outside of a physically possible range (e.g. negative time).
The data type or data length for this parameter ID is incorrect.
Network transfer error. See also error number 1012.
1003: Parameter cannot be written while loop control is active
Info:
Data type:
Description:
Response error while writing a parameter, which does not allow a change in the value when the controller
is active.
Reaction:
The parameter value is not accepted.
Cause/Remedy:
The parameter was written too late (after the 'switch on controller' command).
The 'switch off controller' command is missing or was not executed in the drive state (movement active).
Request (delay step) for 'controller off' state is missing.
-> Check program sequence and status request.
1004: Timeout in network life sign monitor
Info:
Data type:
Description:
Runtime error during active network life sign monitoring, if no cyclic telegram arrives for a specified
amount of time (NETWORK_LIVE_CTRL).
See also error number 4005.
Reaction:
All digital outputs (AC130, AC131) are deactivated, (i.e. the output levels are set to LOW and all switchable
IOs are set to input).
When 'switch on controller' command: See error number 4005.
When controller is active: See error number 1011.
Cause/Remedy:
Problem in network life sign monitor:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 11 di 164
Time for network life sign monitoring NETWORK_LIVE_CTRL is defined too short.
Network life sign monitoring is activated too early, before cyclic telegrams are sent.
Problem in network data transfer:
Cycle time exceeded, extremely high computing time load or failure of the controller CPU.
Disturbance or disconnection of the network connection. See wiring guidelines error number 7030.
The network load is too high.
1005: Parameter cannot be written while a movement is active
Info:
Data type:
Description:
Response error while writing a parameter, which does not allow a change in the value when a movement is
active.
Reaction:
The parameter value is not accepted.
Cause/Remedy:
The parameter was written too late, after a movement start command.
Request (delay step) for 'move complete' state is missing.
-> Check program sequence and status request.
1006: Invalid parameter for trigger event (digital input + edge)
Info:
Data type:
Description:
Response error while writing an event parameter if the value is an invalid digital input or an invalid trigger
edge.
Reaction:
The parameter value is not accepted.
Cause/Remedy:
See error number 1002.
1007: Master for network coupling deactivated - one master is already sending
Info:
Data type:
Description:
Runtime error when sending cyclic master data (positions) for a network coupling if data is also received at
the same CAN ID (MA1/2/3_CYCLIC_SEND).
Reaction:
The transmission of data is deactivated for this coupling object, to prevent a CAN-BUS-OFF or position
jumps.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 12 di 164
Cause/Remedy:
The transmission of data to this coupling object was also activated for another master (network nodes).
Another device is sending telegrams to the CAN-IDs of the ACOPOS network coupling (125, 126, 127).
1008: Master for network coupling deactivated - Encoder error
Info:
Data type:
Description:
Runtime error when sending cyclic master data for a network coupling if actual positions are sent and the
corresponding encoder sends an error (MA1/2/3_CYCLIC_SEND).
Reaction:
The transmission of data is deactivated for this coupling object, to prevent position jumps.
Cause/Remedy:
See additionally entered encoder error numbers.
1009: Error during memory allocation
Info:
Data type:
Description:
Response error in dynamic memory management if there is not enough memory for the requested function.
Reaction:
The most recently requested function is not executed.
The download data is not saved.
The parameter value is not accepted.
Cause/Remedy:
An individual memory area is too large or too much memory was being used:
cam profile data download,
parameter sequence download,
EPROM data download,
creation of function block (FUNCTION_BLOCK_CREATE),
when writing parameters with memory allocation (CAMCON_MAX_CAM, FIFO_MAX_LENGTH)
1011: Quickstop input active
Info:
Data type:
Description:
Runtime error in quickstop function if the configured digital input is active.
See also error number 4005.
Reaction:
The 'controller ready' state is reset.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 13 di 164
When 'switch on controller' command: See error number 4005.
When position control is active (CONTROLLER_MODE=1 or 3):
Movement stopped with the axis limits and by switching off the controller.
When speed control is active (CONTROLLER_MODE=2): See error number 4007.
When U/f control is active (CONTROLLER_MODE=7):
Movement stopped with speed controlled ramp, with axis limits and by switching off the controller.
When current control is active with commutation (CONTROLLER_MODE=4):
Movement stopped with the current limits and by switching off the controller.
Cause/Remedy:
See error number 6021.
1012: Breakdown of cyclic network communication
Info:
Data type:
Description:
Runtime error if the Firmware for the AC112 network card detects a failure in the cyclic Powerlink
communication.
See error number 4005.
Reaction:
See error number 1004.
Cause/Remedy:
Network cabling interruption.
Powerlink station has failed or is switched off.
Too many stations wired together (maximum number of HUB layers, maximum network cable length).
Too many stations for the configured Powerlink cycle time.
Environmental temperature outside the valid range.
Network plug-in card (AC112) is defective or wrong HW revision.
In the event of network disturbances: See wiring guidelines error number 7030
1013: Station is not available for network communication
Info:
Station number
Data type:
UINT
Description:
Error configuring cyclic receive data if the network station for a coupling is not available
(CONFIG_MA1/2/3/4/5_CYCLIC_POS).
Reaction:
The cyclic data (position) is not available on the corresponding parameter ID (MA1/2/3/4/5_CYCLIC_POS)
and is not updated.
Cause/Remedy:
Invalid station number.
The configuration was written too early.
The station is not yet on the network or has failed.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 14 di 164
See also error number 1012.
1014: Network command interface is occupied
Info:
Data type:
Description:
Error configuring cyclic receive data if the processing of the last command is not finished yet
(CONFIG_MA1/2/3/4/5_CYCLIC_POS).
Reaction:
The configuration of the network coupling is not accepted.
Cause/Remedy:
The configuration for this coupling object was written sveral times too fast one after the other.
1016: Maximum cycle time exceeded - CPU load too high
Info:
Data type:
Description:
Runtime error while processing the mid-priority operating system functions if the computing time load on
the ACOPOS is too high (e.g. set value generation, network processing and function blocks are no longer
completed with the position controller cycle of 400us). The high priority controller functions are further
processed with a rigid cycle.
Reaction:
Depending on the duration and the degree by which the cycle time is exceeded, subsequent errors can
occur (e.g. speed jumps and lag errors).
Cause/Remedy:
Too many function blocks (FUNCTION_BLOCK_CREATE).
1017: Invalid parameter ID for cyclic read access
Info:
Parameter ID
Data type:
'PARID'
Description:
Response error configuring a cyclic read access or a data connection using pointer parameter ID.
Reaction:
The parameter ID is not accepted.
Cause/Remedy:
Invalid parameter ID, the data type is not supported (composite data type or not a 4 byte value).
Read access not allowed or parameter with a computing-intensive read function.
1018: Invalid parameter ID for cyclic write access
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Info:
Parameter ID
Data type:
'PARID'
Pagina 15 di 164
Description:
Response error configuring a cyclic write access or a data connection using pointer parameter ID.
Reaction:
The parameter ID is not accepted.
Cause/Remedy:
Write access not allowed. Write access not allowed when controller is active or when a movement is active.
See also error number 1017.
1021: Parameter cannot be written: Function block active
Info:
Data type:
Description:
Response error while writing a parameter, which does not allow a change in the value when the
corresponding function block is active.
Reaction:
The parameter value is not accepted.
Cause/Remedy:
The function block does not support an 'online' change of this parameter.
The function block is active in a certain operating state, which does not allow an 'online' change of this
parameter (e.g. MPGEN in a compensation movement).
The parameter was written too late, after activation of the function block or operating state.
The function block was not deactivated before writing the parameter or a status request is missing.
2001: Upload of trace data not allowed: Recording active
Info:
Data type:
Description:
Response error during initialization of the data upload (data block read access) if a trace is still active.
Reaction:
Data block read access is not initialized. The upload cannot be executed.
Cause/Remedy:
Due to a long recording time or because the trigger event has not occurred, the previous trace has not yet
ended.
Status request for 'end trace' missing.
The 'stop trace' command is missing.
-> Check trace parameter for the trigger condition.
2003: Trace start not allowed: Recording active
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 16 di 164
Info:
Data type:
Description:
Response error using 'Start trace' command if a trace is already active.
Reaction:
This does not interrupt the active trace.
Cause/Remedy:
See error number 2001.
2004: Trace start not allowed: No trace test data defined
Info:
Data type:
Description:
Response error using 'Start trace' command if no test data has been configured for the trace.
Reaction:
The trace is not started.
Cause/Remedy:
Invalid parameter ID for test data.
2006: Initialization of trace parameters not allowed: Recording active
Info:
Data type:
Description:
Response error while writing a parameter if a trace is active. 'Online' changes cannot be made to the trace
parameter.
Reaction:
The parameter value is not accepted.
This does not interrupt the active trace.
Cause/Remedy:
The parameter was written too late, after the 'start trace' command.
See error number 2001.
4005: Controller cannot be switched on: Drive in error state
Info:
Data type:
Description:
Response error while switching on the controller if the drive is in an error state. The error LED indicates the
'controller not ready' state. Additionally, a runtime error is entered, which provides detailed information
about the cause of error. (e.g. error number 1011). This error entry can also be triggered using a separate
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 17 di 164
command (CMD_ERR_STATE_INTO_FIFO).
Reaction:
The power level is not enabled and the controller is not switched on.
Cause/Remedy:
See additionally entered error numbers.
4007: Lag error stop limit exceeded
Info:
Current lag error
Data type:
REAL
Description:
Runtime error when position controller is active if the lag error PCTRL_LAG_ERROR exceeds the configured
lag error limit value AXLIM_DS_STOP.
Reaction:
Movement stopped with speed regulated ramp, with axis limits and by switching off the controller.
Cause/Remedy:
Lag error limit too small (AXLIM_DS_STOP).
Incorrect controller configuration:
- Controller is set too weak.
- Feed forward incorrectly configured (e.g. prediction time = 0).
- Unstable control loop.
Current limiting:
- Increased current. See error number 9030.
- EMF: Operating speed too high and/or network voltage too low. Check if the motor is being run within the
voltage limit sqrt(ICTRL_USD_REF^2+ ICTRL_USQ_REF^2) > UDC_ACT/sqrt(3).
- Current limiting: Check if the current ICTRL_ISQ_REF is limited with the limits sqrt(2)*
MOTOR_CURR_MAX or sqrt(2)* ACOPOS_CURR_MAX.
- Recovery power limiter: Check if UDC_ACT > UDC_BLEEDER_ON and ICTRL_ISQ_REF = ISQ_MAX_UDC
and ICTRL_ISQ_REF = ISQ_MIN_UDC.
- Under-voltage limiter: Check if UDC_ACT < UDC_NOMINAL and ICTRL_ISQ_REF = ISQ_MAX_UDC and
ICTRL_ISQ_REF = ISQ_MIN_UDC.
- Temperature limiter: The current is limited when movement is stopped due to over-temperature on
junction. See error number 9030.
- Torque limiting: Check if the torque TORQUE_ACT is limited with the 4 quadratic torque limiter
(LIM_T1_POS, LIM_T1_NEG, LIM_T2_POS, LIM_T2_NEG).
Speed limiting:
- Speed controller. Check if the speed SCTRL_SPEED_REF is limited with the limits SCTRL_LIM_V_POS,
SCTRL_LIM_V_NEG or MOTOR_SPEED_MAX.
- Position controller. Check if the speed PCTRL_V_ACT is limited with the limit POS_CTRL_P_MAX.
Encoder position or speed contains an error: See error number 4014.
Motor wiring error: See error number 6045.
Motor defect: See error number 6045.
ACOPOS defect: See error number 6045.
4008: Positive limit switch reached
Info:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 18 di 164
Data type:
Description:
Runtime error when movement is active if the positive limit switch is reached in the positive direction of
movement.
Reaction:
Movement stopped with the axis limits. The controller remains switched on.
Cause/Remedy:
Movement command without target position or with incorrect target position.
SW limits are deactivated or are defined too large.
Slave movement range for cam automats is too large.
When slowly "exiting" a closed limit switch with the cam automats if the master position does not increase
steadily.
See also error number 4010.
4009: Negative limit switch reached
Info:
Data type:
Description:
Runtime error when movement is active if the negative limit switch is reached in the negative direction of
movement.
Reaction:
Movement stopped with the axis limits. The controller remains switched on.
Cause/Remedy:
See error number 4008.
4010: Controller cannot be switched on: Both limit switches are closed
Info:
Data type:
Description:
Response error using the 'switch on controller' command if the positive and negative limit switches are
closed.
Reaction:
The command is not executed.
Cause/Remedy:
The active input level of the limit switch is inverted.
Limit switch falsely closed due to an 'external force' (mechanically blocked, closed manually).
Falsely closed due to HW error (wire break, line termination, wiring error, supply voltage).
For 'endless axes' or 'cyclic axes' without limited movement range and without end switch:
Monitoring of the limit switch can also be deactivated (LIMIT_SWITCH_IGNORE) for an alternative use of
the digital inputs.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 19 di 164
4011: Controller cannot be switched off: Movement active
Info:
Data type:
Description:
Response error using 'switch off controller' command if a movement is active.
Reaction:
The command is not executed.
This does not interrupt the active movement.
Cause/Remedy:
The command was written too soon after a movement stop.
Request (delay step) for 'move complete' state is missing.
-> Check program sequence and status request.
4012: Controller cannot be switched on: Init parameters missing or not valid
Info:
Parameter ID
Data type:
'PARID'
Description:
Response error using 'switch on controller' command if at least one Init parameter is missing or was set to
an invalid value.
Reaction:
The command is not executed.
Cause/Remedy:
The command was written too soon in the initialization phase, before the configuration was completed.
Parameter initialization or request (delay step) for 'Global init' state is missing.
-> Check program sequence and status request.
4014: Two encoder control: Stop limit of positions difference exceeded
Info:
Current positions difference
Data type:
REAL
Description:
Runtime error when two-encoder position control is active. The difference between position encoder
position and motor encoder position is greater than AXLIM_DS_STOP2.
Reaction:
See error number 4007.
Cause/Remedy:
Error in the motor/position encoder configuration.
Tolerances in the drive mechanics (fluctuations in the spindle slope, backlash, thermal expansions in the
power transmission system, high accelerations and low rigidity in power transmission system) require a
larger AXLIM_DS_STOP2.
Defective drive mechanics (slip, coupling break)
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 20 di 164
Encoder position or speed contains an error:
Encoders which were not detected by the position encoder monitor or motor encoder monitor.
Check UP/DOWN LED on the encoder plug-in card and encoder position PCTRL_S_ACT.
Encoder does not meet the specifications of the plug-in card (compare the user's manual and the encoder
data sheet).
Encoder connection is interrupted or defective. See wiring guidelines error number 7030.
Encoder supply defect.
Encoder defective.
Plug-in card defective.
Resolver signal disturbance. See error number 7045.
Resolver signal disturbance. See error number 39002.
5001: Target position exceeds positive SW limit
Info:
Data type:
Description:
Response error at the start of a movement if the requested target position is larger than the positive SW
limit.
Response error when a movement in the positive direction is active if the current position is already outside
of the positive SW limits.
Reaction:
The requested movement start is not executed.
This will not interrupt an active movement.
Cause/Remedy:
SW limit incorrectly configured.
Incorrect target position.
Incorrect movement command.
The monitor of the SW limits can also be deactivated (SGEN_SW_END_IGNORE) for 'endless axes' or 'cyclic
axes' without limited movement range.
5002: Target position exceeds negative SW limit
Info:
Data type:
Description:
Response error at the start of a movement if the requested target position is smaller than the negative SW
limit.
Response error when a movement in the negative direction is active if the current position is already
outside of the negative SW limits.
Reaction:
See error number 5001.
Cause/Remedy:
See error number 5001.
5003: Positive SW limit reached
Info:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 21 di 164
Data type:
Description:
Runtime error when movement is active if the braking range of the positive SW limit has been reached and
the set speed is 0.
Reaction:
The movement is deactivated. The controller remains switched on.
Cause/Remedy:
Incorrect movement command without absolute target position (movement in positive direction).
Positive SW limit incorrectly configured.
Cam automat: The set value generation is too dynamic (speed or acceleration is too high) for the axis limit
AXLIM_A2_POS and therefore exceeds the range of the 'braking parabola' on the positive SW limit.
See also error number 5001.
5004: Negative SW limit reached
Info:
Data type:
Description:
Runtime error when movement is active if the braking range of the negative SW limit has been reached
and the set speed is 0.
Reaction:
The movement is deactivated. The controller remains switched on.
Cause/Remedy:
See error number 5003.
Negative SW limit incorrectly configured.
Cam automat: The set value generation is too dynamic (speed or acceleration is too high) for the axis limit
AXLIM_A2_NEG and therefore exceeds the range of the 'braking parabola' on the negative SW limit.
See also error number 5001.
5005: Start of movement not possible: Position controller inactive
Info:
Data type:
Description:
Response error when starting a movement if the position controller is not active.
Reaction:
The requested movement start is not executed.
Cause/Remedy:
'Switch on controller' command is missing.
Request (delay step) for 'controller on' state is missing.
The controller was switched off due to a drive error.
The controller was activated in a mode without position control, e.g. speed control. Check
CONTROLLER_MODE.
The enable input PCTRL_ENABLE_PARID deactivates position control.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 22 di 164
5006: Start of movement not possible: Axis not referenced
Info:
Data type:
Description:
Response error when starting a movement if the home position is not valid.
Reaction:
The requested movement start is not executed.
Cause/Remedy:
The 'reference' command is missing.
The status request (delay step) for 'reference completed' is missing.
The referencing procedure was aborted due to an error.
The monitor for 'reference' can also be deactivated (SGEN_SW_END_IGNORE) for 'endless axes' or 'cyclic
axes' without limited movement range.
5010: Move in pos. direction not possible: Pos. limit switch is closed
Info:
Data type:
Description:
Response error when starting a movement. The positive limit switch is closed and the requested movement
is moving in the positive direction.
Reaction:
The requested movement start is not executed.
Cause/Remedy:
Movement command or target position incorrect.
See also error number 4010.
5011: Move in neg. direction not possible: Neg. limit switch is closed
Info:
Data type:
Description:
Response error when starting a movement. The negative limit switch is closed and the requested
movement is moving in the negative direction.
Reaction:
See also error number 5010.
Cause/Remedy:
See also error number 5010.
5012: Start of movement not possible: Stop ramp active
Info:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 23 di 164
Data type:
Description:
Response error when starting a movement if a movement stop is active.
Reaction:
The requested movement start is not executed.
Cause/Remedy:
Missing status request (delay step) following a stop command.
The movement stop was triggered by a drive error.
A movement can also be started in the deceleration ramp after the 'halt basis movement' command.
5013: Cyclic set value mode cannot be switched on: Movement active
Info:
Data type:
Description:
Response error when switching on the operating mode 'cyclic, external set
values' (CMD_CYC_SET_VALUE_MODE) if a drive-controlled movement is active. A movement must first be
decelerated to standstill so that the new operating mode can be initialized and a set value generator
external to the drive can be applied without any jumps.
Reaction:
The operating mode 'cyclic, external set values' is not activated.
The current movement is not interrupted.
Cause/Remedy:
A referencing procedure or a basis movement is started and the status request (delay state) for 'move
complete' is missing.
5015: Start of movement not possible: Homing procedure active
Info:
Data type:
Description:
Response error using movement-start command if a homing procedure is active.
Reaction:
The requested movement start is not executed.
This does not interrupt the homing procedure.
Cause/Remedy:
The status request (delay step) for 'reference completed' is missing.
A homing procedure can be ended by a movement stop.
5016: Parameter cannot be written: Homing procedure active
Info:
Data type:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 24 di 164
Description:
Response error while writing a parameter if a homing procedure is active. 'Online' changes cannot be made
to the homing parameter.
Reaction:
The parameter value is not accepted.
This does not interrupt the active homing procedure.
Cause/Remedy:
The parameter was written too late, after the 'start homing procedure' command.
-> Check program sequence and status request.
5017: Homing procedure mode not possible: Position controller inactive
Info:
Data type:
Description:
Response error using 'start homing procedure' command. A homing mode was defined, which requires a
movement and is therefore only possible when control is active (e.g. homing mode ncSWITCH_GATE).
Reaction:
The homing procedure is not started.
The 'homing position valid' state is reset.
Cause/Remedy:
Incorrect homing mode.
Homing mode ncDIRECT with reference pulse.
'Switch on controller' command is missing.
Request (delay step) for 'controller on' state is missing.
The controller was switched off due to a drive error.
5018: Homing procedure not possible: Movement active
Info:
Data type:
Description:
Response error using 'start homing procedure' command if a movement is active. Homing "on the fly" is
not supported during an active movement.
Reaction:
See error number 5017.
The currently active movement is not interrupted.
Cause/Remedy:
Movement stop completed is missing.
Request (delay step) for 'move complete' state is missing.
5019: Homing parameter outside the valid range
Info:
Parameter ID
Data type:
'PARID'
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 25 di 164
Description:
Response error when writing a homing parameter or using 'start homing procedure' command. An invalid
configuration was detected.
Reaction:
The parameter value is not accepted.
When 'start homing procedure' command: See error number 5017.
Cause/Remedy:
According to the parameter ID in the additional info.
5020: Homing procedure not possible: Both limit switches are closed
Info:
Data type:
Description:
Response error using 'start homing procedure' command. The positive and negative limit switches are
closed.
Reaction:
See error number 5017.
Cause/Remedy:
See error number 4010.
5021: Limit switch closed: No direction change for this homing mode
Info:
Data type:
Description:
A homing mode was defined which does not allow a change of direction at the HW limits.
Response error if a limit switch in the start direction is already closed (ncABS_SWITCH) when the 'start
homing procedure' command is given.
Runtime error during homing procedure if a limit switch signal occurred (ncABS_SWITCH, ncEND_SWITCH).
Reaction:
When 'start homing procedure' command: See error number 5017.
When homing procedure: See error number 5035.
Cause/Remedy:
The HW limit was reached while searching for the edge of the absolute reference switch.
-> HW error at reference switch (wire break, line termination, wiring error, supply voltage).
The reference switch is mounted too close to the limit switch.
See also error number 4010.
5022: Second limit switch signal received: Reference switch not found
Info:
Data type:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 26 di 164
Description:
Runtime error during homing procedure if a limit switch signal has already occurred two times.
Reaction:
See error number 5035.
Cause/Remedy:
When searching for a reference switch edge or a reference pulse, the entire range between positive and
negative end switch was covered.
-> HW error at reference switch or encoder (wire break, line termination, wiring error, supply voltage).
False triggering at a limit switch due to 'bounce'.
See also error number 4010.
5023: Incorrect limit switch signal received for current movement direction
Info:
Data type:
Description:
Runtime error during homing procedure if the negative limit switch signal is reached in the positive
direction or if the positive limit switch signal is reached in the negative direction.
Reaction:
See error number 5035.
Cause/Remedy:
The reference switch is mounted too close to the limit switch.
See also error number 4010.
5024: Cyclic set value mode aborted: Set positions missing
Info:
Data type:
Description:
Runtime error in the operating mode, 'cyclic, external set values'. Linear extrapolation occurs if a new set
position (CYC_MASTER_SET_POS) is not received within the master cycle. This error is registered if this
failure occurs several times consecutively.
Reaction:
Movement stopped with the axis limits and by switching off the controller.
Cause/Remedy:
The operating mode 'cyclic, external set values' is activated too early, before set values are sent.
See error number 5110.
5025: Homing offset with counting range correction cannot be set
Info:
Data type:
Description:
Response error using 'start homing procedure' command. A homing mode was defined with counting range
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 27 di 164
correction (+ncCORRECTION). Automatic correction of the homing offset cannot be performed because the
encoder counting range with overflow is not unique in the entire movement range.
Reaction:
See error number 5017.
Cause/Remedy:
The maximum encoder counting range is smaller than the movement range between the SW limits.
-> Difference between the SW limits is too large. Load scaling (units per motor revolutions) is too small. No
absolute encoder (incremental encoder), encoder counting range is too small (e.g. only 'Single-Turn').
The testing limits exceeded the Integer32 counting range.
-> Value for the SW limits or load scaling is defined too large.
5026: Basis movement parameters (with override) exceed speed limit value
Info:
Data type:
Description:
Response error when starting a movement or writing the speed override. A speed value of the basis
movement parameter multiplied with the override is greater than the corresponding axis limit.
Reaction:
The requested movement start is not executed, and the speed override is not accepted.
This will not interrupt an active movement.
Cause/Remedy:
Speed override greater than 100%.
5027: Basis movement parameters (with override) exceed acceleration limit value
Info:
Data type:
Description:
Response error when starting a movement or writing the acceleration override. An acceleration of the basis
movement parameter multiplied with the override is greater than the corresponding axis limit.
Reaction:
The requested movement start is not executed, and the acceleration override is not accepted.
This will not interrupt an active movement.
Cause/Remedy:
Acceleration override greater than 100%.
5028: Current movement is not a basis movement
Info:
Data type:
Description:
Response error using 'halt basis movement' command if the active movement is not a basis movement.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 28 di 164
Reaction:
The requested command is not executed.
Cause/Remedy:
For example, the cam automat or the operating mode 'external, cyclic set values' is active.
-> The 'stop movement' command is allowed for any movement.
5029: Trigger ignored - remaining distance exceeds SW limit
Info:
Data type:
Description:
Runtime error when basis movement is active in the 'stop after trigger' mode. The trigger event has
occurred and the target position (latched position plus remaining distance) is outside the SW limits.
Reaction:
The trigger event is ignored and the movement remains active.
Cause/Remedy:
The remaining distance is too large or the SW limits are incorrectly defined.
An incorrect position (reference system to the trigger sensor) was set due to a previous homing procedure.
Trigger sensor too close to the end of the movement range.
Failure of the actual trigger edge (print marks, product edge) and triggering at a subsequent, undesired
trigger edge.
See also error number 5001.
5030: Homing procedure mode not possible: Position controller active
Info:
Data type:
Description:
Response error using 'start homing procedure' command. A homing mode was configured, which is only
possible when the controller is switched off (mode = ncINIT_SET_POS).
Reaction:
See error number 5017.
Cause/Remedy:
Incorrect homing mode.
The 'switch off controller' command is missing or was not executed in the drive state (movement active).
Request (delay step) for 'controller off' state is missing.
5031: Homing procedure mode not possible: Cyclic set values mode is off
Info:
Data type:
Description:
Response error using 'start homing procedure' command. A homing mode was configured, which is only
possible in the 'cyclic, external set values' mode (homing mode = ncINIT_SET_POS).
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 29 di 164
Reaction:
See error number 5017.
Cause/Remedy:
Incorrect homing mode.
The operating mode 'cyclic, external set values' was not switched on or was deactivated due to a drive
error.
5032: Acceleration too low - braking distance exceeds positive SW limit
Info:
Data type:
Description:
Response error when starting a movement or writing the acceleration override. A movement is active and
the acceleration was reduced to the point that the braking distance cannot be maintained up to the positive
SW limit.
Reaction:
The requested movement start is not executed, and the acceleration override is not accepted.
This does not interrupt the active movement.
Cause/Remedy:
Movement with absolute target position at the positive SW limits and start of a new movement with
reduced acceleration parameters shortly before the target.
See also error number 5001.
5033: Acceleration too low - braking distance exceeds negative SW limit
Info:
Data type:
Description:
Response error when starting a movement or writing the acceleration override. A movement is active and
the acceleration was reduced to the point that the braking distance cannot be maintained up to the
negative SW limit.
Reaction:
See error number 5032.
Cause/Remedy:
Movement with absolute target position at the negative SW limits and start of a new movement with
reduced acceleration parameters shortly before the target.
See also error number 5001.
5034: Homing procedure not possible: Encoder error
Info:
Data type:
Description:
Response error using 'start homing procedure' command. The corresponding encoder is in an error state.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 30 di 164
Reaction:
See error number 5017.
Cause/Remedy:
Detail information from additionally entered runtime error in the encoder.
5035: Reference marks not detected
Info:
Data type:
Description:
Runtime error while referencing with distance-coded reference marks. The movement range has already
exceeded the general distance, without two mark pulses having occurred (homing mode DCM).
Reaction:
The homing procedure is aborted.
The 'homing position valid' state is not reset.
Cause/Remedy:
See error number 7047.
5036: Acceleration stop limit exceeded
Info:
Acceleration
Data type:
REAL
Description:
Runtime error when cam automat is active or in the operating mode, 'cyclic, external set values'. The
acceleration of the set position exceeds the defined maximum value (LIM_A_SET_STOP).
Reaction:
Movement stopped with the axis limits and by switching off the controller.
Cause/Remedy:
When active cam automats:
Maximum value (LIM_A_SET_STOP) too small.
Set value generation is too dynamic. Speed and acceleration are too high due to:
Overriding additional movements on the additive axes.
External encoder with 'coarse' resolution as master axis.
The dynamics of the master movement are not taken into consideration when forming the curve.
External master with 'unknown' movement dynamics.
Online change of the multiplication factors.
See error number 5101 for compensation gears.
Cam automat is terminated from a curve with a slope not equal to 0 (EVENT_ST_INDEX=255).
Direct start of the cam automat with moved master from an active basis movement.
Set position jumps due to:
Referencing the master axis or the additive axes.
Jump-causing value change on the additive axes.
Small positions offset between cam profiles and within the polynomial. See error number 37111.
Network error while coupling the master axis to a cyclic network position.
Lag error stop in the master axis (set value jumps to actual value).
In the operating mode, 'cyclic, external set values':
Maximum value (LIM_A_SET_STOP) too small.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 31 di 164
Set value generation is too dynamic. Speed and acceleration are too high.
Faulty set value generation.
Actual/set value set falsely after the controller is switched on or following a drive-controlled movement
(homing).
Jump-causing value change of the additive offset (CYC_ADD_SET_PARID).
Network error.
5101: Cam profile compensation gears: Limit values exceeded
Info:
Data type:
Description:
Runtime error when cam automats are active during the calculation of a compensation gear. The speed or
acceleration limits cannot be maintained with the combination of current parameters, connection curves
and compensation paths. On the other hand, the 'effective' master/slave compensation paths result
depending on compensation modes, compensation path parameters, multiplication factors and curve
periods. Is only registered once following a start or restart.
Reaction:
The compensation is calculated using excessive values.
For example, the maximum slave speed is increased by the entry or exit speed.
Cam automat movement remains active. However, subsequent errors may occur (e.g. error number 4007).
Cause/Remedy:
'Effective' master compensation path too short. See also error number 37108.
'Effective' master compensation path too long in connection with AUT_COMP_SL_V_MIN.
'Effective' slave compensation path too short or too long. See also error number 37101 and
Error number 37102.
Maximum speed value of the master axis AUT_MA_V_MAX too large.
Maximum speed value of the master axis AUT_MA_V_MAX too small in connection with
AUT_COMP_SL_V_MIN.
Exit slope of the curve of the 'old' state is too large.
Entrance slope of the curve of the 'new' state is too large (multiplication factor of the slave axis).
Maximum slave speed value AUT_COMP_SL_V_MAX too small.
Minimum slave speed value AUT_COMP_SL_V_MIN too large.
Maximum slave acceleration value in the first part of the compensation AUT_COMP_SL_A1_MAX too small.
Maximum slave acceleration value in the second part of the compensation AUT_COMP_SL_A2_MAX too
small.
5102: Too many changes of cam profile per cycle (master period too short)
Info:
Data type:
Description:
Runtime error when cam automats are active if consecutive scan cycles (calculation cycle 400us) require a
cam profile change each time. A maximum of one cam profile change is executed in a scan cycle. If this
maximum 'frequency of change' is no longer sufficient, then the cam profiles lose their shape and the
position relationship between the master and slave is lost.
Reaction:
Cam automat movement aborted with the axis limits.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 32 di 164
Cause/Remedy:
Speed too high in the master axis or an additive axis.
Position jumps in the master axis or an additive axis.
Master period of a cam profile or a compensation gear too short.
Master multiplication factor too small.
Change-of-state event with the attribute ncAT_ONCE occurs too often.
See also error number 5036.
5103: Slave trigger FIFO full
Info:
Data type:
Description:
Runtime error when cam automat is active (CMD_CAM_START) if the trigger FIFO for the slave axis is full.
Reaction:
See error number 5102.
Cause/Remedy:
Too many faulty triggers in connection with a trigger window which is too large. This mostly happens if the
trigger window is larger than the half interval (CAM_SL_TRIG_WINDOW > (CAM_SL_S_SYNC +
CAM_SL_S_COMP) / 2).
5104: Slave trigger FIFO empty
Info:
Data type:
Description:
Runtime error when cam automat is active (CMD_CAM_START) if the trigger FIFO for the slave axis is
empty.
Reaction:
See error number 5102.
Cause/Remedy:
Trigger signal when FIFO size is 1 (CAM_SL_S_TRIG small) in connection with a large trigger window
(CAM_SL_TRIG_WINDOW). When a trigger failure occurs, a replacement value is entered after the window
position is exceeded.
5105: Master trigger FIFO full
Info:
Data type:
Description:
Runtime error when cam automat is active (CMD_CAM_START) if the trigger FIFO for the master axis is
full.
Reaction:
See error number 5102.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 33 di 164
Cause/Remedy:
Too many false triggers when a FIFO length is at the maximum limit (CAM_MA_S_TRIG large and
(CAM_MA_S_SYNC + CAM_MA_S_COMP) small). This mostly happens if the trigger window is larger than
the half interval (CAM_MA_TRIG_WINDOW > (CAM_MA_S_SYNC + CAM_MA_S_COMP) / 2).
5106: Master trigger FIFO empty
Info:
Data type:
Description:
Runtime error when cam automat is active (CMD_CAM_START) if the trigger FIFO for the master axis is
empty.
Reaction:
See error number 5102.
Cause/Remedy:
No trigger signal when FIFO size is 1 (CAM_MA_S_TRIG small) in connection with a large trigger window
(CAM_MA_TRIG_WINDOW).
The information 'Product not available' is entered after the window position has been exceeded.
5107: Cam coupling cannot be started: Parameter outside the valid range
Info:
Parameter ID
Data type:
'PARID'
Description:
Response error at start and restart of the cam automat (CMD_CAM_START) if an invalid configuration was
detected.
Reaction:
The cam automat start is not executed.
Cause/Remedy:
The parameter ID of the additional information differentiates between the following causes:
CAM_MA_S_START
The current master position has already exceeded CAM_MA_S_START.
CAM_MA_V_MAX
The slave speed exceeds the axis limit value. This means that the maximum speed of the master axis or
the cam profile slope is too large ((CAM_MA_V_MAX * CAM_SL_S_SYNC / CAM_MA_S_SYNC) >
AXLIM_V_POS).
CAM_SL_S_COMP_MIN
Slave axis compensation path is smaller than the minimum value (CAM_SL_S_COMP <
CAM_SL_S_COMP_MIN)
CAM_SL_S_COMP_MAX
Slave axis compensation path is larger than the maximum value (CAM_SL_S_COMP >
CAM_SL_S_COMP_MAX)
CAM_MA_TRIG_WINDOW
Master axis trigger window is larger than the interval (CAM_MA_TRIG_WINDOW > (CAM_MA_S_SYNC +
CAM_MA_S_COMP))
CAM_MA_COMP_TRIG_WINDOW
Master axis compensation trigger window is larger than the interval (CAM_MA_COMP_TRIG_WINDOW >
(CAM_MA_S_SYNC + CAM_MA_S_COMP))
CAM_SL_TRIG_WINDOW
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 34 di 164
Slave axis trigger window is larger than the interval (CAM_SL_TRIG_WINDOW > (CAM_SL_S_SYNC +
CAM_SL_S_COMP))
CAM_MA_S_TRIG
Master trigger FIFO exceeds the maximum length. This means the relative trigger position of the master
axis is too large or the interval is too small.
CAM_MA_S_COMP_TRIG
Master compensation trigger FIFO exceeds the maximum length. This means the relative position
compensation trigger of the master axis is too large or the interval is too small.
CAM_SL_S_TRIG
Slave trigger FIFO exceeds the maximum length. This means the relative trigger position of the slave axis
is too large or the interval is too small.
5108: Master compensation trigger FIFO full
Info:
Data type:
Description:
Runtime error when cam automat is active (CMD_CAM_START) if the compensation trigger FIFO for the
master axis is full.
Reaction:
See error number 5102.
Cause/Remedy:
Too many false triggers when a FIFO length is at the maximum limit (CAM_MA_S_COMP_TRIG large and
(CAM_MA_S_SYNC + CAM_MA_S_COMP) small).
This mostly happens if the trigger window is larger than the half interval (CAM_MA_COMP_TRIG_WINDOW
> (CAM_MA_S_SYNC + CAM_MA_S_COMP) / 2).
5109: Master compensation trigger FIFO empty
Info:
Data type:
Description:
Runtime error when cam automat is active (CMD_CAM_START) if the compensation trigger FIFO for the
master axis is empty.
Reaction:
See error number 5102.
Cause/Remedy:
No trigger signal when FIFO size is 1 (CAM_MA_S_COMP_TRIG small) in connection with a large trigger
window (CAM_MA_COMP_TRIG_WINDOW).
The information 'Product not available' is entered after the window position has been exceeded.
5110: Cam coupling aborted: Cyclic set positions missing
Info:
Data type:
Description:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 35 di 164
Runtime error while coupling to a cyclic network position (MA1/2/3_CYCLIC_POS). Linear extrapolation
occurs if a new set position is not received within the master cycle. This error is registered if this failure
occurs several times consecutively.
Reaction:
Movement aborted with the axis limits and coupling aborted.
Cause/Remedy:
Coupling is activated too soon, before set values are sent.
The sending of set values was not activated or the master station failed.
The master cycle is too short or the network load is too high.
Disturbance or disconnection of the network connection. See also error number 1012.
5111: Cam coupling aborted: Encoder error
Info:
Data type:
Description:
Runtime error when cam automat is active if the master axis is made up of an encoder position and the
encoder evaluation detects an error.
Reaction:
See error number 5102.
Cause/Remedy:
Detail information from additionally entered runtime error in the encoder.
5112: Command not allowed: Cam profile coupling not active
Info:
Data type:
Description:
Response error using the 'Switch controller on/off when cam automat is active' command if the automat is
not active (CMD_CAM_CONTROLLER and CMD_AUT_CONTROLLER).
Reaction:
The command is not executed. The controller state remains unchanged.
Cause/Remedy:
The cam automat was not started.
The cam automat was ended due to a drive error or a command.
5113: Command not allowed: Controller is already active
Info:
Data type:
Description:
Response error using the 'Switch on controller when cam automat is active' command if the controller is
already on (CMD_CAM_CONTROLLER=ncSWITCH_ON).
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 36 di 164
Reaction:
The controller state remains unchanged.
Cause/Remedy:
The controller was already on.
The controller was not switched off earlier.
-> Check program sequence and status request.
5114: Parameter cannot be written: Cam coupling active
Info:
Data type:
Description:
Response error while writing a parameter, which does not allow an online change when the controller is
active (CMD_CAM_START).
Reaction:
The parameter value is not accepted.
Cause/Remedy:
The parameter was written too late (after the cam automat start).
The parameter was written too soon (before the cam automat movement was aborted).
-> Check program sequence and status request.
5115: Restart command not possible: The cam automat is not active
Info:
Data type:
Description:
Response error when restarting (ncRESTART) the cam automat if the automat function is not active.
Reaction:
The cam automat restart is not executed.
Cause/Remedy:
The cam automat has not yet ever been started 'normally' using ncSTART.
The cam automat was terminated previously using ncSTOP.
The cam automat was previously terminated using the end state 255 (only for CMD_AUT_START).
5201: Parameter cannot be written: Drumsequencer active
Info:
Data type:
Description:
Response error while writing a parameter, which does not allow an online change when the drum
sequencer is active (CMD_DRUMSEQ=ncSTART).
Reaction:
The parameter value is not accepted.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 37 di 164
Cause/Remedy:
The parameter was written too late (after the drum sequencer start).
The parameter was written too soon (before the cam automat movement was aborted).
-> Check program sequence.
5202: Drumsequencer: Switch positions not in ascending order
Info:
Data type:
Description:
Response error using the drum sequencer (CMD_DRUMSEQ=ncSTART) or using the drum sequencer
function block (CAMCON_CAM_S2). The start position of a cam in the interval is larger than the end
position or the positions of neighboring cams overlap.
Reaction:
The drum sequencer (CMD_DRUMSEQ) is not started.
The parameter value (CAMCON_CAM_S2) is not accepted.
Cause/Remedy:
Cams were not deactivated when reconfiguring or the number of cams was not reduced ('old cams'
remain).
The configuration order was switched (first the start position, then the end position).
5300: Data block for upload is not available
Info:
Data type:
Description:
Response error when initializing a data upload (data block read access) if no data is present at the current
index.
For example; cam profile data or data from a parameter sequence.
Reaction:
Data block read access is not initialized. The upload cannot be executed.
Cause/Remedy:
Invalid data index.
A download has not yet been performed for the data index.
The download for the data index was executed earlier with invalid data.
5302: Parameter cannot be written: Cam automat active
Info:
Data type:
Description:
Response error while writing a parameter, which does not allow an online change when the cam automat is
active (CMD_AUT_START).
Reaction:
The parameter value is not accepted.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 38 di 164
Cause/Remedy:
The parameter was written too late (after the cam automat start).
The parameter was written too soon (before the cam automat movement was aborted).
-> Check program sequence and status request.
5303: Cam profile data not available at index
Info:
Data type:
Description:
Response error while writing a data index if no cam profile data is present at this index.
Reaction:
The data index is not accepted.
Cause/Remedy:
See error number 5300.
See error number 5304.
5304: Format error in cam profile data
Info:
Detail
Data type:
UINT
Description:
Response error at the last data segment of the cam profile download (AUT_POLY_DATA). The polynomial
data is checked for validity before the cam profile is accepted.
Reaction:
The new cam profile is not accepted.
A previously valid cam profile with this data index is kept.
Cause/Remedy:
Detail
1: The number of polynomials does not fall within the range of 1-64.
2: The coefficient a1 for the y-shift of the 1st polynomial is not 0.
3: Invalid float value range for a coefficient.
4: A polynomial master position xi is negative or smaller than the previous master position.
5: The last master position xn does not correspond to the master interval (period).
6: The polynomial function value y(xn) at the end of the master interval does not correspond to the slave
interval. See also error number 37111.
7: The length of the master period (period) is too small or is negative.
8: The number of bytes in the data block does not fall within the range of 1-64 polynomials.
9: The value for 'reserve' is not 0.
5311: Cam automat: Event leads to non initialized state
Info:
Data type:
Description:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 39 di 164
Response error while writing CMD_AUT_ST_CHECK. Parameter checks of the automat state are performed.
Reaction:
None.
Cause/Remedy:
An event was configured in this state, which leads to a state without valid cam profile data.
The event was incorrectly configured (AUT_EVENT_ST_INDEX).
The state at AUT_EVENT_ST_INDEX has not yet been completely configured.
5315: Download error: Cam profile data in use by cam automat or function block
Info:
Data type:
Description:
Response error at the last data segment of the cam profile download (AUT_DATA_INDEX,
AUT_POLY_DATA). A download for this data index has already been executed several times (online change
of cam profiles). These cam profiles have not yet been enabled and too many cam profiles are now being
used with the same index.
Reaction:
The new cam profile is not accepted.
A previously valid cam profile with this data index is kept.
Cause/Remedy:
Download to the wrong data index.
The lock for consistent online parameter change (AUT_ONL_PAR_LOCK) is not reset.
Too many instances are using the same cam profile. For example, cam automat real and virtual axis,
CURVE function blocks.
The cam profile is not enabled (e.g. the cam profile master axis does not move, therefore remaining in the
curve).
CURVE function blocks continually block a curve.
-> For online change and static application, no common data index should be used. If the same cam profile
is required, it can be transferred to a second data index.
5316: Event type ncST_END+ncNEGATIVE is not possible for entry in
compensation gears
Info:
Data type:
Description:
Response error while writing CMD_AUT_ST_CHECK. Parameter checks of the automat state are performed.
Reaction:
None.
Cause/Remedy:
An event for the negative direction of movement was configured in this state
(AUT_EVENT_TYPE=ncST_END+ncNEGATIVE), which causes a state with compensation gears. The
calculation of a compensation is only executed for the positive direction.
5317: Start of cam automat leads to non initialized state
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 40 di 164
Info:
Data type:
Description:
Response error at the start of the cam automat (CMD_AUT_START) directly in a certain state. In this state,
there is no cam profile data at AUT_START_ST_INDEX or the state was selectively deactivated
(AUT_ST_DATA_INDEX=0).
Reaction:
The cam automat start is not executed.
Cause/Remedy:
The state has not yet been completely configured.
Invalid state index.
5318: Relative distance of master axis higher than cam profile period
Info:
Data type:
Description:
Response error at the start of the cam automat (CMD_AUT_START, AUT_START_ST_INDEX) directly in a
certain state. The parameter AUT_CAM_MA_S_REL, for the master start position within the curve exceeds
the total length of the curve.
Reaction:
The cam automat start is not executed.
Cause/Remedy:
Invalid state index.
AUT_CAM_MA_S_REL is too large.
Master interval of the curve is too small.
Multiplication factor for the master axis is too small.
5319: Cam profile data not allowed for state 0
Info:
Data type:
Description:
Response error while writing AUT_ST_DATA_INDEX. Only the data index 0 is allowed in the basis state
(AUT_ST_INDEX=0). It is not possible to use a cam profile.
Reaction:
None.
Cause/Remedy:
Invalid data index or state index.
In the event that the cam automat being with a cam profile, the respective state can be configured with
AUT_START_ST_INDEX (direct start).
5329: No valid cam profile data or state deactivated
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 41 di 164
Info:
Data type:
Description:
Response error while writing CMD_AUT_ST_CHECK. Parameter checks of the automat state are performed.
Reaction:
None.
Cause/Remedy:
There is no cam profile data in this state.
The state was selectively deactivated (AUT_ST_DATA_INDEX=0).
The state has not yet been completely configured.
6000: Master sampling time is not a multiple of position controller sampling time
Info:
Data type:
Description:
Response error while writing the master cycle time. The master cycle time cannot be divided by the
position controller cycle time (400us).
Reaction:
The master cycle time is not accepted.
Cause/Remedy:
See error number 1002.
When using Powerlink, see also error number 1012.
6001: Sync controller: Timeout for sync telegram occurred
Info:
Data type:
Description:
Runtime error during drive synchronization. No synchronization telegram was received within the 5x period
duration of the synchronization telegram SYNC_MSG_PERIOD.
Reaction:
The 'drive synchronous' state is reset.
Position jumps can occur during network coupling.
Set value jumps can occur during the operating mode 'external, cyclic set values'.
Cause/Remedy:
Synchronization master was switched off or failed (application, power failure, voltage drop, AC110 plug-in
card defective)
Network connection to the synchronization master is defective or has been interrupted. See wiring
guidelines error number 7030.
Check terminating resistors.
Defective bus station in the entire system.
The network load is too high. As a result, the synchronization telegram is sent with a delay due to its low
priority.
This error can only occur in a CAN network.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 42 di 164
6002: Sync controller: Error tolerance of system time difference exceeded
Info:
Data type:
Description:
Runtime error during drive synchronization. The deviation of the master system time to the slave system
time SYNC_SYS_TIME_DIFF is too high.
Reaction:
See error number 6001.
Cause/Remedy:
The deviation of the quartz frequencies from master to slave which make up the system time is too high.
In a CAN network with low-level drive synchronization, the synchronization telegram was transferred with a
delay due to high network load.
When using Powerlink, see error number 1012.
6008: Controller is already active
Info:
Data type:
Description:
Response error using the commands 'Set controller mode' and 'Switch on controller'. Switching the
controller mode while the controller is active is not allowed.
Reaction:
The command is not executed.
Cause/Remedy:
The controller must be switched off before the command is written.
6011: Controller is not in speed mode
Info:
Data type:
Description:
Response error while writing a set speed value SCTRL_SPEED_REF, SCTRL_V_SET_UNITS,
SCTRL_V_SET_SCALE. The parameter cannot be written while the controller mode is active.
Reaction:
Set speed value is not accepted.
Cause/Remedy:
A set speed value can only be written in the following controller modes:
- Speed control (CONTROLLER_MODE = 2)
- Position control (CONTROLLER_MODE = 1 or 3) with deactivated position controller
6014: Drive initialization active
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 43 di 164
Info:
Data type:
Description:
Runtime error using the 'switch on controller' command. See also error number 4005.
An initialization accesses the FLASH memory. The controller may not be switched on during access.
Reaction:
See error number 4005.
Cause/Remedy:
An initialization was started by changing the encoder type from ncINC to ncSSI when using an AC123 plugin card. The command 'switch on controller' was made during this phase.
-> Request the status 'controller ready' before the command 'switch on controller'.
6015: CAN controller: CAN bus disturbance (receive error counter greater 96)
Info:
Slot
Data type:
USINT
Description:
Runtime error when using an AC110 plug-in card. Any CAN network node can detect malfunctions. To do
this, a CAN node contains a send and receive error counter, which is incremented when a send or receive
procedure containing an error is detected and is decremented when a send or receive procedure occurs
without errors. The error counter is incremented further when an error occurs than it is decremented when
the transfer is successful.
Therefore, the state of the error counter is a measurement for the relative frequency of disturbances. If a
network node detects an error which only has local effects, then the error flag triggered by this node
causes a subsequent signal to all other network nodes. Using the point in time that the error flag was
completed, the network nodes know if they were the first to signal the error. To localize the error, receiveerrors and send-errors in the node that signaled an error while receiving or sending the node are
incremented by a considerably higher amount (9x or 8x) than the counter of the secondary signalizing
node. If the first detection of an error by the same node exceeds a certain frequency, then it is very likely
that this node is defective. By exceeding certain error counter limits measures are taken to limit the
influence of an affected node on the network. These measures include the notification of an increased error
counter state, prohibiting the sending of active error flags when a high error counter state is reached and
automatically switching off the node when a very high send-error counter state is reached. The counter
state cannot be read.
This error notifies of the arrival of the receive-error counter state 96.
See also error number 4005.
Reaction:
See error number 1004.
Cause/Remedy:
The network is interrupted or defective. See wiring guidelines error number 7030.
Check terminating resistors.
AC110 plug-in card defective.
CAN network defective in the entire system.
6016: CAN controller: CAN bus disturbance (transmit error counter greater 96)
Info:
Slot
Data type:
USINT
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 44 di 164
Description:
Runtime error in the CAN network. This error notifies of the arrival of the send-error counter state 96.
See error number 6015.
Reaction:
See error number 1004.
Cause/Remedy:
CAN bus stations with the same node number in the entire system.
See also error number 6015.
6017: Software: Watchdog active
Info:
Data type:
Description:
Runtime error during the processing of operating system functions with middle priority. A timeout occurred
during a function call. Network communication can no longer be guaranteed.
See also error number 4005.
Reaction:
See error number 1004.
Cause/Remedy:
ACOPOS hardware defect.
Operating system malfunction.
6018: Hardware: 15V power supply fail
Info:
Data type:
Description:
Runtime error in the hardware monitor using the 'switch on controller' command or while the controller is
active. See also error number 4005.
The internal 15V supply voltage is defective. Depending on the hardware this supply is used for the plug-in
cards, fans, current measurement, DC bus relay, etc.
Reaction:
See error number 6021.
Cause/Remedy:
Failure or voltage dip in the 24VDC supply voltage for the servo drive.
Failure or voltage dip in the mains supply for the servo drive.
ACOPOS hardware defect.
6019: ACOPOS: Overcurrent
Info:
Data type:
Description:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 45 di 164
Runtime error if at least one of the six transistors in the inverter or the transistor for the braking resistor
registers overcurrent.
When using the following ACOPOS servo drives, this error is also registered for overcurrent in the current
transformer (U and V):
8V1180.xx-x....95.4 Apeak
8V1320.xx-x....160.4 Apeak
8V1640.xx-x....400.0 Apeak
8V128M.xx-x....585.0 Apeak
Reaction:
Synchronous motor: Movement stop with short-circuit braking.
Asynchronous motor: Movement stop by switching off the power section and switching on the holding
brake.
If the error occurs two times consecutively, then a movement is stopped by switching off the power section
and switching on the holding brake.
Cause/Remedy:
Motor wiring error:
- Phase and ground conductor switched. -> Check if the ground conductor PE in the motor cable on the X5
plug is connected with motor phase U, V or W.
- Short circuit in the motor cable. Short circuit between two phases, ground PE and phase or shield and
phase. -> Check the resistance between U-V, V-W, W-U, U-PE, V-PE, W-PE, U-shield, V-shield and Wshield.
Motor defect:
- Winding short in a motor phase. -> Check on the motor plug and on the motor terminals if two of the
three motor impedances (phase-phase) have lowered.
- Winding short between two motor phases. -> Check on the motor plug and on the motor terminals if one
of the three motor impedances (phase-phase) has lowered.
- Housing short between motor phase and housing. -> Using a continuity tester or a megohmmeter, check
the insulation resistance between the motor phases and the housing.
ACOPOS servo drive defect:
- Alloyed transistor or control in a half-bridge defective. -> Check if the error is also registered when the
motor cable is unplugged.
- Alloyed transistor or control for braking resistor defective. -> Check if the error is registered when the DC
bus voltage UDC_ACT is greater than the switch-on voltage of the braking resistor UDC_BLEEDER_ON.
- Problem with current measurement. -> Check the phase current when the power section is switched off.
External braking resistor defect:
- Short circuit. -> Check if the error is also registered when the external braking resistor is not connected.
Set current value jump: See error number 9300. This cause is more likely on devices with current
transformer monitoring.
6020: Hardware: 24V power supply fail
Info:
Data type:
Description:
Runtime error in the hardware monitor using the 'switch on controller' command or while the controller is
active. See also error number 4005.
The 24VDC supply voltage has sunk below the minimum limit (see ACOPOS user's manual).
Reaction:
See error number 6021.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 46 di 164
Cause/Remedy:
Supply voltage via DC bus power supply:
Problems with the VAC power supply (wire breakage, control, power failure, dip in power, etc)
Voltage supply via an external power supply:
Problem with the 24VDC supply voltage (cable breakage, control, power supply overload, power supply
failure, etc)
ACOPOS hardware defect.
6021: Low level at controller enable input
Info:
Data type:
Description:
Runtime error in the hardware monitor using the 'switch on controller' command or while the controller is
active. The controller enable input is not being supplied with enough voltage.
Reaction:
When 'switch on controller' command: See error number 4005.
When controller is active:
Movement stop by switching off the IGBT output stage and switching on the holding brake.
The 'controller ready' state is reset.
Cause/Remedy:
Triggered by external operation or external factors (application program or manual operation).
False triggering due to defective hardware or malfunctions (broken connection, line termination, wiring
error, control hardware defective or failed, ACOPOS 24VDC supply voltage, malfunctions). See also wiring
guidelines error number 7030.
ACOPOS hardware defect.
6022: Current controller: Permissible current offset values exceeded
Info:
Data type:
Description:
Runtime error while switching on the current controller. The offset values for current measurement are
aligned in this phase. The power level is switched on and the motor is supplied with zero voltage. The
measured currents were too large for the offset alignment.
Reaction:
Movement stop by switching off the IGBT output stage and switching on the holding brake.
Cause/Remedy:
When using a synchronous motor, the rotor (secondary element) is in motion while the controller is being
switched on. As a result, voltage is induced and the current is supplied in the DC bus during the current
offset alignment. The measured current is interpreted as offset current.
ACOPOS hardware defect (current measurement, IGBT module, IGBT controller).
6023: Voltage sag at controller enable input
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 47 di 164
Info:
Data type:
Description:
Runtime error in the hardware monitor using the 'switch on controller' command or while the controller is
active. A voltage sag occurs on the controller enable input (contact ENABLE on connector X1).
Reaction:
When 'switch on controller' command: See error number 4005.
When controller is active:
Movement stop by switching off the IGBT output stage and switching on the holding brake.
The 'controller ready' state is reset.
Cause/Remedy:
Triggered by external operation or external factors (application program or manual operation).
False triggering due to defective hardware or malfunctions (broken connection, line termination, wiring
error, control hardware defective or failed, ACOPOS 24VDC supply voltage, malfunctions). See also wiring
guidelines error number 7030.
ACOPOS servo drive defect.
6024: Current was latched before conversion (OpSys error in ABLS)
Info:
Data type:
Description:
Runtime error while reading the measured line currents. The line currents and temperatures are recorded
consecutively per cycle (multiplexed). The exact time of the read access to the converted current values
took place while recording the temperature. Read access in this timeframe causes incorrect current values.
Reaction:
See error number 6021.
Cause/Remedy:
Error in the operating system
This error could only occur on ACOPOS servo drives 8Vxxxx.00-1.
6025: Temperature was latched before conversion (OpSys error in ABLS)
Info:
Data type:
Description:
Runtime error while reading the measured motor and heat sink temperatures. The line currents and
temperatures are recorded consecutively per cycle (multiplexed). The exact time of the read access to the
converted temperature values took place while recording the current. Read access in this timeframe causes
incorrect temperature values.
Reaction:
See error number 6021.
Cause/Remedy:
See error number 6024.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 48 di 164
6026: Holding brake: Stator current limit exceeded during release
Info:
Data type:
Description:
Runtime error using the 'switch on controller' command when holding brake monitor is active. The
maximum current flows while opening (releasing) the holding brake MIN(ACOPOS_CURR_MAX,
MOTOR_CURR_MAX).
Reaction:
See error number 6022.
Cause/Remedy:
The current controller is unstable.
The time for opening (releasing) the holding break is too long and the controller is set too 'soft'.
6027: Holding brake: Manual operation not permitted
Info:
Data type:
Description:
Response error when operating the holding brake with the command CMD_BRAKE. Manual operation of the
holding brake is not allowed while the controller is active.
Reaction:
The command is not executed.
Cause/Remedy:
Manual operation of the holding brake while the controller is active was not switched on via the holding
brake mode (bit 1 in BRAKE_MODE not set).
6028: Holding brake: Undervoltage/-current (wire breakage, check 24V supply)
Info:
Data type:
Description:
Runtime error using the 'switch on controller' command when holding brake monitor is active.
See error number 6029.
Reaction:
See error number 1011.
Cause/Remedy:
Holding brake or external relay does not fulfill the drive specifications (input resistance too large,..).
Deactivate monitor respectively set bit 2 in the BRAKE_MODE.
Holding brake connection defective (broken connection, wiring error)
ACOPOS 24VDC supply voltage malfunction (dip in power, mains overload).
ACOPOS defective (Holding brake control, signal level monitoring, internal relay)
External relay defective or incorrectly controlled.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 49 di 164
Holding brake defective.
6029: Holding brake: Control signal on and output status off
Info:
Data type:
Description:
Runtime error during holding brake control monitor is active. The holding brake was not supplied with
sufficient current and voltage within 500ms while the holding brake gating signal was on.
Reaction:
If the controller is switched off: None.
See error number 6028.
Cause/Remedy:
See error number 6028.
6030: Holding brake: Brake output is active, but no brake entered in motor data
Info:
Data type:
Description:
Runtime error using the 'switch on controller' command when holding brake monitor is active. Current is
flowing to the holding brake output even though a holding brake was not specified in the motor parameter
block.
Reaction:
See error number 6022.
Cause/Remedy:
Incorrect configuration of the holding brake in the motor parameter block.
The output for the holding brake is being used for another functionality and the brake monitor has not been
deactivated (bit 2 in the BRAKE_MODE not set).
6031: System module already deleted
Info:
Data type:
Description:
Response error while deleting an NC system module. The operating system 'acp10sys.br' or BsLoader
'acp10bsl.br' to be deleted is not present on the drive.
Reaction:
The 'delete NC system module' command is not executed.
Cause/Remedy:
There is no NC system module to delete.
6032: Interface: FPGA configuration error
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Info:
Slot
Data type:
USINT
Pagina 50 di 164
Description:
Runtime error during initialization of a plug-in card. An error occurred while configuring a FPGA function
block.
Reaction:
Plug-in card not supported
Cause/Remedy:
Plug-in card defective.
PROM data from the plug-in card contains errors.
ACOPOS hardware defect (bus board, plug, internal SSI bus).
6033: Type of servo amplifier is not supported by ACOPOS-firmware
Info:
Data type:
Description:
Runtime error while starting up the driver. PROM data from the drive is not compatible with the firmware.
See also error number 4005.
Reaction:
See error number 4005.
Cause/Remedy:
Drive not supported by the firmware
ACOPOS hardware defect (incorrect PROM data on drive, internal SSI bus defect).
6034: Cyclic set value mode aborted: Set speeds missing
Info:
Data type:
Description:
Runtime error while speed control is active with cyclic set values. No speed set value was received from the
network for at least 3 master cycles.
Reaction:
See error number 4007.
Cause/Remedy:
Drive is not supplied with enough speed set values -> check application program.
See error number 5110.
6036: Motor parameters missing or invalid
Info:
Parameter ID
Data type:
'PARID'
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 51 di 164
Description:
Response error using the 'switch on controller' or 'burn motor data' commands. The motor parameter block
was not completely initialized.
Reaction:
The command is not executed.
Cause/Remedy:
At least one motor parameter was not written or was written incorrectly.
The motor type was not written as first parameter in the motor parameter block. The initialization status of
all motor parameters is reset by writing the motor type; that means that all motor parameters must
subsequently be rewritten.
The motor data in motors with EnDat encoders could not by read by the EnDat encoder memory (encoder
error, OEM motor, no motor data in the encoder memory).
6038: Torque limit higher than peak motor torque
Info:
Peak motor torque
Data type:
REAL
Description:
Response error when writing a parameter for the torque limit (torque limit or torque limit override). An
active torque limit would be larger than the peak motor torque by writing the parameter.
Reaction:
Torque limit is not accepted.
Cause/Remedy:
Torque limit or torque limit override is too large for the motor parameter block.
See also error number 1002.
6040: Operating system version is less than allowed minimum version
Info:
Data type:
Description:
Response error when writing the minimum required version BSYS_VERS_MIN if the ACOPOS operating
system version is lower than BSYS_VERS_MIN.
Reaction:
The 'controller ready' state is reset. See error number 4005.
Cause/Remedy:
Invalid operating system version. Update operating system. See error number 32018.
See error number 1002.
6041: Operating system version is greater than allowed maximum version
Info:
Data type:
Description:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 52 di 164
Response error when writing the maximum allowed version BSYS_VERS_MAX if the ACOPOS operating
system version is higher than BSYS_VERS_MAX.
Reaction:
The 'controller ready' state is reset. See error number 4005.
Cause/Remedy:
Invalid operating system version. Update operating system. See error number 32018.
See error number 1002.
6042: Operating system version is not in the allowed range
Info:
Data type:
Description:
Runtime error when switching on the controller if the minimum required version BSYS_VERS_MIN is lower
than the ACOPOS operating system version or the maximum allowed version BSYS_VERS_MAX is higher
than the ACOPOS operating system version.
Reaction:
The 'controller ready' state is reset. See error number 4005.
Cause/Remedy:
See error number 6040.
See error number 6041.
6043: PHASING_MODE is not valid
Info:
PHASING_MODE
Data type:
UINT
Description:
Runtime error when switching on the controller if an incremental encoder was used as motor encoder and
the wrong PHASING_MODE was selected for determining the commutation offset
MOTOR_COMMUT_OFFSET.
Reaction:
The startup procedure is cancelled.
Cause/Remedy:
Permissible values for PHASING_MODE:
0: Saturation mode
2: Dither mode
Non-permissible values for PHASING_MODE:
1: Stepper mode would cause invalid movements.
3: Direct mode not supported.
See error number 1002.
6044: Phasing: Rotational direction or position not valid
Info:
Calculated number of polepairs
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Data type:
Pagina 53 di 164
REAL
Description:
Runtime error during phasing CMD_PHASING in stepper mode (PHASING_MODE=1).
Reaction:
Phasing is aborted.
Cause/Remedy:
Info shows the negative number of polepairs:
- Motor wiring error: Motor phase permuted. -> Swap two motor phases.
- Encoder position or speed contains an error: See error number 4014.
Info shows a value in the range -0.5..0.5:
- Encoder scaling SCALE_ENCODx_INCR is incorrect
- Encoder position or speed contains an error: See error number 4014.
- Motor wiring error: Motor phase not connected to the plug X4. -> Check the motor movement during the
phasing. The motor should move 10 polepairs.
- Load torque active. -> Check the motor movement during the phasing. The motor should move 10
polepairs.
- Motor holding brake do not open. -> Check the motor movement during the phasing. The motor should
move 10 polepairs.
6045: Wiring: At least one motor phase is disconnected
Info:
Data type:
Description:
Runtime error during phasing (CMD_PHASING=ncSTART) in stepper mode (PHASING_MODE=1) if the
actual stator current of the quadrature component ICTRL_ISQ_ACT is below the limit (0.5*PHASING_CURR)
during the 'phasing'.
Reaction:
Phasing is aborted.
Cause/Remedy:
Motor wiring error:
- At least two motor phases are disconnected, loose terminal. -> Check if all three phase-phase
impedances (Zu-v, Uv-w and Zw-u) are the same on the X5 motor terminal. Caution: Observe safety
regulations!
Motor defect:
Winding break, plug defect
-> Check if all three phase-phase impedances (Zu-v, Uv-w and Zw-u) are the same on the motor plug
(motor terminal).
Current controller configuration error:
-> Check the actual stator current of the quadrature component ICTRL_ISQ_ACT during the 'phasing'.
ACOPOS servo drive defect:
-> Check if the orange Run-LED is lit during the 'phasing'.
-> Check the actual stator current of the quadrature component ICTRL_ISQ_ACT during the 'phasing'
before and after switching the ACOPOS servo drive.
6046: Phasing: No rotor movement
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 54 di 164
Info:
Data type:
Description:
Runtime error during phasing (CMD_PHASING=ncSTART) in dither mode (PHASING_MODE=2). Speed
SCTRL_SPEED_ACT is too low during the 'phasing'.
Reaction:
Phasing is aborted.
Cause/Remedy:
Rotor blocked:
- Motor with holding brake, blocked due to external load, motor with very high moment of inertia. -> Check
the speed SCTRL_SPEED_ACT during the 'phasing'.
Incorrect motor configuration:
- No torque is created when the phasing current PHASING_CURR is too low. -> Check the speed
SCTRL_SPEED_ACT during the 'phasing'.
Encoder position or speed contains an error: See error number 4014.
Motor wiring error: At least two motor phases are disconnected, loose terminal. See error number 6045.
6047: Holding brake: Control signal off and output status on
Info:
Data type:
Description:
Runtime error during holding brake control monitor is active. The holding brake was supplied 500ms with
current and voltage while the holding brake gating signal was off.
Reaction:
See error number 6029.
But if the position control is active (CONTROLLER_MODE=1 or 3): Movement stopped with the axis limits
and switching off the controller after the error removed.
Cause/Remedy:
ACOPOS defective (Holding brake control, signal level monitoring, internal relay)
6048: Motor holding brake monitor: Position error too large
Info:
Data type:
Description:
Runtime error during the stop monitoring of the holding brake. The actual position of the motor encoder
has exceeded the position error limit BRAKE_TEST_POS_LIM while the holding brake was closed. The
holding brake wear out more quickly.
Reaction:
If the functional test of the holding brake torque is active: Test is aborted.
Otherwise: None.
Cause/Remedy:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 55 di 164
Error in the configuration of the holding brake (Delay time for closing the holding brake too small).
Error in the configuration of the motor encoder.
Position error limit too small (Clearance and elastic deformation between holding brake and motor encoder
must be considered).
Load torque too large.
Holding brake defective.
No drive controlled movement halt.
Additionally during functional test of the holding brake torque:
Test torque or holding brake rated torque too large.
Load torque determination incorrect (Current measuring system, motor configuration, rotor commutation or
motor encoder measuring system).
Controller instable.
If the holding brake torque test is not active, then the stop monitoring can be deactivated by setting
BRAKE_MODE Bit3 = 1.
7012: Encoder: Hiperface error bit
Info:
Slot
Data type:
USINT
Description:
Runtime error in a Hiperface encoder while reading or writing a parameter. An error occurred when
transferring data between Hiperface encoder and AC121 plug-in card. As a result, the error bit was set.
This error bit is set due to commands which cannot be processed (protocol error, command arguments) or
due to internal encoder errors.
Reaction:
Error number 7013 is entered.
Cause/Remedy:
See additionally entered error numbers.
7013: Encoder: Status message
Info:
Status code
Data type:
USINT
Description:
Runtime error in a Hiperface encoder while reading or writing a parameter. The present encoder status is
requested due to an error bit entry during a data transfer between Hiperface encoder and AC121 plug-in
card. This should provide an answer about the cause of error.
Reaction:
If the error bit has not been set, the Hiperface status message is read and error number 7013 is entered.
Cause/Remedy:
Description of the encoder status according to Stegmann:
00h...The encoder has not detected an error
Initialization error:
01h...Analog signal outside specification
02h...Internal angular offset incorrect
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 56 di 164
03h...Data field partition table destroyed
04h...Analog limiting values unavailable
05h...Internal I2C bus unserviceable
06h...Internal checksum error
Protocol error:
07h...Encoder reset from program monitoring
09h...Parity error
0Ah...Checksum of the data transmitted is incorrect
0Bh...Unknown command code
0Ch...Number of data items transmitted is incorrect
0Dh...Command argument transmitted is impermissible
Data error:
0Eh...The selected data field must not be written to
0Fh...Incorrect access code
10h...The size of the specified data field cannot be changed
11h...Specified word address outside data field
12h...Access to nonexistent data field
Position error:
01h...Analog signal outside specification
1Fh...Speed too high, no position formation possible
20h...Impermissible single-turn position
21h...Multi-turn position error
22h...Multi-turn position error
23h...Multi-turn position error
Other errors:
1Ch...Monitoring the magnitude of the analog signals (process data)
1Dh...Critical encoder current (contamination, transmitter breakdown)
1Eh...Critical encoder temperature
08h...Current overflow
7014: Encoder: CRC error during parameter transfer
Info:
Slot
Data type:
USINT
Description:
Runtime error in an encoder with activated monitor (activation, see error number 7030). A CDC error
occurred during the data transfer.
Reaction:
The transfer is repeated during the encoder initialization.
The transfer is aborted while writing the parameter.
Cause/Remedy:
Encoder voltage dip (Check the ACOPOS 24VDC supply when power is supplied via plug-in cards).
Encoder defective.
SSI encoder connection is interrupted or defective. See wiring guidelines error number 7030.
AC120 or AC121 plug-in card defect.
7015: Encoder: Timeout error during parameter transfer
Info:
Slot
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Data type:
Pagina 57 di 164
USINT
Description:
Runtime error in an encoder with activated monitor (activation, see error number 7030). A timeout error
occurred during the data transfer. The encoder did not send an answer to a send request.
Reaction:
The transfer is repeated during the encoder initialization.
The transfer is aborted while writing the parameter.
Cause/Remedy:
Encoder is not connected.
See also error number 7014.
7016: Encoder: Busy error during parameter transfer
Info:
Slot
Data type:
USINT
Description:
Runtime error in an encoder with activated monitor (activation, see error number 7030). The data transfer
could not be started because the previous transfer was not completed.
Reaction:
The transfer is repeated during the encoder initialization.
The transfer is aborted while writing the parameter.
Cause/Remedy:
Operating system error.
7017: Encoder: Error while reading encoder parameter
Info:
Slot
Data type:
USINT
Description:
Runtime error in an encoder with activated monitor (activation, see error number 7030). The encoder data
contains errors or is not supported.
Reaction:
See error number 7030.
Cause/Remedy:
EnDat encoder:
Error in the checksum of the encoder data.
Hiperface encoder:
Encoder type not supported.
7020: OEM data: Data write error
Info:
Slot
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Data type:
Pagina 58 di 164
USINT
Description:
Runtime error in an encoder while writing the OEM data. Errors occurred during the serial transfer.
Reaction:
The write procedure is aborted.
Cause/Remedy:
See additionally entered error numbers.
7021: Encoder: Timeout error while reading absolute position
Info:
Slot
Data type:
USINT
Description:
Runtime error in an encoder with activated monitor (activation, see error number 7030). A timeout error
occurred while reading the absolute serial position. The encoder did not send an answer to a send request.
Reaction:
The transfer is repeated.
Cause/Remedy:
See error number 7014.
7022: Encoder: Initialization is active
Info:
Slot
Data type:
USINT
Description:
Runtime error in an encoder with activated monitor (activation, see error number 7030). The encoder
initialization is not complete.
Reaction:
Write command motor data, read/write PROM data, etc is not executed.
See also error number 7030.
Cause/Remedy:
Encoder is not connected.
Encoder defective.
Encoder initialization is active due to AB signal failure.
Serial communication error (see additionally entered error numbers).
7023: Encoder: Parameter transfer is active
Info:
Slot
Data type:
USINT
Description:
Response error while reading/writing encoder OEM data. A read/write access to the encoder OEM data was
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 59 di 164
already activated and is not yet complete.
Reaction:
The command is not executed.
Cause/Remedy:
The interval between two read/write accesses was too short.
Serial communication error (see additionally entered error numbers).
7029: Encoder: Incremental signal amplitude too small
Info:
Slot
Data type:
USINT
Description:
Runtime error in an encoder with activated monitor (activation, see error number 7030). The amplitude of
the sinusoidal AB signals is smaller than 17.5% (AC120) or 20.0% (AC121) of the maximum amplitude
which can be displayed (see ACOPOS user's manual).
Reaction:
See error number 7030.
Cause/Remedy:
No encoder supply or supply contains an error.
See also error number 7030.
7030: Encoder: Incremental signal amplitude too large
Info:
Slot
Data type:
USINT
Description:
Runtime error in an encoder with activated monitor.
The monitor is activated with the following configurations:
- Homing the encoder position (CMD_HOMING, CMD_ENCOD2_HOMING, CMD_ENCOD3_HOMING).
- Encoder position used for drive control (VCTRL_S_ACT_PARID, PCTRL_S_ACT_PARID).
- Switch on the drive control (CMD_CONTROLLER). See also error number 4005.
- Encoder position used for cam profile linkage (CAM_MA_AXIS).
- Encoder position used for cam automat (AUT_MA_AXIS, AUT_MA_AXIS_VAX1, AUT_MA_ADD_AXIS,
AUT_MA_ADD_AXIS_VAX1, AUT_SL_ADD_AXIS, AUT_SL_ADD_AXIS_VAX1).
- Encoder position used for drum sequencer (DRUMSEQ_MA_AXIS).
- Encoder position used for network coupling (MA1/2/3_CYCLIC_SEND).
- Encoder position used for encoder emulation output value (ENCOD2/3_OUT_PARID).
- Encoder position used for Latch (LATCH1/2_VALUE_PARID).
- Encoder position used for cyclic set value input (CYC_ABS_MOVE_PARID).
- Encoder position used for FUB Pointer parameter ID (e.g. PID_IN_PARID etc).
The amplitude of the sinusoidal AB signals is larger than 99% of the maximum amplitude which can be
displayed (see ACOPOS user's manual).
Reaction:
'Switch on controller' command: See error number 4005.
'Homing' command: See error number 5034.
Other commands: The command is not executed.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 60 di 164
When controller is active:
Position and motor encoder with synchronous motor: Movement stopped with short-circuit braking and by
switching off the controller.
Position and motor encoder with asynchronous motor: Movement stopped with short-circuit braking and by
switching off the controller.
Position encoder of an active two-encoder position controller: See error number 4007.
Data connections:
Encoder for network coupling: See error number 1008.
Encoder for cam automat: See error number 5111.
Status:
Position or motor encoder: The 'controller ready' state is reset.
The 'homing position valid' state is reset.
The 'commutation valid' state is reset.
Cause/Remedy:
No encoder supply or supply contains an error.
Sense +5V or Sense COM is not connected.
AB signal level of the encoder does not meet the specification of the plug-in card (check encoder data
sheet).
AB encoder connection is interrupted or defective. Check wiring guidelines.
Encoder read head is not adjusted.
Encoder read head mounting tolerances are too large throughout the movement area.
Encoder measure is no longer clean.
Encoder is not connected.
Encoder defective.
AC120 or AC121 plug-in card defect.
Wiring guidelines:
1. Check open line, line termination, loose contacts and wiring errors
2. Check the periodic occurences of disturbances. Inductive switching elements such as contactors or relays
are to be equipped with corresponding suppressor elements such as varistors, RC elements or damping
diodes.
3. To prevent the effects of disturbances motor lines, encoder lines, controller lines, and data lines must be
properly shielded.
4. All electrical connections are to be kept as short as possible.
5. On all plug-in cards, the two screws used to fasten the module must be tightened so that the mounting
bracket is connected to ground.
6. Shielded cables with copper mesh or tinned copper mesh are to be used. Twisting or extending the
protective mesh using single conductors is not allowed. Unused cable conductors are to be grounded on
both sides if possible.
7. The cable shield must be attached to the shield connector. Cable shields are to be attached to the
designated shield terminals and the plug housing.
8.1. Cable connection via DSUB plug: The cable shield must be connected using the designated clamp in
the metallic or metal plated plug housing. The fastening screws must be tightened.
8.2. Cable connection via terminals: The cable shield must be attached to the shield connection terminal.
8.3. Cable connection via RJ45 plug: Grounding the cable shield as well provides an improvement in EMC
properties. Both sides should be properly grounded near the connector.
9. On the motor side, the encoder cable shield is connected to the motor housing using the encoder plug
and connected to ground via the machine. Unplug the encoder cable on the module side. Measure the
resistor between cable shield (DSUB Plug housing) to ground (ground connection in the switch cabinet).
The resistor may not exceed 0.2 Ohm.
10. The cable shield for the motor line or the connection cable for the external braking resistor is connected
with the housing of the ACOPOS via the grounding plate using the grounding clamp provided.
11. On the motor side, the cable shield of the motor line is connected to the motor housing using the motor
plug and connected to ground via the machine. The cable shield on the connection cable for the external
braking resistor must be connected with the housing of the braking resistor.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 61 di 164
7031: Encoder: Incremental signal amplitude too large (Disturbance)
Info:
Slot
Data type:
USINT
Description:
Runtime error in an encoder with activated monitor (activation, see error number 7030). The amplitude of
the sinusoidal AB signals is larger than 100% of the maximum amplitude which can be displayed (see
ACOPOS user's manual)
Reaction:
See error number 7030.
Cause/Remedy:
See also error number 7030.
7032: Encoder: Incremental signal amplitude too small (Disturbance, no
connection)
Info:
Slot
Data type:
USINT
Description:
Runtime error in an encoder with activated monitor (activation, see error number 7030). The amplitude of
the sinusoidal AB signals is smaller than 10% of the maximum amplitude which can be displayed (see
ACOPOS user's manual) -> Encoder is not recognized by the ACOPOS servo drive.
Reaction:
The internal status 'positions synchronous' is reset.
See also error number 7029.
Cause/Remedy:
No encoder supply or supply contains an error.
See also error number 7029.
7036: Encoder: Interface ID invalid (Check slot and Interface EEPROM data)
Info:
Slot
Data type:
USINT
Description:
Runtime error in an encoder with activated monitor (activation, see error number 7030). The encoder is not
supported by the drive.
Reaction:
See error number 7030.
Cause/Remedy:
A plug-in card is not inserted in the slot assigned to the encoder.
A plug-in card which does not support encoders is inserted in the slot assigned to the encoder.
An invalid plug-in card ID was read due to hardware error. (plug-in card, PROM data, SSI interface, bus
board, module plug, etc.)
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 62 di 164
7038: Encoder: Position value not synchronous with absolute value
Info:
Slot
Data type:
USINT
Description:
Runtime error in an absolute encoder with activated monitor (activation, see error number 7030). The
incremental position of the plug-in card could not be synchronized with the absolute serial position of the
encoder.
Reaction:
See error number 7030.
Cause/Remedy:
Serial communication error (see additionally entered error numbers).
Incremental signal error (see additionally entered error numbers).
7039: Incremental encoder: Cable disturbance track A
Info:
Slot
Data type:
USINT
Description:
Runtime error in an incremental encoder with activated monitor (activation, see error number 7030).
Signal A and nA must complement each other. Overlapping only occurs in the area of the switching edges.
A cable disturbance is registered if the low or high level overlap for a long period of time.
Reaction:
See error number 7030.
Cause/Remedy:
Encoder is not connected.
No encoder supply or supply contains an error.
Encoder connection is interrupted or defective. See wiring guidelines error number 7030.
Signal level of the encoder does not meet the specifications of the plug-in card (check encoder data sheet).
Encoder defective.
AC123 plug-in card defective.
7040: Incremental encoder: Cable disturbance track B
Info:
Slot
Data type:
USINT
Description:
Runtime error in an incremental encoder with activated monitor (activation, see error number 7030).
Signals B and nB do not complement each other.
See error number 7039.
Reaction:
See error number 7030.
Cause/Remedy:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 63 di 164
See error number 7039.
7041: Incremental encoder: Cable disturbance track R
Info:
Slot
Data type:
USINT
Description:
Runtime error in an incremental encoder with activated monitor (activation, see error number 7030).
Signals R and nR do not complement each other.
See error number 7039.
Reaction:
See error number 7030.
Cause/Remedy:
See error number 7039.
If the encoder does not support reference pulses and they are not necessary, then the reference pulse
monitor can be deactivated by setting bit 1 of ENCODX_LINE_CHK_IGNORE.
7042: Incremental encoder: Edge distance of quadrature signal too small
Info:
Slot
Data type:
USINT
Description:
Runtime error in an incremental encoder with activated monitor (activation, see error number 7030). Each
edge of the quadrature signal (A/B incremental encoder signals) is evaluated. The limit value for the time
interval between two edges was not reached.
Reaction:
See error number 7030.
Cause/Remedy:
Encoder speed too high.
Encoder connection is interrupted or defective. See wiring guidelines error number 7030.
Encoder vibrations.
Encoder defective.
AC123 plug-in card defective.
7043: Encoder: Cable disturbance track D
Info:
Slot
Data type:
USINT
Description:
Runtime error in a SSI encoder with activated monitor (activation, see error number 7030). Signals D and
nD do not complement each other.
See error number 7039.
Reaction:
See error number 7030.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 64 di 164
Cause/Remedy:
See error number 7039.
7044: Encoder: Parity
Info:
Slot
Data type:
USINT
Description:
Runtime error in an encoder with activated monitor (activation, see error number 7030). The transferred
parity bit does not match the determined parity bit. The determined parity bit results from the LSB of the
sum of the read data bits and the defined PARITY_MODE.
Reaction:
See error number 7030.
Cause/Remedy:
The configuration of the PARITY_MODE parameter does not correspond to the encoder specifications (check
encoder data sheet).
Encoder connection is interrupted or defective. See wiring guidelines error number 7030.
Encoder defective.
AC123 plug-in card defective.
7045: Resolver: Signal disturbance (plausibility check)
Info:
Slot
Data type:
USINT
Description:
Runtime error in a resolver with activated monitor (activation, see error number 7030). The determined
acceleration of the resolver position is larger than the maximum acceleration allowed ENCODX_A_LIM.
Reaction:
See error number 7030.
Cause/Remedy:
Configuration of the maximum acceleration ENCODX_A_LIM is too restrictive.
Resolver connection is interrupted or defective. See wiring guidelines error number 7030.
Resolver does not meet the specifications of the AC122 plug-in card.
Resolver is not connected.
Resolver defective.
AC122 plug-in card defective.
7046: Resolver: Cable disturbance
Info:
Slot
Data type:
USINT
Description:
Runtime error in a resolver with activated monitor (activation, see error number 7030). A vector
comparison is made between the sine/cosine signals in the resolver evaluation circuit. An error is output if
deviations are too large. Correct functioning of the monitor depends greatly on the input impedance and
the voltage ratio of the resolver.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 65 di 164
Reaction:
See error number 7030.
Cause/Remedy:
See error number 7045.
If the resolver does not meet the specifications of the AC122 plug-in card, the monitor of the cable
disturbances can be deactivated by setting bit 0 of ENCODX_LINE_CHK_IGNORE.
Caution: This can cause uncontrolled movements when 'real' resolver errors occur.
This error is not supported by 8AC122.60-1 plug-in cards.
7047: Invalid distance of reference marks
Info:
Distance
Data type:
DINT
Description:
Runtime error while referencing with distance-coded reference marks. The distance between two reference
marks is 0 or is larger than the general distance for reference marks ENCODX_REF_DCM_DISTANCE.
Reaction:
See error number 5035.
Cause/Remedy:
The configured general distance does not match the general distance for reference marks of the encoder
(check encoder data sheet).
Reference signal encoder connection is interrupted or defective (see wiring guidelines error number 7030).
Encoder does not support reference marks (check encoder data sheet).
Encoder reference signal does not meet the specifications of the plug-in card (check encoder data sheet).
Encoder measure is no longer clean.
Encoder defective.
AC120, AC123 or AC130 plug-in card defect.
7048: Error during the reading of encoder memory
Info:
Slot
Data type:
USINT
Description:
Runtime error in an encoder with activated monitor (activation, see error number 7030). During reading
the encoder memory too many data transfer errors occurred.
Reaction:
The encoder initialization is aborted.
See error number 7030.
Cause/Remedy:
The encoder error can be cleared only by SW reset.
See also error number 7015.
7100: Parameter function not supported. (Module ?)
Info:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 66 di 164
Data type:
Description:
Response error while writing a parameter specific to the plug-in card. The addressed plug-in card does not
support the parameter.
Reaction:
Parameter is not set.
Cause/Remedy:
The slot addressed by the parameter contains either no plug-in card or the wrong plug-in card.
See also error number 1002.
7200: DC bus: Overvoltage
Info:
Data type:
Description:
Runtime error when controller is active. The analog DC bus voltage monitor is registering that the cut-off
voltage has been exceeded.
8Vxxxx.00-x approximately 900VDC
8Vxxxx.50-x approximately 450VDC
Reaction:
See error number 6019.
Cause/Remedy:
Braking resistor not active:
In generator operation, check if the recorded DC bus voltage (UDC_ACT) does not level off when the
switch-on voltage of the braking resistor (UDC_ACT > UDC_BLEEDER_ON) is exceeded.
- Control of the braking resistor is defective. -> Switch the ACOPOS servo drive
- Relay bleeder (intern/extern) is defective. -> Switch the ACOPOS servo drive
- Fuse for external braking resistor is defective. -> Check or switch the fuse
- Internal or external braking resistor is defective or is not connected. -> Switch the ACOPOS servo drive or
the braking resistor. Measure the braking resistor on the ACOPOS servo drive X6 terminal and compare
with the data sheet. -> Check the wiring of the external braking resistor. Caution: Observe safety
regulations.
Recovery power limiter:
- switched off. -> Check if PLIM_MODE is set to 0.
- Incorrect configuration: Resistance of the external braking resistor R_BLEEDER_EXT is too high or stator
resistance MOTOR_STATOR_RESISTANCE is too low.
Mains disturbance:
- Supply voltage or DC bus voltage is too high. -> Check the DC bus voltage.
7210: DC bus: Voltage unstable
Info:
Data type:
Description:
Runtime error using the 'switch on controller' command. A valid nominal DC bus voltage UDC_NOMINAL
could not be detected. The loading relay is open.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 67 di 164
Reaction:
The 'controller ready' state is reset. See error number 4005.
Cause/Remedy:
Mains disturbance:
- Operation at the limits. The filtered DC bus voltage UDC_FILTER sporadically exceeds the cut-off voltage
UDC_BLEEDER_ON - 23.3 VDC or sporadically sinks below the minimum cut-off voltage 0.9*MAX
(UDC_NOMINAL, 400*SQRT(2))VDC.
- Large DC bus voltage fluctuation. -> Check the filtered DC bus voltage UDC_FILTER.
7211: DC bus: Voltage drop - check the power line
Info:
Low voltage limit
Data type:
REAL
Description:
Runtime error when controller is active. A mains phase failure (STAT_UDC_MON=16) is detected or the DC
bus voltage UDC_ACT sinks below the cut-off voltage 0.779 * UDC_NOMINAL.
Reaction:
See error number 1011.
The under-voltage limiter is switched on during the movement stop.
Cause/Remedy:
Mains disturbance:
- Brief mains or phase failure. -> Check phase voltages and DC bus voltage for brief dips during operation.
Mains wiring error or overloaded mains:
- High supply impedance, saturation effect of the mains transformer. -> Check if the envelope of the DC
bus voltage UDC_ACT or the phase voltage in motor operation is reduced by more than 10%.
- Loose contact or mains phase not attached. See error number 7215.
- Mains phase failure. See error number 7215.
Single-phase mains operation:
- The DC bus voltage UDC_ACT cannot be sufficiently supported when the motor load is too high.
- Nominal voltage detection problem: -> Compare the measure nominal DC bus voltage UDC_NOMINAL
with the DC bus voltage UDC_ACT or multimeter.
- Nominal voltage initialization problem: -> Compare the nominal DC bus voltage UDC_NOMINAL with the
DC bus voltage UDC_ACT or multimeter.
7212: DC bus: Voltage drop - Emergency-Stop interrupted
Info:
Low voltage limit
Data type:
REAL
Description:
Runtime error: During the movement stop with under-voltage limiter (see error number 7211) the DC bus
voltage can no longer be maintained above 0.65 * UDC_NOMINAL.
Reaction:
See error number 6021.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 68 di 164
Cause/Remedy:
Recovery power too low: Following a power failure, the recovery power in the DC bus network is lower than
the power loss of the DC bus network. -> Check the power balance.
7214: DC bus: Charging resistor hot (too many power line fails)
Info:
Data type:
Description:
Runtime error if the DC bus is loaded at least two times within 20 seconds with the following ACOPOS servo
drives:
8V1022.00-1
8V1045.00-1
8V1090.00-1
8V1022.00-2 from Rev.:A0 up to and including Rev.:F0
8V1045.00-2 from Rev.:A0 up to and including Rev.:F0
8V1090.00-2 from Rev.:A0 up to and including Rev.:F0
The charging resistor can be damaged if the intervals for switching on the mains are shorter than 20s.
Reaction:
See error number 7210.
Cause/Remedy:
Short intervals for switching on the mains (< 20s) must be prevented in the application.
7215: DC bus: At least one phase of the power line failed
Info:
Data type:
Description:
Runtime error. At least one mains phase failed.
The following ACOPOS servo drives do not have phase failure monitoring:
8V1022.00-1
8V1045.00-1
8V1090.00-1
8V1022.00-2 from Rev.:A0 up to and including Rev.:F0
8V1045.00-2 from Rev.:A0 up to and including Rev.:F0
8V1090.00-2 from Rev.:A0 up to and including Rev.:F0
Reaction:
See error number 7211.
Cause/Remedy:
Mains wiring error: Loose contact or mains phase not attached. -> Check wiring and voltages (Uu-v, Uv-w
and Uw-u) on the X3 plug.
Mains phase failure: Check the contactor, fuse, transformer and supply voltage.
DC bus feed or single-phase operation: If the ACOPOS servo drive is supplied by the DC bus or singlephase, then the phase monitor must be ignored (PHASE_MON_IGNORE=1). Caution: These operating
modes are only conditionally permissible.
7217: DC bus: Voltage too high - Check power supply
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Info:
Maximum DC bus voltage
Data type:
REAL
Pagina 69 di 164
Description:
Runtime error using the 'switch on controller' command. The filtered DC bus voltage UDC_FILTER is higher
than the cut-off voltage UDC_BLEEDER_ON-23.3 VDC.
Reaction:
See error number 7210.
Cause/Remedy:
Invalid mains: Supply voltage or DC bus voltage is too high. -> Check the DC bus voltage.
Incorrect configuration of over-voltage limiter: UDC_BLEEDER_ON too low.
7218: DC bus: Voltage too low - Nominal voltage detection not possible
Info:
Minimum required DC bus voltage
Data type:
REAL
Description:
Runtime error using the 'switch on controller' command. The filtered DC bus voltage UDC_FILTER is lower
than the cut-off voltage 0.9*UDC_DETECTION.
Reaction:
See error number 7210.
Cause/Remedy:
Invalid mains: Supply voltage or DC bus voltage is too low. -> Check the DC bus voltage.
Incorrect configuration of the nominal voltage detection: UDC_DETECTION too high.
7219: DC bus: Voltage too low - Check power supply
Info:
Minimum required DC bus voltage
Data type:
REAL
Description:
Runtime error using the 'switch on controller' command. The filtered DC bus voltage UDC_FILTER is lower
than the cut-off voltage 0.9*UDC_NOMINAL.
Reaction:
See error number 7210.
Cause/Remedy:
Invalid mains: Supply voltage or DC bus voltage is too low. -> Check the DC bus voltage.
Incorrect configuration of the nominal voltage initialization: UDC_NOMINAL too high.
7220: Nominal voltage detection: Voltage not allowed
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Info:
DC bus voltage
Data type:
REAL
Pagina 70 di 164
Description:
Runtime error using the 'switch-on controller' command, in ACOPOS servo drives with internal DC bus
power supply (8V1180.xx-x - 8V128M.xx-x) if the filtered DC bus voltage UDC_FILTER is in the critical
range [0.9*SQRT(2)*240, SQRT(2)*380] VDC.
Reaction:
See error number 7210.
Cause/Remedy:
Invalid mains: Mains voltage or DC bus voltage is invalid. -> Check the DC bus voltage.
7300: Digital IO: IO Configuration invalid
Info:
Slot
Data type:
UINT
Description:
Response error during the input/output configuration DIO_DIR for digital IOs. A configuration was defined
which is not supported by the hardware.
Reaction:
The parameter value is not accepted.
Cause/Remedy:
When using the AC130 plug-in cards, the first 8 IOs must be configured in pairs (1/2, 3/4, 5/6, 7/8) as
inputs or outputs.
See error number 1002.
7401: Parameter position exceeds maximum data length
Info:
Data type:
Description:
Response error while writing a parameter ID for cyclic operation of a drive (CYCLIC_TORV_PARID,
CYCLIC_FRDRV_PARID).
Reaction:
The parameter ID is not accepted.
Cause/Remedy:
The parameters to drive exceed the maximum data length.
The parameters from drive in a monitor block exceed the maximum data length.
7402: Processing of parameter sequence aborted: Write error
Info:
Index of parameter
Data type:
UINT
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 71 di 164
Description:
Runtime error during initialization of a parameter sequence if the parameter sends an error at the present
index (index begins at 0).
Reaction:
The subsequent parameters in the parameter sequence are not processed. The status remains at 'not
initialized'. The parameter error is additionally entered as runtime error.
Cause/Remedy:
According to the parameter ID and the additionally entered error number.
7403: Processing of parameter sequence is still active
Info:
Data type:
Description:
Response error during download or during initialization of a parameter sequence if the parameter in this
sequence is not yet finished being processed.
Reaction:
The new download data is not accepted or the initialization is not restarted.
Cause/Remedy:
Request (delay step) for 'parameter sequence initialized' state is missing.
-> Check program sequence and status request.
7404: Parameter sequence not available at index
Info:
Data type:
Description:
Response error using the 'initialize parameter sequence' command if there is no data at the index.
Reaction:
The command is not executed.
Cause/Remedy:
Invalid parameter sequence index.
A download has not yet been performed for the index.
The download to the index was aborted earlier with an error.
8001: EEPROM select not valid
Info:
Data type:
Description:
Response error while writing the parameter EEPROM_SELECT.
Reaction:
None.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 72 di 164
Cause/Remedy:
Value of the parameter is outside of the valid range [0...5].
Caution: Internal parameter for writing the EEPROM. False usage can cause damage to the ACOPOS servo
drive.
8003: Table index not valid
Info:
Data type:
Description:
Response error while writing the SEP_ULONG_WR and SEP_FLOAT_WR parameters or while reading the
SEP_ULONG_RD and SEP_FLOAT_RD parameters.
Reaction:
None.
Cause/Remedy:
The access counter is incremented after each read and write procedure for the above parameters.
Caution: Internal parameter for writing the EEPROM. False usage can cause damage to the ACOPOS servo
drive.
8004: EEPROM variable type not valid
Info:
Data type:
Description:
Runtime error while reading from the EEPROM.
Reaction:
None.
Cause/Remedy:
Software error: ACOPOS operating system.
8005: EEPROM type not valid
Info:
Data type:
Description:
Runtime error while reading from the EEPROM.
Reaction:
See error number 8004.
Cause/Remedy:
See error number 8004.
8006: Value of EEPROM parameter is zero
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Info:
EEPROM Parameter ID
Data type:
UINT
Pagina 73 di 164
Description:
Runtime error while reading from the EEPROM.
Reaction:
None.
Cause/Remedy:
Plug-in card: EEPROM defect. -> Switch plug-in card.
ACOPOS servo drives: EEPROM defect. -> Switch the ACOPOS servo drive.
8007: Value of EEPROM parameter is not valid
Info:
EEPROM Parameter ID
Data type:
UINT
Description:
See error number 8006.
Reaction:
None.
Cause/Remedy:
See error number 8006.
8020: Invalid switch frequency
Info:
Data type:
Description:
Runtime error while reading from the EEPROM.
Reaction:
The 'controller ready' state is reset. See error number 4005.
Cause/Remedy:
ACOPOS servo drives: EEPROM defect -> Switch the ACOPOS servo drive.
9000: Heatsink temperature sensor: Overtemperature - Movement stopped
Info:
Temperature limit
Data type:
REAL
Description:
Runtime error if the temperature of the heat sink temperature sensor TEMP_HEATSINK exceeds the limit
(see INFO).
Reaction:
See error number 1011.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 74 di 164
Cause/Remedy:
Invalid operational conditions:
- Environmental temperature is higher than 40C while in operation. -> Check the cool air temperature
right after opening the intake.
- Moderate air flow in the ACOPOS servo drive. -> Check the mounting direction and the covers on the
intake opening.
ACOPOS servo drive defect:
-Cooling fan defect. -> Check if the fan makes any sound when the controller is on. The sound from the fan
is louder when the heat sink temperature is high.
- Problem with heat sink temperature measurement: -> When the controller is switched off, compare the
environmental temperature with the temperature of the heat sink temperature sensor TEMP_HEATSINK.
- If the thermal transition resistance between IGBT and the heat sink is too high, check the heat dissipation
past between the heat sink and IGBT. -> Switch the ACOPOS servo drive.
9001: Heatsink temperature sensor: Overtemperature - Limiter active
Info:
Temperature limit
Data type:
REAL
Description:
Runtime error if the temperature of the heat sink temperature sensor TEMP_HEATSINK exceeds the limit
(see INFO).
Reaction:
Synchronous motor: Movement stopped with short-circuit braking. If the current signals and voltage
signals in phase 1 and phase 2 are stationary, the regulator is switched off.
Asynchronous motor: Movement stopped with eddy-current braking. If the current signals and voltage
signals in phase 1 and phase 2 are stationary, the regulator is switched off.
The motor current is limited during the Movement stop with the motor rated current MOTOR_CURR_RATED
and the servo drive rated current ACOPOS_CURR_RATED.
Cause/Remedy:
During the movement stop (see error number 9000), the temperature of the heat sink increases.
If the movement would be stopped in already in deeper temperatures, the limit temperature (see INFO)
would not be exceeded.
9002: Heatsink temperature sensor: Not connected or destroyed
Info:
Temperature limit
Data type:
REAL
Description:
Runtime error if the measured heat sink temperature goes below the value -20C.
Reaction:
See error number 1011.
Cause/Remedy:
Invalid operational conditions:
- Environmental temperature is lower than -20C while in operation. -> Check the cool air temperature
right after opening the intake.
ACOPOS servo drive defect:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 75 di 164
- Problem with heat sink temperature measurement. -> When the controller is switched off, compare the
environmental temperature with the heat sink temperature TEMP_HEATSINK.
9003: Heatsink temperature sensor: Not connected or destroyed
Info:
Temperature limit
Data type:
REAL
Description:
Runtime error if the measured heat sink temperature exceeds the value 120C.
Reaction:
See error number 1011.
Cause/Remedy:
Invalid operational conditions:
- Environmental temperature is higher than 120C while in operation. -> Check the cool air temperature
right after opening the intake.
ACOPOS servo drive defect: Problem with heat sink temperature measurement. See error number 9002.
9010: Motor temperature sensor: Overtemperature - Movement stopped
Info:
Temperature limit
Data type:
REAL
Description:
Runtime error if the temperature of the motor temperature sensor TEMP_MOTOR exceeds the limit (see
INFO).
Reaction:
See error number 1011.
Cause/Remedy:
Invalid operational conditions:
- Environmental temperature too high. -> Check the motor specifications.
- Flange temperature too high. -> Check the motor specifications.
- Cooling is defective. -> Check any necessary air or water cooling.
Motor continuous current exceeded:
- Increased current. See error number 9030. -> Determine the medium speed and the effective value of
the motor current and compare these values with the continuous current curve (S1 operation) of the
motor.
Problem with motor temperature measurement:
- Sensor defect: -> When the controller is switched off, compare the environmental temperature with
TEMP_MOTOR.
- Defective isolation of the temperature sensor: -> Take the plug X5 and X4 off. Check the dielectric
strength between the temperature sensor wires (T+ and T-) at the plug X4. Check the dielectric strength
between the motor phases (U,V,W) and the motor cable shield at the plug X5. If a defective temperature
sensor (isolation demage) at the ACOPOS servo drive is plug on, then the ACOPOS servo drive can be
damaged.
- ACOPOS servo drive defect: -> Take the plug X5 and X4 off. Check the voltage between the contacts T+
and T- at the female plug X4. If the voltage is unequal 5V, the ACOPOS servo drive is defective.
- Disturbance: Motor temperature sensor cable missing or poorly shielded. Check motor temperature
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 76 di 164
TEMP_MOTOR for disturbance pulses.
The maximum motor temperature (=110C) is too low.
9011: Motor temperature sensor: Overtemperature - Limiter active
Info:
Temperature limit
Data type:
REAL
Description:
Runtime error if the temperature of the motor temperature sensor TEMP_MOTOR exceeds the limit (see
INFO).
Reaction:
See error number 9001
Cause/Remedy:
During the movement stop (see error number 9010), the temperature of the motor increases.
If the movement would be stopped in already in deeper temperatures, the limit temperature (see INFO)
would not be exceeded.
9012: Motor temperature sensor: Not connected or destroyed
Info:
Motor temperature
Data type:
REAL
Description:
Runtime error when using a linear thermistor if the upper resistance limit of the temperature sensor MAX
(MOTOR_TEMPSENS_PAR1, MOTOR_TEMPSENS_PAR2) is exceeded.
Runtime error when using a PTC switch if the resistance of the PTC switch exceeds 1MOhm.
Reaction:
See error number 1011.
Cause/Remedy:
Motor temperature sensor wiring error or defect: Motor temperature sensor is not connected, or there is a
loose contact. -> When the controller is switched off, compare the environmental temperature with
TEMP_MOTOR. -> Check the resistance of the motor temperature sensor on the X4 terminal for plausibility
using a multimeter.
The upper resistance limit of the linear thermistor MAX(MOTOR_TEMPSENS_PAR1,
MOTOR_TEMPSENS_PAR2) was selected too low.
Problem with the motor temperature measurement: See error number 9010.
9013: Motor temperature sensor: Short circuit
Info:
Motor temperature
Data type:
REAL
Description:
Runtime error when using a linear thermistor if the lower resistance limit of the temperature sensor MIN
(MOTOR_TEMPSENS_PAR1, MOTOR_TEMPSENS_PAR2) is not reached.
Runtime error when using a PTC switch if the resistance of the PTC switch falls below 30Ohm.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 77 di 164
Reaction:
See error number 1011.
Cause/Remedy:
Motor temperature sensor wiring error or defect: Temperature sensor short circuit. When the controller is
switched off, compare the environmental temperature with TEMP_MOTOR. -> Check the resistance of the
motor temperature sensor on the X4 terminal for plausibility using a multimeter.
The lower resistance limit of the temperature sensor MIN(MOTOR_TEMPSENS_PAR1,
MOTOR_TEMPSENS_PAR2) was selected too high.
Problem with the motor temperature measurement: See error number 9010.
9030: Junction temperature model: Overtemperature - Movement stopped
Info:
Temperature limit
Data type:
REAL
Description:
Runtime error if the temperature of the junction temperature model TEMP_JUNCTION exceeds the limit
(see INFO).
The limit depends on the ACOPOS servo drive:
8V1010.xx-x....150C
8V1016.xx-x....150C
8V1022.xx-x....125C
8V1045.xx-x....125C
8V1090.xx-x....125C
8V1180.xx-x....125C
8V1320.xx-x....125C
8V1640.xx-x....150C
8V128M.xx-x....150C
Reaction:
See error number 1011. The junction temperature limiter is switched on during the movement stop.
Cause/Remedy:
Increased current:
- Set value generation is too dynamic. Speed and acceleration are too high. See error number 5036.
- Impermissible load torque: Increased current demand due to impermissibly high load torque (friction,
jammed mechanics, aging, load thrusts).
- Set current value jump: See error number 9300.
- Incorrect controller configuration: Unstable controller.
- Motor defect: Demagnetized motor. -> Check the torque constant MOTOR_TORQ_CONST and the voltage
constant MOTOR_VOLT_CONST of the motor.
- Motor dimensioning error: -> Check the current demand for the generation of the required torque.
Generally, the torque constant MOTOR_TORQ_CONST is reduced with high currents (>
MOTOR_CURR_RATED) due to magnetic saturation.
- Incorrect motor configuration: MOTOR_COMMUT_OFFSET. -> Check the commutation offset
MOTOR_COMMUT_OFFSET with the 'phasing' command (CMD_PHASING=ncSTART) in stepper mode
(PHASING_MODE=1).
- Incorrect asynchronous motor configuration: -> Check if the magnetizing current SQRT(2)
*MOTOR_MAGNETIZING_CURR is larger than ACOPOS_CURR_RATED.
- Incorrect asynchronous motor configuration: -> Check if the magnetizing current
MOTOR_MAGNETIZING_CURR is smaller than 0.5*MOTOR_CURR_RATED.
Heat sink temperature sensor: See error number 9000.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 78 di 164
Mains disturbance or dimensioning error: Supply voltage or DC bus voltage is too high. Observe the
derating which is dependant on the DC bus voltage (see user's manual).
ACOPOS servo drive defect: DC bus voltage measurement problem. See error number 9040.
Reduced current, lowered switching frequency F_SWITCH, low DC bus voltage and good cooling of the
ACOPOS servo drive can prevent the junction from heating up.
9031: Junction temperature model: Overtemperature - Limiter active
Info:
Temperature limit
Data type:
REAL
Description:
Runtime error if the temperature of the junction temperature model TEMP_JUNCTION exceeds the limit
(see INFO).
Reaction:
See error number 9001
Cause/Remedy:
During the movement stop (see error number 9030), the temperature of the junction increases.
If the movement would be stopped in already in deeper temperatures, the limit temperature (see INFO)
would not be exceeded.
9040: Bleeder temperature model: Overtemperature - Movement stopped
Info:
Temperature limit
Data type:
REAL
Description:
Runtime error if the temperature of the braking resistor temperature model TEMP_BLEEDER exceeds the
limit (see INFO) (external -> TEMP_MAX_BLEEDER_EXT | internal -> see following list).
The limit of the internal braking resistor is dependent on the ACOPOS servo drive:
8V1010.xx-x....250C
8V1016.xx-x....250C
8V1022.xx-x....400C;
8V1045.xx-x....400C
8V1090.xx-x....400C
8V1180.xx-x....350C
8V1320.xx-x....350C
8V1640.xx-x....400C
8V128M.xx-x....400C
Reaction:
See error number 1011.
Cause/Remedy:
Recovery power increased:
-> Check the dimensioning of the braking resistor (see user's manual). The braking power is distributed on
the controllers which are switched on if DC bus's from multiple ACOPOS servo drives are linked together.
Heat sink temperature sensor: See error number 9000.
ACOPOS servo drive defect:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 79 di 164
- DC bus voltage measurement problem: -> Check the DC bus voltage UDC_ACT with a multimeter.
9041: Bleeder temperature model: Overtemperature - Limiter active
Info:
Temperature limit
Data type:
REAL
Description:
Runtime error if the temperature of braking resistor temperature model TEMP_BLEEDER exceeds the limit
(see INFO).
Reaction:
See error number 9001
Cause/Remedy:
During the movement stop (see error number 9040), the temperature of the bleeder increases.
If the movement would be stopped in already in deeper temperatures, the limit temperature (see INFO)
would not be exceeded.
9050: ACOPOS peak current: Overload - Movement stopped
Info:
Load limit
Data type:
REAL
Description:
Runtime error if the ACOPOS peak current load LOAD_PEAK_CURR exceeds the limit (see INFO). The
ACOPOS peak current load determines the ratio from effective phase current SQRT(ICTRL_ISQ_ACT^2 +
ICTRL_ISD_ACT^2)/SQRT(2) to doubled ACOPOS rated current 2*ACOPOS_CURR_RATED.
Reaction:
See error number 1011.
Cause/Remedy:
Current increased: See error number 9030.
9051: ACOPOS peak current: Overload - Limiter active
Info:
Load limit
Data type:
REAL
Description:
Runtime error if the load of the ACOPOS peak current load LOAD_PEAK_CURR exceeds the limit (see INFO).
Reaction:
See error number 9001
Cause/Remedy:
During the movement stop (see error number 9050), the load of the ACOPOS peak current increases.
If the movement would be stopped in already in deeper loads, the limit load (see INFO) would not be
exceeded.
9060: ACOPOS continuous current: Overload - Movement stopped
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Info:
Load limit
Data type:
REAL
Pagina 80 di 164
Description:
Runtime error if the ACOPOS continuous current load LOAD_CONT_CURR exceeds the limit (see INFO). The
ACOPOS continuous current load determines the ratio from effective phase current SQRT
(ICTRL_ISQ_ACT^2 + ICTRL_ISD_ACT^2)/SQRT(2) to 1.1x ACOPOS rated current
1.1*ACOPOS_CURR_RATED.
Reaction:
See error number 1011.
Cause/Remedy:
Current increased: See error number 9030.
9061: ACOPOS continuous current: Overload - Limiter active
Info:
Load limit
Data type:
REAL
Description:
Runtime error if the load of the ACOPOS continuous current load LOAD_CONT_CURR exceeds the limit (see
INFO).
Reaction:
See error number 9001
Cause/Remedy:
During the movement stop (see error number 9060), the load of the ACOPOS continuous current increases.
If the movement would be stopped in already in deeper loads, the limit load (see INFO) would not be
exceeded.
9070: Motor temperature model: Overload - Movement stopped
Info:
Load limit
Data type:
REAL
Description:
Runtime error if the load of motor temperature model LOAD_MOTOR_MODEL exceeds the limit (see INFO).
The motor temperature model determines the ratio from effective phase current SQRT(ICTRL_ISQ_ACT^2
+ ICTRL_ISD_ACT^2)/SQRT(2) to rated motor current MOTOR_CURR_RATED.
Reaction:
See error number 1011.
Cause/Remedy:
Current increased: See error number 9030.
Incorrect motor configuration:
-> Compare the motor rated current MOTOR_CURR_RATED with the motor specifications.
-> Check the den motor winding cross section MOTOR_WIND_CROSS_SECT.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 81 di 164
9071: Motor temperature model: Overload - Limiter active
Info:
Load limit
Data type:
REAL
Description:
Runtime error if the load of the motor temperature model LOAD_MOTOR_MODEL exceeds the limit (see
INFO).
Reaction:
See error number 9001
Cause/Remedy:
During the movement stop (see error number 9070), the load of the motor temperature model increases.
If the movement would be stopped in already in deeper loads, the limit load (see INFO) would not be
exceeded.
9075: ACOPOS continuous power: Overload - Movement stopped
Info:
Load limit
Data type:
REAL
Description:
Runtime error if the ACOPOS continuous power LOAD_POWER exceeds the limit (see INFO).
Reaction:
See error number 1011.
Cause/Remedy:
Current increased: See error number 9030.
9076: ACOPOS continuous power: Overload - Limiter active
Info:
Load limit
Data type:
REAL
Description:
Runtime error if the load of the ACOPOS continuous power LOAD_POWER exceeds the limit (see INFO).
Reaction:
See error number 9001
Cause/Remedy:
During the movement stop (see error number 9075), the load of the ACOPOS continuous power increases.
If the movement would be stopped in already in deeper loads, the limit load (see INFO) would not be
exceeded.
9300: Current controller: Overcurrent
Info:
Limit
Data type:
REAL
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 82 di 164
Description:
Runtime error if the maximum permissible (measurable) phase current is exceeded in phase U or phase V.
The current limit depends on the ACOPOS servo drive:
8V1010.00-2....6.4Apeak
8V1010.50-2.....16Apeak
8V1016.00-2....9.6Apeak
8V1016.50-2...26.7Apeak
8V1022.xx-x.....20Apeak
8V1045.xx-x.....40Apeak
8V1090.xx-x.....40Apeak
8V1180.xx-2.....82Apeak
8V1320.xx-2....133Apeak
8V1640.xx-x....333Apeak
8V128M.xx-x....500Apeak
Reaction:
See error number 6019.
Cause/Remedy:
Set current value jump:
A jump in the set stator current of the quadrature component ICTRL_ISQ_REF occurs due to:
- Jump in the set position or set speed: See error number 5036.
- Jump in the encoder position or speed: See error number 4014.
- Jump in the speed offset (SCTRL_ADD_SET_PARID, SCTRL_SPEED_REF, SCTRL_V_SET_UNITS)
- Jump in the load offsets (ICTRL_ADD_SET_PARID, ICTRL_ADD_TRQ)
- Jump in the load on the motor shaft (jammed mechanics, load thrusts, etc.)
The actual stator current of the quadrature component ICTRL_ISQ_ACT can fluctuate above the maximum
value as a result of a rigidly set current controller and a jump in the set stator current of the quadrature
component ICTRL_ISQ_REF to the maximum value.
Unstable current controller:
- Due to magnetic saturation, the inductance is lower at high currents. The current controller is initialized
automatically according to the motor inductance MOTOR_STATOR_INDUCTANCE. -> Check the current
controller with the maximum permissible current.
- Incorrect current controller configurations: The current controller is initialized automatically according to
the motor parameters MOTOR_STATOR_INDUCTANCE, MOTOR_ROTOR_INDUCTANCE. Check these
parameters. -> Check the overshoot behavior of the step-response on the current controller.
Motor defect: See error number 6019.
ACOPOS servo drive defect: See error number 6019.
10000: Identification parameter(s) missing
Info:
Data type:
Description:
Response error while writing the parameter PIDENT_CMD. At least one parameter, which is necessary for
the identification is missing.
Reaction:
The identification procedure is cancelled.
Cause/Remedy:
Necessary parameters
See Parameter identification: Motor
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 83 di 164
32001: Error calling CAN_xopen()
Info:
Status of CAN_xopen()
Data type:
UINT
Description:
For the operation of ACOPOS servo drives via the CAN network, the function CAN_xopen() is called for each
CAN interface defined in the NC configuration to initialize the required resources of the CAN driver. This
error number is output if an error occurs with this procedure.
Reaction:
Initialization of all ACOPOS nodes connected to this CAN interface is aborted. All corresponding NC objects
can no longer be operated.
Cause/Remedy:
Wrong interface name in the NC configuration.
Status of CAN_xopen(): See CAN library error numbers.
32002: Error defining Write COB for Broadcast Command
Info:
CAN-ID (in HB and MHB) and Status of CAN_defineCOB() (in MLB and LB)
Data type:
UDINT
Description:
For the operation of ACOPOS servo drives via the CAN network, the function CAN_defineCOB() is called for
each CAN interface specified in the NC configuration to define a Write COB with a specific CAN ID for the
broadcast command to all connected ACOPOS nodes. This error number is output if an error occurs with
this procedure.
Reaction:
Initialization of all ACOPOS nodes connected to this CAN interface is aborted. All corresponding NC objects
can no longer be operated.
Cause/Remedy:
Status of CAN_defineCOB(): See CAN library error numbers.
32003: Error defining Write COB for Parameter Read Request
Info:
CAN-ID (in HB and MHB) and Status of CAN_defineCOB() (in MLB and LB)
Data type:
UDINT
Description:
For the operation of ACOPOS servo drives via the CAN network, the function CAN_defineCOB() is called for
each ACOPOS to define a Write COB with a specific CAN ID for the Channel1 Read Request telegram. This
error number is output if an error occurs with this procedure.
Reaction:
Initialization of this ACOPOS is aborted. All corresponding NC objects can no longer be operated.
Cause/Remedy:
Status of CAN_defineCOB(): See CAN library error numbers.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 84 di 164
32004: Error defining Write COB for Parameter Write Request
Info:
CAN-ID (in HB and MHB) and Status of CAN_defineCOB() (in MLB and LB)
Data type:
UDINT
Description:
For the operation of ACOPOS servo drives via the CAN network, the function CAN_defineCOB() is called for
each ACOPOS to define a Write COB with a specific CAN ID for the Channel1 Write Request telegram. This
error number is output if an error occurs with this procedure.
Reaction:
Initialization of this ACOPOS is aborted. All corresponding NC objects can no longer be operated.
Cause/Remedy:
Status of CAN_defineCOB(): See CAN library error numbers.
32005: Error defining Read COB for Parameter Read Response
Info:
CAN-ID (in HB and MHB) and Status of CAN_defineCOB() (in MLB and LB)
Data type:
UDINT
Description:
For the operation of ACOPOS servo drives via the CAN network, the function CAN_defineCOB() is called for
each ACOPOS to define a Read COB with a specific CAN ID for the Channel1 Read Response telegram. This
error number is output if an error occurs with this procedure.
Reaction:
Initialization of this ACOPOS is aborted. All corresponding NC objects can no longer be operated.
Cause/Remedy:
Status of CAN_defineCOB(): See CAN library error numbers.
32006: Error defining Read COB for Parameter Write Response
Info:
CAN-ID (in HB and MHB) and Status of CAN_defineCOB() (in MLB and LB)
Data type:
UDINT
Description:
For the operation of ACOPOS servo drives via the CAN network, the function CAN_defineCOB() is called for
each ACOPOS to define a Read COB with a specific CAN ID for the Channel1 Write Response telegram. This
error number is output if an error occurs with this procedure.
Reaction:
Initialization of this ACOPOS is aborted. All corresponding NC objects can no longer be operated.
Cause/Remedy:
Status of CAN_defineCOB(): See CAN library error numbers.
32007: Error defining Read COB for Monitor Data from the drive
Info:
CAN-ID (in HB and MHB) and Status of CAN_defineCOB() (in MLB and LB)
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Data type:
Pagina 85 di 164
UDINT
Description:
For the operation of ACOPOS servo drives via the CAN network, the function CAN_defineCOB() is called for
each ACOPOS to define a Read COB with a specific CAN ID for the monitor data from the drive. This error
number is output if an error occurs with this procedure.
Reaction:
Initialization of this ACOPOS is aborted. All corresponding NC objects can no longer be operated.
Cause/Remedy:
Status of CAN_defineCOB(): See CAN library error numbers.
32008: Error sending Read Request (network error ?)
Info:
Status of CAN_sendCOB()
Data type:
UINT
Description:
For the operation of ACOPOS servo drives via the CAN network, the NC manager first sends a Read Request
telegram with the CAN_sendCOB() function from the PLC to the ACOPOS for reading a parameter value
from the ACOPOS. This error number is output if an error occurs with this procedure.
Reaction:
Resets the interface of the corresponding read channel.
Cause/Remedy:
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
Status of CAN_sendCOB(): See CAN library error numbers.
32009: Error sending Write Request (network error ?)
Info:
Status of CAN_sendCOB()
Data type:
UINT
Description:
For the operation of ACOPOS servo drives via the CAN network, the NC manager first sends a Write
Request telegram with the CAN_sendCOB() function from the PLC to the ACOPOS for transferring a
parameter value to the ACOPOS. This error number is output if an error occurs with this procedure.
Reaction:
Resets the interface of the corresponding write channel.
Cause/Remedy:
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
Status of CAN_sendCOB(): See CAN library error numbers.
32010: Drive not responding to Read Request (is the drive in the network ?)
Info:
Timeout [usec]
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Data type:
Pagina 86 di 164
UDINT
Description:
CAN network:
To read a parameter value from the ACOPOS, the NC manager first sends a Read Request telegram from
the PLC to the ACOPOS. This error is displayed if the NC manager did not receive the corresponding Read
Response telegramm for a specific amount of time after the Read Request telegram was successfully
transferred on the CAN bus.
Powerlink network:
To read a parameter value from the ACOPOS, the NC manager first enters a Read Request telegram in the
cyclic Powerlink frame to the ACOPOS. This error is displayed if the corresponding Read Response telegram
has not been entered in the cyclic Powerlink frame from the ACOPOS after a specific amount of time.
Note:
The INFO is displayed from V1.142 on.
Reaction:
Resets the interface of the corresponding read channel.
Cause/Remedy:
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
See also error number 1012.
32011: Drive not responding to Write Request (is the drive in the network ?)
Info:
Timeout [usec]
Data type:
UDINT
Description:
CAN network:
To transfer a parameter value to the ACOPOS, the NC manager first sends a Write Request telegram from
the PLC to the ACOPOS. This error is displayed if the NC manager did not receive the corresponding Read
Response telegramm for a specific amount of time after the Write Request telegram was successfully
transferred on the CAN bus.
Powerlink network:
To transfer a parameter value to the ACOPOS, the NC manager first enters a Write Request telegram in the
cyclic Powerlink frame to the ACOPOS. This error is displayed if the corresponding Write Response telegram
has not been entered in the cyclic Powerlink frame from the ACOPOS after a specific amount of time.
Note:
The INFO is displayed from V1.142 on.
Reaction:
Resets the interface of the corresponding write channel.
Cause/Remedy:
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
See also error number 1012.
32012: Error reading module description of system module
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 87 di 164
Info:
Data type:
Description:
Before transferring a system module to the ACOPOS, the NC manager was not able to read its module
description.
Reaction:
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
The corresponding data range of the system module could not be opened by the NC manager for reading.
See also error number 32018.
32013: No operating system present on the drive
Info:
Data type:
Description:
The operating system is not stored on the ACOPOS during production. It must be transferred to the
ACOPOS during setting-up the project. This error is displayed during the ACOPOS startup function if the NC
manager detects that there is no operating system on the ACOPOS.
Reaction:
The ACOPOS startup function is aborted for this ACOPOS.
Cause/Remedy:
The system module "acp10sys" was not transferred to the ACOPOS.
If the system module "acp10sys" does not exist in the project, the actual version of the ACP10 software
must then be inserted to the project again. The system module "acp10sys", which is compatible to NC
manager "acp10man", is automatically imported to the project during the NC software update.
The system module "acp10sys" must be activated and transferred to the PLC via project transfer.
32014: Operating system version on the drive not compatible with NC manager
version
Info:
Operating system version on the drive
Data type:
UINT
Description:
This error is displayed during the ACOPOS startup function if the NC manager detects that the version of
the operating system on the ACOPOS is not compatible to the version of the NC manager.
Reaction:
The ACOPOS startup function is aborted for this ACOPOS.
Cause/Remedy:
The first three places in the version number of "acp10sys" and "acp10man" are not the same.
See also error number 32013.
32015: Error creating message queue
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Info:
Status of q_create()
Data type:
UINT
Pagina 88 di 164
Description:
Reaction:
Cause/Remedy:
32016: Error sending an idle time command to the NC Manager Task
Info:
Status of q_send()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32017: Wrong boot state after start of operating system
Info:
Boot state
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32018: Invalid Parameter ID in system module
Info:
Parameter-ID
Data type:
UINT
Description:
Before transferring a system module to the ACOPOS, the NC manager reads its parameter ID from the
module description. One of the following parameter IDs must be entered at the respective memory
location:
- BRMOD_BSL: ACOPOS BsLoader
- BRMOD_NCSYS: ACOPOS operating system
Reaction:
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
The software object "acp10bsl" or "acp10sys" handled by the NC manager is not a valid NC system module.
The following system modules are available for the ACP10-SW:
- acp10bsl: ACOPOS BsLoader
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 89 di 164
- acp10sys: ACOPOS operating system
The names "acp10bsl" and "acp10sys" are reserved for these system modules and therefore cannot be
used in the project for other software objects.
See also error number 32013.
32019: Download of NC system module not allowed (the module is on the PLC)
Info:
Data type:
Description:
Two options are available for SG3 target systems for handling the ACOPOS operating system "acp10sys":
1) Store NC operating system on the PLC: No (default setting for SG3)
The software object "acp10sys" is added to the project as NC system module. It is not stored on the PLC
after being transferred from Automation Studio to the PLC. The ACOPOS operating system contained in
"acp10sys" is then transferred to the ACOPOS via the NC manager, while "acp10sys" is transferred from
Automation Studio to the PLC.
2) Store the NC operating system on the PLC: Yes
The software object "acp10sys" is added to the project as data object. It is stored on the PLC after being
transferred from Automation Studio to the PLC. The ACOPOS operating system contained in "acp10sys" is
read from the data object "acp10sys" and transferred to the ACOPOS via the NC manager, after the next
CPU restart.
This error is displayed if the NC manager detects that "acp10sys" is being transferred from Automation
Studio to the PLC as NC system module, even though an "acp10sys" data object has already been stored
on the PLC.
Reaction:
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
The first option mentioned above is currently selected in the project and the "acp10sys" data object has
been stored on the PLC.
Delete the data object "acp10sys" from the PLC or change the selection in the project to the second option
mentioned above and re-insert the ACP10 software to the project.
See also error number 32013.
32020: System module data could not be read from the drive during NC manager
INIT
Info:
Data type:
Description:
A system module should only then be transferred to the ACOPOS during the system module download
function, if it is not already present on the ACOPOS. To detect this, the NC manager reads the version data
of the system modules which are stored on the ACOPOS (ACOPOS BsLoader and ACOPOS operating
system) during the ACOPOS startup function. This error number is output if an error occurs with this
procedure. In addition, further details are also output about the error which occurred.
Reaction:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 90 di 164
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
See also error number 1012.
32021: System module data could not be read from the drive after download
Info:
Data type:
Description:
During the system module download function, the corresponding version data is read from the ACOPOS
after a system module is transferred to the ACOPOS.This error number is output if an error occurs with this
procedure. In addition, further details are also output about the error which occurred.
Reaction:
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
See also error number 1012.
32022: Error aborting data block access before download
Info:
Data type:
Description:
During the system module download function, data block transfers which were previously started are
aborted before a system module is transferred to the ACOPOS. This error number is output if an error
occurs with this procedure. In addition, further details are also output about the error which occurred.
Reaction:
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
See also error number 1012.
32023: Error reading boot state before download
Info:
Data type:
Description:
System module download is only allowed when the ACOPOS is in a certain boot state.
Therefore, during the system module download function, the boot state is read from the ACOPOS before
transferring a system module to the ACOPOS. This error number is output if an error occurs with this
procedure. In addition, further details are also output about the error which occurred.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 91 di 164
Reaction:
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
See also error number 1012.
32025: Wrong boot state after SW Reset before download
Info:
Boot state
Data type:
UINT
Description:
System module download is only allowed when the ACOPOS is in a certain boot state.
If the ACOPOS is in another boot state, the SW Reset command is sent during the system module
download function to change to this boot state before transferring a system module to the ACOPOS. The
boot state is then read once again. This error number is then output if the ACOPOS is still not in the
required boot state. In addition, further details are also output about the error which occurred.
Reaction:
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
See also error number 1012.
32026: Error during INIT of data block write access for download
Info:
Data type:
Description:
Write access to the system module data is initialized during the system module download function, before
the actual data from a system module can be transferred to the ACOPOS. This error number is output if an
error occurs with this procedure. In addition, further details are also output about the error which occurred.
Reaction:
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
See also error number 1012.
32027: Error sending data segment for download
Info:
Data type:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 92 di 164
Description:
The data from a system module is transferred to the ACOPOS in segments during the system module
download function. This error number is output if an error occurs while calling the respective send function.
In addition, further details are also provided about the error which occurred.
Reaction:
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
See also error number 1012.
32029: Response error after sending data segment for download
Info:
Data type:
Description:
The data from a system module is transferred to the ACOPOS in segments during the system module
download function. This error number is output if a response error occurs after calling the respective send
function. In addition, further details are also output about the error which occurred.
Reaction:
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
See also error number 1012.
32030: Error at command for system module burn after download
Info:
Data type:
Description:
During the system module download function, the command to burn a system module to the FPROM is sent
to the ACOPOS after that system module is transferred to the ACOPOS. This error number is output if an
error occurs with this procedure. In addition, further details are also output about the error which occurred.
Reaction:
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
See also error number 1012.
32031: Error reading status for system module burn after download
Info:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 93 di 164
Data type:
Description:
During the system module download function, the command to burn a system module to the FPROM is sent
to the ACOPOS after that system module is transferred to the ACOPOS. A corresponding status is then
read. This error number is output if an error occurs while reading this status. In addition, further details are
also output about the error which occurred.
Reaction:
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
See also error number 1012.
32032: Error while burning system module after download
Info:
Error status from burning system module
Data type:
USINT
Description:
During the system module download function, the command to burn a system module to the FPROM is sent
to the ACOPOS after that system module is transferred to the ACOPOS. A corresponding status is then
read. This error number is output if an error is displayed in this status. In addition, further details are also
output about the error which occurred.
Reaction:
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
See also error number 1012.
32033: Timeout while burning system module after download
Info:
Last status from burning system module
Data type:
USINT
Description:
During the system module download function, the command to burn a system module to the FPROM is sent
to the ACOPOS after that system module is transferred to the ACOPOS. A corresponding status is then
read. This error number is output if the timeout is reached for the system module burn procedure, before
the system module has been successfully burned to the ACOPOS. In addition, further details are also
output about the error which occurred.
Reaction:
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 94 di 164
32034: Error at SW Reset before download
Info:
Data type:
Description:
System module download is only allowed when the ACOPOS is in a certain boot state.
If the ACOPOS is in another boot state, the SW Reset command is sent during the system module
download function to change to this boot state before transferring a system module to the ACOPOS. This
error number is output if an error occurs with this procedure. In addition, further details are also output
about the error which occurred.
Reaction:
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
See also error number 1012.
32035: Error at SW Reset after download
Info:
Data type:
Description:
For certain system modules, the SW-reset command must be sent during the system module download
function after a system module is transferred to the ACOPOS. This error number is output if an error occurs
with this procedure. In addition, further details are also output about the error which occurred.
Reaction:
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
See also error number 1012.
32036: Different system module data after download
Info:
Data type:
Description:
During the system module download function, the corresponding version data is read from the ACOPOS
after a system module is transferred to the ACOPOS. This error number is output if a difference to the
transferred system module is determined. In addition, further details are also output about the error which
occurred.
Reaction:
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 95 di 164
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
See also error number 1012.
32037: Error message(s) lost because of FIFO overflow (acknowledge errors)
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32038: Error searching for INIT parameter module
Info:
Status of function MO_modul_search()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32039: Error reading INIT parameter module
Info:
Status of function MO_read()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32040: Version of INIT parameter module is not compatible to NC manager
Info:
Version of INIT parameter module
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32041: The module acp10cfg does not exist
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 96 di 164
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32042: The module acp10cfg is not an NC data module
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32043: The NC module type of the module acp10cfg is invalid
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32044: The NC module type of the module acp10cfg cannot be read
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32045: The data address in module acp10cfg cannot be read
Info:
Data type:
Description:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 97 di 164
Reaction:
Cause/Remedy:
32046: The data section of module acp10cfg is empty
Info:
Number of data section
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32047: A CAN node number in module acp10cfg is invalid
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32048: A CAN node number in module acp10cfg is used repeatedly
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32049: Trace is already active at trace start
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32050: A Trace Data Upload is already active
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 98 di 164
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32051: Invalid Trace Status for Trace Data Upload
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32052: Error using ev_send() for Trace Data Upload
Info:
Status of function ev_send()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32053: Error defining Write COB for Parameter Read Request 2
Info:
CAN-ID (in HB and MHB) and Status of CAN_defineCOB() (in MLB and LB)
Data type:
UDINT
Description:
For the operation of ACOPOS servo drives via the CAN network, the function CAN_defineCOB() is called for
each ACOPOS to define a Write COB with a specific CAN ID for the Channel2 Read Request telegram. This
error number is output if an error occurs with this procedure.
Reaction:
Initialization of this ACOPOS is aborted. All corresponding NC objects can no longer be operated.
Cause/Remedy:
Status of CAN_defineCOB(): See CAN library error numbers.
32054: Error defining Write COB for Parameter Write Request 2
Info:
CAN-ID (in HB and MHB) and Status of CAN_defineCOB() (in MLB and LB)
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Data type:
Pagina 99 di 164
UDINT
Description:
For the operation of ACOPOS servo drives via the CAN network, the function CAN_defineCOB() is called for
each ACOPOS to define a Write COB with a specific CAN ID for the Channel2 Write Request telegram. This
error number is output if an error occurs with this procedure.
Reaction:
Initialization of this ACOPOS is aborted. All corresponding NC objects can no longer be operated.
Cause/Remedy:
Status of CAN_defineCOB(): See CAN library error numbers.
32055: Error defining Read COB for Parameter Read Response 2
Info:
CAN-ID (in HB and MHB) and Status of CAN_defineCOB() (in MLB and LB)
Data type:
UDINT
Description:
For the operation of ACOPOS servo drives via the CAN network, the function CAN_defineCOB() is called for
each ACOPOS to define a Read COB with a specific CAN ID for the Channel2 Read Response telegram. This
error number is output if an error occurs with this procedure.
Reaction:
Initialization of this ACOPOS is aborted. All corresponding NC objects can no longer be operated.
Cause/Remedy:
Status of CAN_defineCOB(): See CAN library error numbers.
32056: Error defining Read COB for Parameter Write Response 2
Info:
CAN-ID (in HB and MHB) and Status of CAN_defineCOB() (in MLB and LB)
Data type:
UDINT
Description:
For the operation of ACOPOS servo drives via the CAN network, the function CAN_defineCOB() is called for
each ACOPOS to define a Read COB with a specific CAN ID for the Channel2 Write Response telegram. This
error number is output if an error occurs with this procedure.
Reaction:
Initialization of this ACOPOS is aborted. All corresponding NC objects can no longer be operated.
Cause/Remedy:
Status of CAN_defineCOB(): See CAN library error numbers.
32057: Error accessing HS task class table
Info:
Status of SS_get_entry()
Data type:
UINT
Description:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 100 di 164
Reaction:
Cause/Remedy:
32058: Error accessing task class table
Info:
Status of SS_get_entry()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32059: Parameter tk_no invalid for access to task class table
Info:
Value of tk_no
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32060: Timeout for cyclic data from drive - Indications invalid (network error ?)
Info:
Data type:
Description:
Runtime error following successfully initialized network communication between the NC manager (on the
PLC) and the ACOPOS if the NC manager did not receive any cyclic data from the ACOPOS for a specific
number of NC task cycles.
NC_TimeoutCycles, the number of NC task cycles which leads to this error, depends on the network being
used and the network properties of the ACOPOS:
TC: Task class of cyclic NC task
PL: Powerlink
CAN network:
- TC_Timeout = 2 * TC_CycleTime + TC_Tolerance
- NC_TimeoutCycles = 1 + (2*TC_Timeout) / TC_CycleTime
Powerlink network:
- NC_TimeoutCycles = 2 + (2*PL_CycleTime) / TC_CycleTime
Powerlink network for ACOPOS with "multiplexed" property:
- NC_TimeoutCycles = 2 + (2*PL_MuxCycleTime) / TC_CycleTime
Reaction:
The NC manager switches into the "Network communication not active" state for this ACOPOS. This can be
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 101 di 164
seen in the following status indicators:
- network.init = ncFALSE
- network.phase = 0
Cause/Remedy:
CAN network:
The task class cycle time or task class tolerance are defined too low for the task class of the NC manager
task.
Powerlink network:
The powerlink cycle time is defined too low.
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
See also error number 1012.
32061: Timeout sending a Read Request telegram (network error ?)
Info:
Data type:
Description:
To read a parameter value from the ACOPOS, the NC manager first sends a read-request telegram from the
PLC to the ACOPOS. This error is displayed if the NC manager detects that the corresponding CAN telegram
has not yet been transferred to the CAN bus 70ms after the corresponding CAN send function call is made.
Reaction:
Resets the interface of the corresponding CAN read channel.
Cause/Remedy:
None of the CAN nodes connected to the PLC CAN interface is active in the CAN communication so that the
CAN bus acknowledge does not occur after sending the CAN telegram.
Network connection interruption or failure of all ACOPOS devices.
See also error number 1004.
32062: Timeout sending a Write Request telegram (network error ?)
Info:
Data type:
Description:
To transfer a parameter value to the ACOPOS, the NC manager first sends a write-request telegram from
the PLC to the ACOPOS. This error is displayed if the NC manager detects that the corresponding CAN
telegram has not yet been transferred to the CAN bus 70ms after the corresponding CAN send function call
is made.
Reaction:
Resets the interface of the corresponding CAN write channel.
Cause/Remedy:
None of the CAN nodes connected to the PLC CAN interface is active in the CAN communication so that the
CAN bus acknowledge does not occur after sending the CAN telegram.
Network connection interruption or failure of all ACOPOS devices.
See also error number 1004.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 102 di 164
32063: Data address zero (set/read parameter via service interface)
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32064: Parameter with that type cannot be set with option ncDATA_TEXT
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32065: Parameter with that type cannot be read with option ncDATA_TEXT
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32066: Parameter ID zero (set/read parameter via service interface)
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32067: Parameter ID invalid (set/read parameter with option ncDATA_TEXT)
Info:
Data type:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 103 di 164
Description:
Reaction:
Cause/Remedy:
32069: The data address of the ACOPOS parameters in module acp10cfg cannot
be read
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32070: Drive for ACOPOS parameters in module acp10cfg not found
Info:
Interface index (in HB) and node number (in LB) of this drive
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32071: The ACOPOS parameters are invalid (an update of AutomationStudio is
necessary)
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32072: Wrong boot state after SW Reset
Info:
Boot state
Data type:
UINT
Description:
Reaction:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 104 di 164
Cause/Remedy:
32073: Download of NC system module: Error reading NC hardware version of
BsLoader
Info:
Data type:
Description:
System module download is only allowed if the hardware version entered in the system module is
compatible to the hardware version of the BsLoader on the ACOPOS.
This error number is output if an error occurs while reading this hardware version from the ACOPOS. In
addition, further details are also output about the error which occurred.
Reaction:
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
See also error number 1012.
32074: Incompatible NC hardware version: Download of BsLoader not possible
Info:
Version ID of NC system module (in HB) and version ID of ACOPOS (in LB)
Data type:
UINT
Description:
System module download is only allowed if the hardware version entered in the system module is
compatible to the hardware version of the BsLoader on the ACOPOS.
This error number is output if it is determined (before transferring an ACOPOS BsLoader) that the system
module to be transferred is not compatible to the hardware version of the BsLoader on the ACOPOS. In
addition, further details are also output about the error which occurred.
Reaction:
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
The ACOPOS connected to the network has a different hardware version than the one configured in the
project.
32075: Incompatible NC hardware version: Download of operating system not
possible
Info:
Version ID of NC system module (in HB) and version ID of ACOPOS (in LB)
Data type:
UINT
Description:
System module download is only allowed if the hardware version entered in the system module is
compatible to the hardware version of the BsLoader on the ACOPOS.
This error number is output if it is determined (before transferring an ACOPOS operating system) that the
system module to be transferred is not compatible to the hardware version of the BsLoader on the
ACOPOS. In addition, further details are also output about the error which occurred.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 105 di 164
Reaction:
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
The ACOPOS connected to the network has a different hardware version than the one configured in the
project.
32076: FIFO for messages with high priority to NC Manager Task is full
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32077: A Powerlink node number in module acp10cfg is invalid
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32078: A Powerlink node number in module acp10cfg is used repeatedly
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32079: With this version one CAN interface must be in module acp10cfg
Info:
Data type:
Description:
Reaction:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 106 di 164
Cause/Remedy:
32080: With this version one Powerlink interface must be in module acp10cfg
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32081: With this version only one Powerlink interface is allowed in module
acp10cfg
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32082: Module acp10cfg contains a CAN interface without any drive node
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32083: Module acp10cfg contains a Powerlink interface without any drive node
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32084: The NC configuration does not contain any ACOPOS module
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 107 di 164
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32085: Module acp10cfg invalid (AutomationStudio V2.2 or higher necessary)
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32086: With this version no CAN interface is allowed in module acp10cfg
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32087: With this version no Powerlink interface is allowed in module acp10cfg
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32088: The INIT parameter module specified in the NC Deployment Table does not
exist
Info:
Data type:
Description:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 108 di 164
Reaction:
Cause/Remedy:
32089: NC-HW-ID of INIT parameter module is not compatible to NC manager
Info:
NC-HW-ID of INIT parameter module
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32090: NC object type of INIT parameter module is not equal to NC object
Info:
NC object type of INIT parameter module
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32091: Invalid block data in INIT parameter module (data range exceeded)
Info:
Offset in data section of INIT parameter module
Data type:
UDINT
Description:
Reaction:
Cause/Remedy:
32092: Error sending a command to the NC Idle Task
Info:
Status of send function
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32093: NcManCtrl is defined repeatedly with different values
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 109 di 164
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32094: NetworkInit is defined repeatedly for ncMANAGER with different values
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32095: Value of drive group in CAN-CFG-Module higher than maximum value
Info:
Maximum value
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32096: Size of data buffer for trace data upload in module acp10cfg too small
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32097: All counts of used network interfaces in module acp10cfg are zero
Info:
Data type:
Description:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 110 di 164
Reaction:
Cause/Remedy:
32098: Version of the module acp10cfg is not compatible with NC manager
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32099: Length of data section of module acp10cfg is too small
Info:
Number of data section
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32100: Memory for NC error text management cannot be allocated
Info:
Status of SM_malloc()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32101: Error accessing NC error text module in B&R module table
Info:
Status of SS_get_entry()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32102: Version ID of error text module not equal to that of NC manager
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 111 di 164
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32103: Data section of error text module cannot be read
Info:
Number of data section
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32104: Data section of error text module is empty
Info:
Number of data section
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32105: Length of data section of error text module is too small
Info:
Number of data section
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32106: Error list of error text module not equal with that of NC manager
Info:
First invalid error number
Data type:
UINT
Description:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 112 di 164
Reaction:
Cause/Remedy:
32107: Parameter list of error text module not equal with that of NC manager
Info:
First invalid parameter ID
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32108: The last error number of error text module is not equal to 65535
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32109: The last parameter ID of error text module is not equal to 65535
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32110: Length of data section of CAN-CFG-Module cannot be read
Info:
Status of function MO_section_lng()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32111: Length of data section of CAN-CFG-Module is too small
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Info:
Expected length
Data type:
UINT
Pagina 113 di 164
Description:
Reaction:
Cause/Remedy:
32112: The data address in the CAN-CFG-Module cannot be read
Info:
Status of function MO_read()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32113: The enable code in the CAN-CFG-Module is invalid
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32114: Values not equal to zero in reserved area of CAN-CFG-Module
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32115: The basis CAN ID for WR/RD channel1 in the CAN-CFG-Module is invalid
Info:
Data type:
Description:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 114 di 164
Reaction:
Cause/Remedy:
32116: The basis CAN ID for WR/RD channel2 in the CAN-CFG-Module is invalid
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32117: The basis CAN ID for WR/RD channel3 in the CAN-CFG-Module is invalid
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32118: The basis CAN ID for monitor data in the CAN-CFG-Module is invalid
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32119: Invalid basis CAN ID for cyclic data to the drive in CAN-CFG-Module
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32120: Invalid basis CAN ID for cyclic data from the drive in CAN-CFG-Module
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 115 di 164
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32121: The CAN ID for the SYNC telegram in the CAN-CFG-Module is invalid
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32122: The CAN ID for the broadcast command in the CAN-CFG-Module is invalid
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32123: Error defining Read COB for WR2 Request (external set position mode)
Info:
CAN-ID (in HB and MHB) and Status of CAN_defineCOB() (in MLB and LB)
Data type:
UDINT
Description:
For the operation of ACOPOS servo drives via the CAN network, in the external set position mode the
function CAN_defineCOB() is called for each ACOPOS to define a Read COB with a specific CAN ID for the
Channel2 Write Request telegram. This error number is output if an error occurs with this procedure.
Reaction:
Initialization of this ACOPOS is aborted. All corresponding NC objects can no longer be operated.
Cause/Remedy:
Status of CAN_defineCOB(): See CAN library error numbers.
32124: Error defining Read COB for WR2 Response (external set position mode)
Info:
CAN-ID (in HB and MHB) and Status of CAN_defineCOB() (in MLB and LB)
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Data type:
Pagina 116 di 164
UDINT
Description:
For the operation of ACOPOS servo drives via the CAN network, in the external set position mode the
function CAN_defineCOB() is called for each ACOPOS to define a Read COB with a specific CAN ID for the
Channel2 Write Response telegram. This error number is output if an error occurs with this procedure.
Reaction:
Initialization of this ACOPOS is aborted. All corresponding NC objects can no longer be operated.
Cause/Remedy:
Status of CAN_defineCOB(): See CAN library error numbers.
32125: Error defining Read COB for RD2 Request (external set position mode)
Info:
CAN-ID (in HB and MHB) and Status of CAN_defineCOB() (in MLB and LB)
Data type:
UDINT
Description:
For the operation of ACOPOS servo drives via the CAN network, in the external set position mode the
function CAN_defineCOB() is called for each ACOPOS to define a Read COB with a specific CAN ID for the
Channel2 Read Request telegram. This error number is output if an error occurs with this procedure.
Reaction:
Initialization of this ACOPOS is aborted. All corresponding NC objects can no longer be operated.
Cause/Remedy:
Status of CAN_defineCOB(): See CAN library error numbers.
32126: Error defining Read COB for RD2 Response (external set position mode)
Info:
CAN-ID (in HB and MHB) and Status of CAN_defineCOB() (in MLB and LB)
Data type:
UDINT
Description:
For the operation of ACOPOS servo drives via the CAN network, in the external set position mode the
function CAN_defineCOB() is called for each ACOPOS to define a Read COB with a specific CAN ID for the
Channel2 Read Response telegram. This error number is output if an error occurs with this procedure.
Reaction:
Initialization of this ACOPOS is aborted. All corresponding NC objects can no longer be operated.
Cause/Remedy:
Status of CAN_defineCOB(): See CAN library error numbers.
32127: Error deleting Write COB for Broadcast Command (external set position
mode)
Info:
CAN-ID (in HB and MHB) and Status of CAN_deleteCOB() (in MLB and LB)
Data type:
UDINT
Description:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 117 di 164
For the operation of ACOPOS servo drives via the CAN network in external set position mode, the Broadcast
command is sent to all connected ACOPOS nodes from another PLC. Therefore, the Write COB (set by
default) for each CAN interface specified in the NC configuration for the Broadcast command must be
deleted using the CAN_deleteCOB() function to be able to replace it with a Read COB. This error number is
output if an error occurs with this procedure.
Reaction:
Initialization of all ACOPOS nodes connected to this CAN interface is aborted. All corresponding NC objects
can no longer be operated.
Cause/Remedy:
Status of CAN_deleteCOB(): See CAN library error numbers.
32128: Error defining Read COB for Broadcast Command (external set position
mode)
Info:
CAN-ID (in HB and MHB) and Status of CAN_defineCOB() (in MLB and LB)
Data type:
UDINT
Description:
For the operation of ACOPOS servo drives via the CAN network in external set position mode, the Broadcast
command is sent to all connected ACOPOS nodes from another PLC. Therefore, a Read COB for each CAN
interface specified in the NC configuration for the Broadcast command is defined using the CAN_defineCOB
() function with a specific CAN ID. This error number is output if an error occurs with this procedure.
Reaction:
Initialization of all ACOPOS nodes connected to this CAN interface is aborted. All corresponding NC objects
can no longer be operated.
Cause/Remedy:
Status of CAN_defineCOB(): See CAN library error numbers.
32129: Error defining Read COB for cyclic user data from drive (ext. set pos.
mode)
Info:
CAN-ID (in HB and MHB) and Status of CAN_defineCOB() (in MLB and LB)
Data type:
UDINT
Description:
For the operation of ACOPOS servo drives via the CAN network, in external set position mode the function
CAN_defineCOB() is called for each ACOPOS to define a Read COB with a specific CAN ID for the monitor
data from the drive. This error number is output if an error occurs with this procedure.
Reaction:
Initialization of this ACOPOS is aborted. All corresponding NC objects can no longer be operated.
Cause/Remedy:
Status of CAN_defineCOB(): See CAN library error numbers.
32130: This external set position mode is only allowed with one CAN interface
Info:
Count of used CAN interfaces
Data type:
UINT
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 118 di 164
Description:
This external set position mode is not allowed for the operation of ACOPOS servo drives via the CAN
network if multiple CAN interfaces are defined in the NC configuration.
Reaction:
Initialization of the NC software is aborted. No NC objects can be operated:
Cause/Remedy:
Reduce the number of CAN interfaces in the NC configuration to one or deactivate the external set position
mode.
32131: The specified NC data module does not exist
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32132: The specified module is not an NC data module
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32133: The NC module type of the specified NC data module is invalid
Info:
Requested type (in HB) and type of NC data module (in LB)
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32134: The NC module type of the specified NC data module cannot be read
Info:
Status of function MO_read()
Data type:
UINT
Description:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 119 di 164
Reaction:
Cause/Remedy:
32135: The data address of the specified NC data module cannot be read
Info:
Status of function MO_read()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32136: The Data section of the specified NC data module is empty
Info:
Number of data section
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32137: Data address of structure for a data block operation is zero
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32138: Data address zero (user data for data block operation)
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32139: Data length zero (user data for data block operation)
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 120 di 164
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32140: Data block operation: Data module name or data address must be zero
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32141: Invalid data format in a parameter sequence
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32142: ID or type of a parameter invalid in parameter sequence with text format
Info:
Index of this parameter in the parameter sequence
Data type:
UDINT
Description:
Reaction:
Cause/Remedy:
32143: Data of a parameter in a parameter sequence longer than 6 bytes
Info:
Index of this parameter in the parameter sequence
Data type:
UDINT
Description:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 121 di 164
Reaction:
Cause/Remedy:
32144: Error for an ACOPOS Parameter Table specified in the NC Deployment
Table
Info:
Index of this ACOPOS Parameter Table (name in logbook)
Data type:
UINT
Description:
Initial ACOPOS parameter tables are tables that are defined for an NC object in an NC deployment table. All
of the parameters contained in initial ACOPOS parameter tables for a certain ACOPOS module are
transferred to this ACOPOS during the function for ACOPOS startup.
This error number is output if an error occurs while processing an initial ACOPOS parameter table.
Additionally, the name of this ACOPOS parameter table is also entered in the logbook. Furthermore, an
additional error record is also output containing details about the error which occurred.
Reaction:
The transfer of initial ACOPOS parameter tables to this NC object is aborted. Processing is continued for
any other initial ACOPOS parameter table defined for other NC objects of this ACOPOS module.
Cause/Remedy:
The error described in the subsequent error record must be corrected.
32145: The ACOPOS Parameter Table does not exist
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32146: The ACOPOS Parameter Table is not an NC data module
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32147: The NC module type of the ACOPOS Parameter Table is invalid
Info:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 122 di 164
Data type:
Description:
Reaction:
Cause/Remedy:
32148: The NC module type of the ACOPOS Parameter Table cannot be read
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32149: The data address in the ACOPOS Parameter Table cannot be read
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32150: The data section of the ACOPOS Parameter Table is empty
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32151: Error initializing memory buffer for XML parser
Info:
Data type:
Description:
Reaction:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 123 di 164
Cause/Remedy:
32152: No XML elements present in an ACOPOS Parameter Table
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32153: The first XML element is invalid in the ACOPOS Parameter Table
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32154: The ACOPOS Parameter Table does not contain any ACOPOS parameters
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32155: Nesting depth for ACOPOS parameter groups exceeded
Info:
Maximum nesting depth
Data type:
UINT
Description:
Note:
The INFO is displayed from V1.181 on.
Reaction:
Cause/Remedy:
32156: ID or type of an ACOPOS parameter invalid for text conversion
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Info:
Parameter ID
Data type:
UINT
Pagina 124 di 164
Description:
Reaction:
Cause/Remedy:
32157: Length of parameter data too large for ACOPOS parameter in XML data
Info:
Parameter ID
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32158: ACOPOS parameter: An attribute is not defined (ID)
Info:
Number of this Parameter in the ACOPOS Parameter Table
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32159: ACOPOS parameter: An attribute is not defined (Value)
Info:
Number of this Parameter in the ACOPOS Parameter Table
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32160: Basis movements with mode ncTRG_STOP are not allowed for ncV_AXIS
Info:
Data type:
Description:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 125 di 164
Reaction:
Cause/Remedy:
32161: ncNC_SYS_RESTART,ncACKNOWLEDGE is not allowed
(network.init=ncFALSE)
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32162: Internal task class number wrong (from now on operation is blocked !!!)
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32163: A system module download to all drives is not possible with
SwNodeSelect
Info:
Data type:
Description:
A system module download to all ACOPOS nodes connected to the network was started. If an ACOPOS node
is active on the network, for which "SwNodeSelect" (node number selection via software) was defined, then
a system module cannot be transferred to this ACOPOS for technical reasons (node number "lost" after SW
Reset).
Reaction:
Transfer of the system module to the ACOPOS is aborted.
Cause/Remedy:
An ACOPOS node on the network is active, for which "SwNodeSelect" was defined, while "acp10sys" is
being transferred from Automation Studio to the PLC as NC system module.
This problem can only occur for SG3 target systems and only with the following setting:
- Store NC operating system to the PLC: No (default setting for SG3)
The following setting is absolutely necessary for "SwNodeSelect":
- Store NC operating system to the PLC: Yes
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 126 di 164
See also error number 32019.
See also error number 32013.
32164: The text defined with NetworkInit (global) is invalid
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32165: A CAN node number is equal to NodeNr_SwNodeSelect
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32166: Network initialization during active network initialization not allowed
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32167: The text defined with NetworkInit is invalid
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32168: NodeNr_SwNodeSelect is defined repeatedly with different values
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 127 di 164
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32169: The node number defined with NodeNr_SwNodeSelect is invalid
Info:
Node number
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32170: A data module name has to be entered for this data block operation
Info:
Subject code of NC action
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32171: Index zero is not allowed (user data for data block operation)
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32172: The specified data module name is not valid for a BR module
Info:
Status of conv_asc2brstr()
Data type:
UINT
Description:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 128 di 164
Reaction:
Cause/Remedy:
32173: Memory for data module creation cannot be allocated
Info:
Data module length
Data type:
UDINT
Description:
Reaction:
Cause/Remedy:
32174: Error with installation of data module into BR module table
Info:
Status of BrmFlushModuleMemory()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32175: Error with installation of data module into BR module table
Info:
Status of BR_install()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32177: Output text for parameter data too large for parameter list with text format
Info:
Index of this parameter in the parameter list
Data type:
UDINT
Description:
Reaction:
Cause/Remedy:
32178: This NC object is not enabled for this ACOPOS (channel number too high)
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Info:
Maximum channel number
Data type:
UINT
Pagina 129 di 164
Description:
Reaction:
Cause/Remedy:
32179: ID or type of a parameter invalid in parameter list with text format
Info:
Index of this parameter in the parameter list
Data type:
UDINT
Description:
Reaction:
Cause/Remedy:
32180: Data address of structure for a parameter list operation is zero
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32181: Data address zero (user data for parameter list operation)
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32182: Data length zero (user data for parameter list operation)
Info:
Data type:
Description:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 130 di 164
Reaction:
Cause/Remedy:
32183: Data length invalid (user data for parameter list operation)
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32184: Invalid data format in a parameter list
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32185: Data of a parameter in a parameter list longer than 6 bytes
Info:
Index of this parameter in the parameter list
Data type:
UDINT
Description:
Reaction:
Cause/Remedy:
32186: NetBasisInitNr is defined repeatedly for ncMANAGER with different values
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32187: Error for synchronization of network initialization (details in Log Book)
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 131 di 164
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32188: This NC object is defined in hardware configuration and NC Deployment
Table
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32189: Timeout for cyclic data from drive - Indications invalid (network error ?)
Info:
Timeout [usec]
Data type:
UDINT
Description:
Runtime error following successfully initialized network communication between the NC manager (on the
PLC) and the ACOPOS if the NC manager did not receive any cyclic data from the ACOPOS for a specific
amount of time.
Reaction:
The NC manager switches into the "Network communication not active" state for this ACOPOS. This can be
seen in the following status indicators:
- network.init = ncFALSE
- network.phase = 0
Cause/Remedy:
CAN network:
The task class cycle time or task class tolerance are defined too low for the task class of the NC manager
task.
Powerlink network:
The powerlink cycle time is defined too low.
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1004.
See also error number 1012.
32190: Error defining Write COB for selection of node number via software
Info:
CAN-ID (in HB and MHB) and Status of CAN_defineCOB() (in MLB and LB)
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Data type:
Pagina 132 di 164
UDINT
Description:
The "selection of node number via software" function allows the user to set the node number used for an
ACOPOS in the application via a specific software protocol instead of using the node number switch
provided on the ACOPOS hardware.
For the operation of ACOPOS servo drives via the CAN network, for this function a separate Write COB
must be defined with the function CAN_defineCOB() for each CAN interface defined in the NC configuration.
This error number is output if an error occurs with this procedure.
Reaction:
Initialization is aborted for all ACOPOS nodes which use the "Node number selection via software" function
and which are connected to this CAN interface. All corresponding NC objects can no longer be operated.
Cause/Remedy:
Status of CAN_defineCOB(): See CAN library error numbers.
32191: This parameter ID is reserved for the PLCopen MC library
Info:
Command ID (0: SERVICE, 1: PAR_LIST, 2: PAR_SEQU, 3: ACP_PAR)
Data type:
UDINT
Description:
Reaction:
Cause/Remedy:
32192: The specified data module is not an INIT Parameter module
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32193: For this NC object type no INIT parameter module is present
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32194: This function is not implemented for this NC object type
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 133 di 164
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32195: Error downloading BsLoader to ACOPOS
Info:
Node number of ACOPOS which caused the error (if not equal to zero)
Data type:
UINT
Description:
The data in the "acp10bsl" object are transferred as BsLoader to the ACOPOS by the NC manager. This
error number is output if an error occurs during this procedure. Further details are also output in additional
error records about the error which occurred.
Reaction:
Transfer of the BsLoader to the ACOPOS is aborted.
Cause/Remedy:
Error during the transfer of a BsLoader to the ACOPOS.
The exact cause can be determined from the details entered in the additional error records.
32196: Error downloading operating system to ACOPOS
Info:
Node number of ACOPOS which caused the error (if not equal to zero)
Data type:
UINT
Description:
The data in the "acp10sys" object are transferred as operating system to the ACOPOS by the NC manager.
This error number is output if an error occurs during this procedure. Further details are also output in
additional error records about the error which occurred.
Reaction:
Transfer of the operating system to the ACOPOS is aborted.
Cause/Remedy:
During the transfer of an operating system to the ACOPOS.
The exact cause can be determined from the details entered in the additional error records.
32197: Error downloading BsLoader to ACOPOS (additional info in Log Book)
Info:
Data type:
Description:
The data in the "acp10bsl" object are transferred as BsLoader to the ACOPOS by the NC manager. This
error number is output if an error occurs during this procedure. Further details are also provided in the PLC
logbook about the error which occurred.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 134 di 164
Reaction:
The ACOPOS startup function is aborted.
Cause/Remedy:
Error during the transfer of an operating system to the ACOPOS.
The exact cause can be determined from the details entered in the log book.
See also error number 32198.
32198: Error downloading operating system to ACOPOS (additional info in Log
Book)
Info:
Data type:
Description:
The data in the "acp10sys" object are transferred as operating system to the ACOPOS by the NC manager.
This error number is output if an error occurs during this procedure. Further details are also provided in the
PLC logbook about the error which occurred.
Reaction:
The ACOPOS startup function is aborted.
Cause/Remedy:
Error during the transfer of an operating system to the ACOPOS.
The exact cause can be determined from the details entered in the log book.
The log book info for the log book error numbers below contains the following details:
- 10940: ACP10 software error number (described in this document)
- 10941: ACP10 software error number (described in this document)
- 10942: Info for the error number in 10941 (or 10940, if 10941 is not provided)
- 10943: Parameter ID, for which the error occurred
- 10965: Node number of the ACOPOS, for which the error occurred
See also error number 32018.
32200: Error calling plAcycWrite() (read parameter)
Info:
Status of plAcycWrite()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32201: Error calling plAcycWrite() (write parameter)
Info:
Status of plAcycWrite()
Data type:
UINT
Description:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 135 di 164
Reaction:
Cause/Remedy:
32202: Error calling plAcycRead() (read parameter)
Info:
Status of plAcycRead()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32203: Error calling plAcycRead() (write parameter)
Info:
Status of plAcycRead()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32204: Timeout while reading par. via acyclic channel (is the drive in the
network ?)
Info:
Timeout [usec]
Data type:
UDINT
Description:
To read a parameter value from the ACOPOS, the NC manager first sends an acyclic Read Request frame
from the PLC to the ACOPOS. This error is displayed if the NC manager could not read the corresponding
acyclic Read Response frame from the ACOPOS using the Powerlink library within a specific amount of time
after the Powerlink send function call was made.
Note:
The INFO is displayed from V1.142 on.
Reaction:
Resets the interface of the corresponding acyclic Powerlink write channel.
Cause/Remedy:
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1012.
32205: Timeout while writing par. via acyclic channel (is the drive in the
network ?)
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Info:
Timeout [usec]
Data type:
UDINT
Pagina 136 di 164
Description:
To transfer a parameter value to the ACOPOS, the NC manager first sends a Write Request frame from the
PLC to the ACOPOS. This error is displayed if the NC manager could not read the corresponding acyclic
Write Response frame from the ACOPOS using the Powerlink library within a specific amount of time after
the Powerlink send function call was made.
Note:
The INFO is displayed from V1.142 on.
Reaction:
Resets the interface of the corresponding acyclic Powerlink write channel.
Cause/Remedy:
Overload, malfunction or interruption of the network connection or ACOPOS failure.
See also error number 1012.
32206: Cyclic channel: Read Request in spite of Wait for Response
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32207: Cyclic channel: Write Request in spite of Wait for Response
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32208: Error using plACTION_DEVICE_TO_BUS_NR (additional info in Log Book)
Info:
Status of plAction()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 137 di 164
32209: Error using plACTION_GET_IDENT (additional info in Log Book)
Info:
Status of plAction()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32210: Wrong interface ident when calling plState() (additional info in Log Book)
Info:
Interface ident
Data type:
UDINT
Description:
Reaction:
Cause/Remedy:
32211: Interface not available when calling plState() (additional info in Log Book)
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32212: Fatal interface error when calling plState() (additional info in Log Book)
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32213: Timeout for Powerlink interface (additional info in Log Book)
Info:
Data type:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 138 di 164
Description:
Reaction:
Cause/Remedy:
32214: Error calling plAcycOpen() (additional info in Log Book)
Info:
Status of plAcycOpen()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32215: Error calling plCECreate() (additional info in Log Book)
Info:
Status of plCECreate()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32216: Error using plACTION_GET_IF_PARAMETERS (additional info in Log
Book)
Info:
Status of plAction()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32217: Broadcast channel: Error calling plAcycWrite() (read parameter)
Info:
Status of plAcycWrite()
Data type:
UINT
Description:
Reaction:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 139 di 164
Cause/Remedy:
32218: Broadcast channel: Error calling plAcycWrite() (write parameter)
Info:
Status of plAcycWrite()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32219: Error using plACTION_GET_IF_MUXPRESCALE (additional info in Log
Book)
Info:
Status of plAction()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32220: Error using plACTION_GET_IF_CYCLE_TIME (additional info in Log Book)
Info:
Status of plAction()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32221: Error using plACTION_GET_IF_PRESCALE (additional info in Log Book)
Info:
Status of plAction()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32222: Error using plACTION_GET_STATIONFLAG (additional info in Log Book)
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Info:
Status of plAction()
Data type:
UINT
Pagina 140 di 164
Description:
Reaction:
Cause/Remedy:
32223: Error calling plGetNodeInfo() (additional info in Log Book)
Info:
Status of plGetNodeInfo()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32224: Error calling plACTION_GET_PROTOCOL_VERSION (additional info in Log
Book)
Info:
Status of plAction()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32235: Data address zero for parameter in parameter sequence
Info:
Index of this parameter in the parameter sequence
Data type:
UDINT
Description:
Reaction:
Cause/Remedy:
32236: Data address zero for parameter in parameter list
Info:
Index of this parameter in the parameter list
Data type:
UDINT
Description:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 141 di 164
Reaction:
Cause/Remedy:
32237: Channel index for ACOPOS parameters in module acp10cfg is invalid
Info:
Interface index (in HB) and node number (in LB) of this drive
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32251: NcNetCyc: Response timeout
Info:
Timeout [usec]
Data type:
UDINT
Description:
Reaction:
Cause/Remedy:
32252: NcNetCyc: Unexpected Response (invalid counter value)
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32500: The Message FIFO already exists
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32501: Error creating Message FIFO
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Info:
Status of RtkCreateFifo()
Data type:
UINT
Pagina 142 di 164
Description:
Reaction:
Cause/Remedy:
32502: The Critical Section for Command Semaphore already exists
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32503: Error creating Critical Section for Command Semaphore
Info:
Status of RtkCreateCriticalSection()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32504: The NC Manager Idle Task already exists
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32505: Error creating NC Manager Idle Task
Info:
Status of RtkCreateTask()
Data type:
UINT
Description:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 143 di 164
Reaction:
Cause/Remedy:
32506: Error reading Taskclass Cycle Time
Info:
Status of GetTaskclassCycleTime()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32507: Error reading Taskclass Tolerance
Info:
Status of GetTaskclassMaxCycleTime()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32508: Error sending an idle time command to the NC Manager Task
Info:
Status of RtkWriteFifo()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
32509: The Critical Section for Network Command Trace already exists
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32510: Error creating Critical Section for Network Command Trace
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Info:
Status of RtkCreateCriticalSection()
Data type:
UINT
Pagina 144 di 164
Description:
Reaction:
Cause/Remedy:
32511: The Critical Section for messages with high priority already exists
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
32512: Error creating Critical Section for messages with high priority
Info:
Status of RtkCreateCriticalSection()
Data type:
UINT
Description:
Reaction:
Cause/Remedy:
33000: Master cycle time is not a multiple of communication cycle time
Info:
Data type:
Description:
Response error while writing the master cycle time (SYNC_MASTERPERIOD).
The master cycle time cannot be divided by the Powerlink cycle time.
Reaction:
Values smaller than the Powerlink cycle time limit the master cycle time. All other values are accepted
immediately. Effects occur if there are external speed requirements or in the 'cyclic, external set values'
operating mode.
Cause/Remedy:
See error number 1002.
36001: Parameter limited to valid range
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 145 di 164
Info:
Data type:
Description:
Response error while writing a parameter if the value is outside the valid limits.
Reaction:
The parameter limit to a valid value and accepted.
Cause/Remedy:
See error number 1002.
36002: Total time for the position loop controller limited to prediction time
Info:
Data type:
Description:
Response error while writing the total delay time for the position controller if the value is smaller than the
prediction time.
Reaction:
The total delay time for the position controller is set to the prediction time.
Cause/Remedy:
The total delay time for the position controller is too long.
The configuration sequence is not efficient.
-> The prediction time should first be increased.
See also error number 1002.
37101: Calculated compensation distance on slave axis limited to maximum
Info:
Data type:
Description:
Runtime error when cam automats are active during the calculation of a compensation gear. The 'effective'
slave compensation path exceeds the maximum value (AUT_COMP_SL_S_MAX or CAM_SL_S_COMP_MAX).
See also error number 5101. Only registered once following a start or restart.
Reaction:
The compensation is calculated with the limit value.
As a result, the slave interval is shifted.
Cause/Remedy:
Event with the ncAT_ONCE attribute occurs mistakenly.
Slave compensation path is too long.
Slave curve period is too small.
Slave multiplication factors are too small.
37102: Calculated compensation distance on slave axis limited to minimum
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 146 di 164
Info:
Data type:
Description:
Runtime error when cam automats are active during the calculation of a compensation gear. The 'effective'
slave compensation is below the minimum value (AUT_COMP_SL_S_MIN or CAM_SL_S_COMP_MIN). See
also error number 5101. Only registered once following a start or restart.
Reaction:
The compensation is calculated with the limit value.
As a result, the slave interval is shifted.
Cause/Remedy:
Slave compensation path is too short.
Slave curve period is too large.
Slave multiplication factors are too large.
See also error number 37101.
37103: Slave trigger outside of window
Info:
Data type:
Description:
Runtime error when cam automat is active (CMD_CAM_START) if a slave trigger is reached outside the
valid window position (CAM_SL_TRIG_WINDOW).
Reaction:
No effect when 'real' false trigger occurs.
If a label trigger is rejected, the expected value is still set to the slave interval defined in the parameter.
This could result in a deviation.
Cause/Remedy:
Window defined too small.
The first trigger reached was false or label tape not correctly setup before the start.
The defined slave interval (CAM_SL_S_SYNC + CAM_SL_S_COMP) deviates too strongly from the actual
interval.
Interval jump in the label tape (bonding point).
'Real' false trigger -> Check trigger sensor.
Error analysis with CAM_SL_TRIG_IV_MIN, CAM_SL_TRIG_IV_MAX.
37104: Slave trigger missing
Info:
Data type:
Description:
Runtime error when cam automat is active (CMD_CAM_START) if a slave trigger is not reached within the
valid window position. This means that the slave position exceeded the expected valid plus
CAM_SL_TRIG_WINDOW.
Reaction:
The expected trigger value is entered as replacement for the latch position.
The interval is advanced by the expected value. This could result in a deviation.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 147 di 164
Cause/Remedy:
Label missing.
Sensor failure.
See also error number 37103.
37105: Master compensation trigger outside of window
Info:
Data type:
Description:
Runtime error when cam automat is active (CMD_CAM_START) if a master compensation trigger is reached
outside the valid window position (CAM_MA_COMP_TRIG_WINDOW). Is only registered once following a
start or restart.
Reaction:
No effect when 'real' false trigger occurs.
A product is not labeled if the product trigger is rejected.
Cause/Remedy:
Window defined too small.
Incorrect parameters for calculating the first expected trigger position (CAM_MA_S_START,
CAM_MA_S_COMP_TRIG).
The defined master interval (CAM_MA_S_SYNC + CAM_MA_S_COMP) does not match the actual interval
exactly.
'Real' false trigger -> Check trigger sensor.
Error analysis with CAM_MA_COMP_TRIG_IV_MIN, CAM_MA_COMP_TRIG_IV_MAX.
37107: Displacement actual/set position too high during 'controller switch on'
Info:
Data type:
Description:
Response error using the 'Switch on controller when cam automat is active' command
(CMD_CAM_CONTROLLER=ncSWITCH_ON). The difference between the actual position and the set position
of the cam automat is calculated. This difference exceeds the valid range (CAM_SL_S_COMP_MAX,
CAM_SL_S_COMP, CAM_SL_S_COMP_MIN).
Reaction:
The command is executed and the controller is switched on.
Result of the large compensation path: Error number 37101 or
Error number 37102.
Cause/Remedy:
Axis movement while controller is off.
Limits are too strict (CAM_SL_S_COMP_MIN CAM_SL_S_COMP_MAX).
37108: Calculated compensation distance of master axis limited to minimum
Info:
Data type:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 148 di 164
Description:
Runtime error when cam automats are active during the calculation of a compensation gear. The 'effective'
master compensation is below the minimum value (AUT_COMP_MA_S_MIN). See also error number 5101.
Only registered once following a start or restart.
Reaction:
The compensation is calculated with the limit value.
As a result, the master interval is shifted.
Cause/Remedy:
Event with the ncAT_ONCE attribute occurs mistakenly.
Master compensation path is too short.
Master curve period is too large.
Master multiplication factors are too large.
37109: Master trigger outside of window
Info:
Data type:
Description:
Runtime error when cam automat is active (CMD_CAM_START) if a master product trigger is reached
outside the valid window position (CAM_MA_TRIG_WINDOW).
Reaction:
No effect when 'real' false trigger occurs.
A product is not labeled if the product trigger is rejected.
Cause/Remedy:
Window defined too small.
First expected trigger position is incorrect. See error number 37110.
The defined master interval (CAM_MA_S_SYNC + CAM_MA_S_COMP) does not match the actual interval
exactly.
'Real' false trigger -> Check trigger sensor.
37110: Master position at start higher than first trigger position
Info:
Data type:
Description:
Response error while starting the cam automat (CMD_CAM_START) if the current master position is already
located after the first expected position of the product trigger at the start. The first expected trigger
position is calculated as follows: CAM_MA_S_START + CAM_MA_S_SYNC + CAM_MA_S_COMP CAM_MA_S_TRIG
Reaction:
The cam automat start is executed.
The expected trigger position is corrected.
Cause/Remedy:
Incorrect parameter.
Master speed too high at start.
37111: Cam profile data: Difference between polynomial value y(xn) and slave
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 149 di 164
period
Info:
Difference
Data type:
REAL
Description:
Response error at the last data segment of the cam profile download (AUT_POLY_DATA). The polynomial
function value y(xn) is checked to see if it corresponds to the slave interval at the end of the master
interval. The function value is calculated as a float number. The intervals (periods) are placed in the cam
profile data as whole number. This warning is generated if there is a deviation greater than 0.01 and less
than 0.5. See also error number 5304.
Reaction:
The cam profile is accepted, but the deviation may cause position jumps during active cam profile coupling.
Cause/Remedy:
Numeric error while calculating the cam profile polynomial.
The calculation algorithm does not account for the fact that only whole-number intervals are allowed.
37112: Polynomial within cam profile data exceeds limit value
Info:
Detail
Data type:
UINT
Description:
Response error while writing AUT_POLY_CHECK. The polynomial of a cam profile is checked for limit
violations.
Reaction:
None.
Cause/Remedy:
The cam profile was incorrectly dimensioned.
The AUT_MA_V_MAX parameter or the axis limit is not correct.
Detail
1: Y-shift (position jump) to the left connection polynomial
2: Y-shift (position jump) to the right connection polynomial
3: Maximum acceleration in positive direction (AXLIM_A1_POS)
4: Maximum deceleration in positive direction (AXLIM_A2_POS)
5: Maximum acceleration in negative direction (AXLIM_A1_NEG)
6: Maximum deceleration in negative direction (AXLIM_A2_NEG)
7: Maximum speed in positive direction (AXLIM_V_POS)
8: Maximum speed in negative direction (AXLIM_V_NEG)
38000: Current controller: Motor speed at compensation of current offset too high
Info:
Data type:
Description:
Runtime error while switching on the current controller. The rotor speed (secondary element) is too high
during the compensation of the current offset. The current offsets cannot be compensated due to the
induced synchronous generated voltage.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 150 di 164
Reaction:
The current offsets are compensated with 0.
Cause/Remedy:
Drive switched on in standstill.
38001: Torque limit is additionally limited by peak ACOPOS current
Info:
Peak ACOPOS current
Data type:
REAL
Description:
Response error when writing a parameter for the torque limit (torque limit or torque limit override). The
drive cannot generate the electrical current required for the configured torque limit.
Reaction:
The torque limit is additionally limited by the maximum current of the drive.
Cause/Remedy:
The torque limit cannot be achieved due to the pairing of ACOPOS/motor.
Torque limit too high.
38003: Motor holding brake: Test torque was limited
Info:
Data type:
Description:
Runtime error during the holding brake torque test. The test torque could not be reached. Measured error
greater than 5%.
Reaction:
None.
Cause/Remedy:
Test torque too larger respectively torque limitation active (Check ACOPOS peak current, motor peak
current, temperatures).
Controller instable.
38004: Motor holding brake: Test torque less than load torque
Info:
Data type:
Description:
Runtime error during the holding brake torque test. The test torque is less than the actual load torque.
Reaction:
None.
Cause/Remedy:
Actual load torque is too large for the holding brake.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 151 di 164
Test torque too small.
Load torque determination incorrect (Current measuring system, motor configuration, rotor commutation or
motor encoder measuring system).
Controller instable.
39001: Encoder: Position correction active
Info:
Slot
Data type:
USINT
Description:
Runtime error in an EnDat or Hiperface encoder with activated monitor (activation, see error number
7030). The position difference between the incremental position of the plug-in card and the serial absolute
position of the encoder is too large after several comparison cycles.
This error is entered only one time.
Reaction:
The incremental position is readjusted according to the serial absolute position.
Cause/Remedy:
AB encoder connection is interrupted or defective. See wiring guidelines error number 7030.
Problem with the serial absolute position. See error number 39006.
Encoder defective.
AC120 or AC121 plug-in card defect.
39002: Resolver: Speed limit for 14 bit resolution exceeded
Info:
Slot
Data type:
USINT
Description:
Runtime error in a resolver. The permissible speed (4000 Rev/min per resolver pole pair) was exceeded at
a resolution of 2^14 increments per revolution.
Reaction:
None
Cause/Remedy:
Resolution or set speed defined too high (reduce the resolution or set speed).
Resolver defective.
Resolver connection is interrupted or defective. See wiring guidelines error number 7030.
AC122 plug-in card defective.
39003: EnDat encoder: Alarm bit is set
Info:
Slot
Data type:
USINT
Description:
Runtime error in an active EnDat encoder being used. Alarms were entered in the operating status register
of the encoder.
An alarm is set if a malfunction in the measurement system can cause incorrect position values.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 152 di 164
Reaction:
For encoders being actively used, additional warnings are entered according to the alarm memory read.
Referencing commands are not executed when an alarm is active.
Cause/Remedy:
Causes can be read from the following warnings.
39004: EnDat encoder: Alarm bit - Lighting failure
Info:
Slot
Data type:
USINT
Description:
Runtime error in an active EnDat encoder being used. Lighting failure in the optical encoder.
Reaction:
None
Cause/Remedy:
Encoder defective.
39005: EnDat encoder: Alarm bit - Signal amplitude too small
Info:
Slot
Data type:
USINT
Description:
Runtime error in an active EnDat encoder being used. The amplitudes of the sinusoidal incremental signals
are too small.
Reaction:
None
Cause/Remedy:
Encoder is no longer clean.
Encoder is incorrectly adjusted (check physical mounting).
Encoder defective.
39006: EnDat encoder: Alarm bit - Position value contains an error
Info:
Slot
Data type:
USINT
Description:
Runtime error in an EnDat encoder with activated monitor (activation, see error number 7030). The
position monitor internal to the encoder detected an error.
Reaction:
None
Cause/Remedy:
Encoder speed or speed of movement is too high.
Encoder vibrations (mechanical vibrations).
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 153 di 164
See also error number 39005.
39007: EnDat encoder: Alarm bit - Overvoltage
Info:
Slot
Data type:
USINT
Description:
Runtime error in an EnDat encoder with activated monitor (activation, see error number 7030). Supply
voltage too high.
Reaction:
None
Cause/Remedy:
Problem with the encoder supply voltage (check voltage fluctuations or disturbances).
Encoder defective.
39008: EnDat encoder: Alarm bit - Undervoltage
Info:
Slot
Data type:
USINT
Description:
Runtime error in an EnDat encoder with activated monitor (activation, see error number 7030). Supply
voltage too low.
Reaction:
None
Cause/Remedy:
See error number 39007.
39009: EnDat encoder: Alarm bit - Overcurrent
Info:
Slot
Data type:
USINT
Description:
Runtime error in an EnDat encoder with activated monitor (activation, see error number 7030). An overcurrent was measured in the encoder.
Reaction:
None
Cause/Remedy:
Encoder defect (internal short circuit).
39010: EnDat encoder: Alarm bit - Battery change required
Info:
Slot
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Data type:
Pagina 154 di 164
USINT
Description:
Runtime error in an EnDat encoder with activated monitor (activation, see error number 7030). Battery
must be changed.
Reaction:
None
Cause/Remedy:
Change encoder battery.
39011: EnDat encoder: Warning bit - Frequency too high
Info:
Slot
Data type:
USINT
Description:
Runtime error in an EnDat encoder with activated monitor (activation, see error number 7030). Count
frequency of the incremental signals too high.
Reaction:
None
Cause/Remedy:
Speed or speed of movement is too high.
Encoder vibrations (mechanical vibrations).
Encoder defective.
39012: EnDat encoder: Warning bit - Temperature too high
Info:
Slot
Data type:
USINT
Description:
Runtime error in an EnDat encoder with activated monitor (activation, see error number 7030). Encoder
temperature too high. A further temperature increase can cause position failure.
Reaction:
None
Cause/Remedy:
Check motor and environmental temperature.
Encoder defective.
39013: EnDat encoder: Warning bit - Lighting reserve reached
Info:
Slot
Data type:
USINT
Description:
Runtime error in an EnDat encoder with activated monitor (activation, see error number 7030). The
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 155 di 164
maximum manipulated variable for the brightness controller of the internal lighting has been reached.
Further fading of the brightness can cause position failure.
Reaction:
None
Cause/Remedy:
Aging of the encoder lighting.
Encoder defective.
39014: EnDat encoder: Warning bit - Battery charge too low
Info:
Slot
Data type:
USINT
Description:
Runtime error in an EnDat encoder with activated monitor (activation, see error number 7030). Battery
charge too low.
Reaction:
None
Cause/Remedy:
Change encoder battery.
Encoder defective.
39016: Incremental encoder emulation: Frequency too high
Info:
Slot
Data type:
UINT
Description:
Runtime error while executing the incremental encoder emulation. The speed of the output position
ENCODx_OUT_PARID is too high. The maximum frequency allowed is 65,000 signal periods per second.
Reaction:
The output frequency is limited according to the maximum frequency allowed. The emulated encoder
position tracks the output position to prevent increments from getting lost.
Cause/Remedy:
Encoder resolution of the incremental encoder emulation is too large.
Speed of the output position too high.
Output position jump due to homing (switch off encoder emulation during the homing).
39017: Encoder: CRC error while reading position
Info:
Slot
Data type:
USINT
Description:
Runtime error while reading the serial absolute position of an encoder. A CRC or checksum error occurred
during the data transfer.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 156 di 164
Reaction:
Serial absolute position is read again.
Cause/Remedy:
See error number 7014.
39018: Reference pulse monitoring: Faulty position, resolution, or reference
pulse
Info:
Slot
Data type:
USINT
Description:
Runtime error when incremental reference pulse monitor is active. The distance between two reference
pulses is outside the valid range.
Reaction:
None
Cause/Remedy:
Compare configuration of the reference pulse monitor (pulse width, pulse interval, watch window and
mode) with encoder data sheet.
See also error number 7047.
39019: Serial encoder interface: Stop bit error
Info:
Slot
Data type:
USINT
Description:
Runtime error while operating the serial interface of an encoder. A stop bit error occurred while receiving
data.
Reaction:
Encoder initialization: Data transfer is repeated.
Absolute position reading: Data is ignored.
Operation via data block transfer: None.
Cause/Remedy:
See error number 7014.
39020: Serial encoder interface: Receive data overrun
Info:
Slot
Data type:
USINT
Description:
Runtime error while operating the serial interface of an encoder. Receive buffer overflow while receiving
data.
Reaction:
Encoder initialization: Data transfer is repeated.
Absolute position reading: Data is ignored.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 157 di 164
Operation via data block transfer: None.
Cause/Remedy:
See error number 7014.
39021: Serial encoder interface: Send data error
Info:
Slot
Data type:
USINT
Description:
Runtime error while operating the serial interface of an encoder. A data transfer error occurred while
sending data.
Reaction:
Encoder initialization: Data transfer is repeated.
Absolute position reading: Data is ignored.
Operation via data block transfer: None.
Cause/Remedy:
See error number 7014.
39301: Digital IO: 24V power supply fail
Info:
Slot
Data type:
UINT
Description:
Runtime error in the supply voltage of an AC130 or AC131 plug-in card. The supply voltage is lower than
18V.
Reaction:
Supply to the outputs can no longer be guaranteed.
Cause/Remedy:
Check power supply control.
Power supply overload or malfunction.
Power supply defect.
Power supply connection defect (open line, line termination, wiring error, fuse).
AC130 or AC131 plug-in card defect.
39302: Digital IO 1-4: Diagnose bit active (current, 24V supply)
Info:
Slot
Data type:
UINT
Description:
Runtime error on digital outputs 1 to 4 of an AC130 plug-in card.
The diagnostics bit was set due to one of the following errors:
- Active current limitation of the output transistors
- Junction temperature of the transistors is too high
- Supply voltage too low
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 158 di 164
Reaction:
Current overload, supply voltage error or thermal overload causes the output to be shut off.
Cause/Remedy:
Continuous output load exceeded (see AC130 technical data).
Output short-circuit.
See also error number 39301.
39303: Digital IO 5-8: Diagnose bit active (current, 24V supply)
Info:
Slot
Data type:
UINT
Description:
Runtime error on digital outputs 5 to 8 of an AC130 plug-in card.
See also error number 39302.
Reaction:
See error number 39302.
Cause/Remedy:
See error number 39302.
39305: Digital IO 10: Diagnose bit active (current, temperature)
Info:
Slot
Data type:
UINT
Description:
Runtime error on digital output 10 of an AC130 plug-in card. The diagnostics but was set due to current
overload or thermal overload.
Reaction:
Current overload, or thermal overload causes the output to be shut off.
Cause/Remedy:
See error number 39302.
39306: Digital IO 9: Diagnose bit active (current, temperature)
Info:
Slot
Data type:
UINT
Description:
Runtime error on digital output 9 of an AC130 plug-in card.
See also error number 39305.
Reaction:
See error number 39305.
Cause/Remedy:
See error number 39302.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 159 di 164
41001: Heatsink temperature sensor: Overtemperature
Info:
Heatsink temperature
Data type:
REAL
Description:
Runtime error if the temperature of the heat sink temperature sensor TEMP_HEATSINK exceeds the
warning limit 0.95*103C.
Reaction:
None
Cause/Remedy:
See error number 9000.
41011: Motor temperature sensor: Overtemperature
Info:
Motor temperature
Data type:
REAL
Description:
Runtime error if the temperature of the motor temperature sensor TEMP_MOTOR exceeds the warning limit
0.95*110C.
Reaction:
None
Cause/Remedy:
See error number 9010.
41031: Junction temperature model: Overtemperature
Info:
Junction temperature
Data type:
REAL
Description:
Runtime error if the temperature of the junction temperature model TEMP_JUNCTION exceeds 95% of the
maximum junction temperature allowed (see error number 9030).
Reaction:
None
Cause/Remedy:
See error number 9030.
41041: Bleeder temperature model: Overtemperature
Info:
Bleeder temperature
Data type:
REAL
Description:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 160 di 164
Runtime error if the temperature of the braking resistor temperature model TEMP_BLEEDER exceeds 95%
of the maximum braking resistor temperature allowed (see error number 9040).
Reaction:
None
Cause/Remedy:
See error number 9040.
41051: ACOPOS peak current: Overload
Info:
Peak current load
Data type:
REAL
Description:
Runtime error if the ACOPOS peak current load LOAD_PEAK_CURR exceeds 95%.
See error number 9050.
Reaction:
None
Cause/Remedy:
See error number 9050.
41061: ACOPOS continuous current: Overload
Info:
Continuous current load
Data type:
REAL
Description:
Runtime error if the ACOPOS continuous current load LOAD_CONT_CURR exceeds 95%.
See error number 9060.
Reaction:
None
Cause/Remedy:
See error number 9060.
41070: Motor temperature model: Overtemperature
Info:
Calculated motor temperature
Data type:
REAL
Description:
Runtime error if the motor temperature model LOAD_MOTOR_MODEL exceeds 95%.
See error number 9070.
Reaction:
None
Cause/Remedy:
See error number 9070.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 161 di 164
41075: ACOPOS continuous power: Overload
Info:
Data type:
Description:
Runtime error if the ACOPOS continuous power LOAD_POWER exceeds 95%.
Reaction:
None
Cause/Remedy:
See error number 9075.
64001: ncalloc in slower task class than defined for NC Manager Task
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
64002: Delay before SW Reset (network with ascending node numbers ?)
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
64003: Delay before NC System Start (network with ascending node numbers ?)
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
64004: The following boot error could be entered here with a delay
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 162 di 164
Info:
Data type:
Description:
Reaction:
Cause/Remedy:
64005: Timeout for parameter enable after start of operating system
Info:
Status (bits with wrong value for parameter enable)
Data type:
UDINT
Description:
Reaction:
Cause/Remedy:
64006: Drive did not become synchronous with network master
Info:
Timeout [sec]
Data type:
UDINT
Description:
Reaction:
Cause/Remedy:
64500: Positive speed limiter active
Info:
Data type:
Description:
Runtime info at the input of the speed controller. The set speed SCTRL_SPEED_REF is limited to
SCTRL_LIM_V_POS in the positive direction.
Reaction:
None
Cause/Remedy:
64501: Negative speed limiter active
Info:
Data type:
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 163 di 164
Description:
Runtime info at the input of the speed controller. The set speed SCTRL_SPEED_REF is limited to
SCTRL_LIM_V_NEG in the negative direction.
Reaction:
None
Cause/Remedy:
64502: Positive direction acceleration torque limiter active
Info:
Data type:
Description:
Runtime info during torque limitation. The positive set quadrature current value ICTRL_ISQ_REF is limited
according to the torque LIM_T1_POS.
Reaction:
None
Cause/Remedy:
64503: Negative direction acceleration torque limiter active
Info:
Data type:
Description:
Runtime info during torque limitation. The negative set quadrature current value ICTRL_ISQ_REF is limited
according to the torque LIM_T1_NEG.
Reaction:
None
Cause/Remedy:
64504: Positive direction deceleration torque limiter active
Info:
Data type:
Description:
Runtime info during torque limitation. The positive set quadrature current value ICTRL_ISQ_REF is limited
according to the torque LIM_T2_POS.
Reaction:
None
Cause/Remedy:
64505: Negative direction deceleration torque limiter active
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
ACOPOS Error Texts
Pagina 164 di 164
Info:
Data type:
Description:
Runtime info during torque limitation. The negative set quadrature current value ICTRL_ISQ_REF is limited
according to the torque LIM_T2_NEG.
Reaction:
None
Cause/Remedy:
64506: Recovery power limiter active (deceleration too high)
Info:
Data type:
Description:
Runtime info when monitor is active (MSG_CONF_ERROR_NUMBER) if the set stator current of the
quadrature component ICTRL_ISQ_REF is limited by the recovery power limiter.
Reaction:
None
Cause/Remedy:
Set value generation: The generator power is higher than the maximum braking power of the braking
resistor when the axis is delayed. If the device is in a DC bus network and the sum of the generator power
is always smaller than the sum of the maximum braking power of all braking resistors, then the recovery
power limiter is switched off (PLIM_MODE=0).
Incorrect configuration of recovery power limiter: Resistance of the external braking resistor
R_BLEEDER_EXT is too low or stator resistance MOTOR_STATOR_RESISTANCE is too high.
file://C:\Documents and Settings\covatta\Impostazioni locali\Temp\~hhE9C7.htm
18/04/2007
Você também pode gostar
- 8BVP0440HW00.000-1 Acopos Multi P0440 B&R DatasheetDocumento17 páginas8BVP0440HW00.000-1 Acopos Multi P0440 B&R DatasheetGerman PachecoAinda não há avaliações
- Delem: Installation ManualDocumento36 páginasDelem: Installation ManualLademir FerreiraAinda não há avaliações
- Spesifikasi PM710Documento73 páginasSpesifikasi PM710Phan'iphan'Ainda não há avaliações
- c04 En2301en00en 0001Documento358 páginasc04 En2301en00en 0001Illich RosarioAinda não há avaliações
- Service Manual FP2 Rectifier FamilyDocumento10 páginasService Manual FP2 Rectifier Familydmax13Ainda não há avaliações
- 462458-01 AA CLARiSOFT User Manual - EN PDFDocumento175 páginas462458-01 AA CLARiSOFT User Manual - EN PDFCere_Ceric50% (4)
- Flatpack DC/DC 24/48 and 48/24 ConvertersDocumento20 páginasFlatpack DC/DC 24/48 and 48/24 ConvertersmicrocomsAinda não há avaliações
- Manual Prosonic Fmu 860 PDFDocumento130 páginasManual Prosonic Fmu 860 PDFLeonardo MarcuzziAinda não há avaliações
- User's Guide Smartpack Monitoring-Ctrl-Unit - B - 3Documento20 páginasUser's Guide Smartpack Monitoring-Ctrl-Unit - B - 3monurahulAinda não há avaliações
- Esab EMP 215IC/EMS 215IC: Service ManualDocumento102 páginasEsab EMP 215IC/EMS 215IC: Service ManualIon Andrei100% (1)
- NCR 333 (E) 7zpjd0342ainstallation 060628Documento80 páginasNCR 333 (E) 7zpjd0342ainstallation 060628origjasonAinda não há avaliações
- Dimm PC 520 IDocumento2 páginasDimm PC 520 IankitdhimancrAinda não há avaliações
- XMT SI 485 and XMP SI RF ATG Probes Technical GuideDocumento32 páginasXMT SI 485 and XMP SI RF ATG Probes Technical GuideAbraham Flores100% (2)
- Programming DriveCliQ Sin V43 CU320-2Documento4 páginasProgramming DriveCliQ Sin V43 CU320-2mrtansAinda não há avaliações
- Pace Pmu User's GuideDocumento49 páginasPace Pmu User's GuideTummanerale Srikantaswamy Mahesh88% (8)
- Parker SSD Drives 637F Software Manual PDFDocumento89 páginasParker SSD Drives 637F Software Manual PDFMr.K chAinda não há avaliações
- P810 For Windows - Manual PDFDocumento133 páginasP810 For Windows - Manual PDFSiding BarroAinda não há avaliações
- Wecon Hmi Pi3070i-NDocumento1 páginaWecon Hmi Pi3070i-NMiguel LunaAinda não há avaliações
- Manual Instrucciones Power-One Forza 48-25600 PDFDocumento112 páginasManual Instrucciones Power-One Forza 48-25600 PDFPaul Rasmussen100% (1)
- System Manual, Page 1.1Documento8 páginasSystem Manual, Page 1.1Juan FresnedaAinda não há avaliações
- 056-080 ModbusDocumento3 páginas056-080 ModbusngocAinda não há avaliações
- Maual Fagor 8055Documento110 páginasMaual Fagor 8055Robert DăboiAinda não há avaliações
- User Manual: Configuration With Web Interface Controller CSU 502Documento10 páginasUser Manual: Configuration With Web Interface Controller CSU 502moumen BoughraraAinda não há avaliações
- FK3u Analog 485Documento18 páginasFK3u Analog 485Vitex Ascensores GaliciaAinda não há avaliações
- RelativeJob PDFDocumento64 páginasRelativeJob PDFjuan carlosAinda não há avaliações
- Masterpact: Installation RecommendationsDocumento16 páginasMasterpact: Installation RecommendationsAsif ShahAinda não há avaliações
- User Manual - NetSure 501 A50 and NetSure 701 A51Documento125 páginasUser Manual - NetSure 501 A50 and NetSure 701 A51Marmeena A. Beniamin100% (2)
- ErviceDocumento103 páginasErviceHitesh PanigrahiAinda não há avaliações
- 3BSE064786-603 - A en Compact HMI 6.0.3.2 Release NotesDocumento30 páginas3BSE064786-603 - A en Compact HMI 6.0.3.2 Release NotesAjay SahuAinda não há avaliações
- 611U Manual PDFDocumento976 páginas611U Manual PDFBaldev SinghAinda não há avaliações
- Operating Instructions ANG VEC1105R0Documento284 páginasOperating Instructions ANG VEC1105R0Anonymous 0CnvpxSAinda não há avaliações
- 1190 Setup&InstallationDocumento109 páginas1190 Setup&InstallationkmduongAinda não há avaliações
- HOBUS-D-Trouble With Test ReportDocumento5 páginasHOBUS-D-Trouble With Test ReportTilika SorinAinda não há avaliações
- User Manual Upgrading Instructions ORION Controller: Concentrate On What Is Most Important For You - Your BusinessDocumento16 páginasUser Manual Upgrading Instructions ORION Controller: Concentrate On What Is Most Important For You - Your Businessmoumen BoughraraAinda não há avaliações
- PC - PLC PW Cable RS232 Online Cable Serial Cable. - PLCSDocumento3 páginasPC - PLC PW Cable RS232 Online Cable Serial Cable. - PLCSNildo TrindadeAinda não há avaliações
- PGQS e 2Documento104 páginasPGQS e 2selavilizationAinda não há avaliações
- EMF2102IB - LECOM-A-B-Li AIF Module - v2-0 - EN PDFDocumento62 páginasEMF2102IB - LECOM-A-B-Li AIF Module - v2-0 - EN PDFRuben MondejarAinda não há avaliações
- Eea-Pam 32Documento8 páginasEea-Pam 32Johnny Diaz VargasAinda não há avaliações
- APS (SM40 Controlled) Installation Guide - 37B (Web Version)Documento94 páginasAPS (SM40 Controlled) Installation Guide - 37B (Web Version)Elvis Eliud Hernández100% (1)
- BP250 System Programming Manual PDFDocumento27 páginasBP250 System Programming Manual PDFalvarobello100% (1)
- USM - DPD200 DPS1200B 48 3RS 19IN - enDocumento200 páginasUSM - DPD200 DPS1200B 48 3RS 19IN - enDIMA4RSAinda não há avaliações
- Tlc511f Rev.1.105 Berger Lahr Manual DatasheetDocumento212 páginasTlc511f Rev.1.105 Berger Lahr Manual Datasheetacm197621Ainda não há avaliações
- Manual ProtoCessorDocumento33 páginasManual ProtoCessorjohaquin loveAinda não há avaliações
- System and Start-Up BehaviorDocumento6 páginasSystem and Start-Up BehaviorJuan FresnedaAinda não há avaliações
- VCB 2C Vector - GBDocumento117 páginasVCB 2C Vector - GBppeanut70100% (1)
- Mitsubishi Q64DA Series Anolog Module User ManualDocumento186 páginasMitsubishi Q64DA Series Anolog Module User ManualZall Boed-zilsAinda não há avaliações
- Man Dds HardDocumento418 páginasMan Dds HardVladAinda não há avaliações
- MAnual UPS APCDocumento11 páginasMAnual UPS APCAlejandro ScrepantiAinda não há avaliações
- e 1Documento353 páginase 1Amit JholaparaAinda não há avaliações
- User Manual FPRA G02Documento57 páginasUser Manual FPRA G02Ivan StanojevicAinda não há avaliações
- Aop BopDocumento8 páginasAop BopPassenger Medeam100% (1)
- User Manual Product Description Rectifier DPR 6000B: Concentrate On What Is Most Important For You - Your BusinessDocumento14 páginasUser Manual Product Description Rectifier DPR 6000B: Concentrate On What Is Most Important For You - Your BusinessNdambuki Dickson100% (1)
- ZXD T02 S201 Solar Charge Controller Manual v1 or 2Documento35 páginasZXD T02 S201 Solar Charge Controller Manual v1 or 2Ermias Desta100% (1)
- Datasheet - Delta ORION ControllerDocumento2 páginasDatasheet - Delta ORION Controllerahmed100% (1)
- SWA2000C THB060601Er2bDocumento100 páginasSWA2000C THB060601Er2bEdin DurgutiAinda não há avaliações
- PSS 3074 - ManualDocumento71 páginasPSS 3074 - Manualsgibadullin100% (1)
- Diagnosing The PanicDocumento6 páginasDiagnosing The PanicRakesh SinghAinda não há avaliações
- Status Code 84: Media Write ErrorDocumento6 páginasStatus Code 84: Media Write Errorvickyork_1134976Ainda não há avaliações
- Code 83Documento7 páginasCode 83subhrajitm47Ainda não há avaliações
- KM002100G MDW Serial Protocol Up To Version 6 05Documento14 páginasKM002100G MDW Serial Protocol Up To Version 6 05Alexandr TimofeevAinda não há avaliações
- KM002102G MDW Serial Protocol From Version 6 06 XXDocumento16 páginasKM002102G MDW Serial Protocol From Version 6 06 XXAlexandr TimofeevAinda não há avaliações
- KM000501G mdt-3cDocumento27 páginasKM000501G mdt-3cAlexandr TimofeevAinda não há avaliações
- Operation Guide 3259: About This Manual Things To Check Before Using The WatchDocumento14 páginasOperation Guide 3259: About This Manual Things To Check Before Using The WatchAlexandr TimofeevAinda não há avaliações
- Project Network Protocol and Application: "Transfer Internet Hi-Speed"Documento7 páginasProject Network Protocol and Application: "Transfer Internet Hi-Speed"Plewfire MasterAinda não há avaliações
- The Difference Between DVD-R, DVD+R, DVD+RW and DVD-RWDocumento2 páginasThe Difference Between DVD-R, DVD+R, DVD+RW and DVD-RWJagmohan JagguAinda não há avaliações
- Microprocessor and Microcontroller Fundamentals by William KleitzDocumento5 páginasMicroprocessor and Microcontroller Fundamentals by William KleitzMICHAEL K. E. DonkorAinda não há avaliações
- RMAN Restore To New HostDocumento5 páginasRMAN Restore To New HostSaeed MeethalAinda não há avaliações
- ¡ IMS 8.2¡¿SPG2800 Version Differences (Between R3C02 and R3C01)Documento23 páginas¡ IMS 8.2¡¿SPG2800 Version Differences (Between R3C02 and R3C01)sirjimyAinda não há avaliações
- Introduction To Computer L-1Documento51 páginasIntroduction To Computer L-1Md Safayet IslamAinda não há avaliações
- Materi & System RequirementDocumento5 páginasMateri & System RequirementRaden Budi HermawanAinda não há avaliações
- WiBox InstallationDocumento11 páginasWiBox Installationhoan vanAinda não há avaliações
- Management Plane ProtectionDocumento104 páginasManagement Plane ProtectionIvan MachuzaAinda não há avaliações
- JJJJJJJDocumento3 páginasJJJJJJJJoãoLucianiFerreiraAinda não há avaliações
- Embedded Design With The Microblaze Soft Processor Core: Fpga and Asic Technology Comparison - 1Documento39 páginasEmbedded Design With The Microblaze Soft Processor Core: Fpga and Asic Technology Comparison - 1FelipeAinda não há avaliações
- Security+ Chapter 8 AnswersDocumento2 páginasSecurity+ Chapter 8 AnswersFrank StevensonAinda não há avaliações
- Controladora de Campo FC-2600Documento4 páginasControladora de Campo FC-2600DavidCatalanAinda não há avaliações
- Webscarab InstructionsDocumento12 páginasWebscarab InstructionsLin DengAinda não há avaliações
- Cygwin User's GuideDocumento93 páginasCygwin User's GuideCholai KurapaAinda não há avaliações
- 6AV21232GA030AX0 Datasheet enDocumento6 páginas6AV21232GA030AX0 Datasheet ensdvfsAinda não há avaliações
- 3.3.4 Packet Tracer - Deploy and Cable Devices - ILMDocumento2 páginas3.3.4 Packet Tracer - Deploy and Cable Devices - ILMMarcela Andrea Orellana SilvaAinda não há avaliações
- CMDB AdminDocumento140 páginasCMDB AdminFireball IndiaAinda não há avaliações
- Apple Color StyleWriter 6500Documento2 páginasApple Color StyleWriter 6500scriAinda não há avaliações
- June 2012 Ugc Net Computer Science - SolvedDocumento20 páginasJune 2012 Ugc Net Computer Science - Solvedvani_ppcAinda não há avaliações
- SDWAN - A Technical Tutorial by FAE Telecom Oct2019Documento40 páginasSDWAN - A Technical Tutorial by FAE Telecom Oct2019Jonny TekAinda não há avaliações
- Avery Error Codes PDFDocumento67 páginasAvery Error Codes PDFPaolo Vicencio GarciaAinda não há avaliações
- Nexlog Push Upgrade InstructionsDocumento2 páginasNexlog Push Upgrade InstructionsahmedAinda não há avaliações
- "Implementation of Keylogger Using HOOKUP Algorithm": Project SynopsisDocumento7 páginas"Implementation of Keylogger Using HOOKUP Algorithm": Project Synopsisraman dwivediAinda não há avaliações
- LTE - eRan13.1 - LTE Only Suggest to Use NIC - LTE - eRan13.1 - LTE Only Suggest to Use NIC - 01.【GUL Data Collection Assistant】【Throughput】KPI DL ScanarioDocumento66 páginasLTE - eRan13.1 - LTE Only Suggest to Use NIC - LTE - eRan13.1 - LTE Only Suggest to Use NIC - 01.【GUL Data Collection Assistant】【Throughput】KPI DL ScanarioAzhar Faheem100% (1)
- Big Tap Monitoring Fabric v4.5Documento8 páginasBig Tap Monitoring Fabric v4.5tomertoAinda não há avaliações
- Assembly Language Program To Find Largest Number in An ArrayDocumento2 páginasAssembly Language Program To Find Largest Number in An ArrayAldrin RogenAinda não há avaliações
- Ex2300 Ethernet Switch DatasheetDocumento12 páginasEx2300 Ethernet Switch Datasheetnaufal irfanAinda não há avaliações
- MoldDesign Catalog Installation GuideDocumento10 páginasMoldDesign Catalog Installation GuideXavier CornejoAinda não há avaliações
- 2020 New Braindump2go Associate Cloud Engineer PDF and VCE Dumps (87-97)Documento3 páginas2020 New Braindump2go Associate Cloud Engineer PDF and VCE Dumps (87-97)Angga Alpa WibowoAinda não há avaliações
- Blockchain Basics: A Non-Technical Introduction in 25 StepsNo EverandBlockchain Basics: A Non-Technical Introduction in 25 StepsNota: 4.5 de 5 estrelas4.5/5 (24)
- Optimizing DAX: Improving DAX performance in Microsoft Power BI and Analysis ServicesNo EverandOptimizing DAX: Improving DAX performance in Microsoft Power BI and Analysis ServicesAinda não há avaliações
- Grokking Algorithms: An illustrated guide for programmers and other curious peopleNo EverandGrokking Algorithms: An illustrated guide for programmers and other curious peopleNota: 4 de 5 estrelas4/5 (16)
- SQL QuickStart Guide: The Simplified Beginner's Guide to Managing, Analyzing, and Manipulating Data With SQLNo EverandSQL QuickStart Guide: The Simplified Beginner's Guide to Managing, Analyzing, and Manipulating Data With SQLNota: 4.5 de 5 estrelas4.5/5 (46)
- Fusion Strategy: How Real-Time Data and AI Will Power the Industrial FutureNo EverandFusion Strategy: How Real-Time Data and AI Will Power the Industrial FutureAinda não há avaliações
- ITIL 4 : Drive Stakeholder Value: Reference and study guideNo EverandITIL 4 : Drive Stakeholder Value: Reference and study guideAinda não há avaliações
- Business Intelligence Strategy and Big Data Analytics: A General Management PerspectiveNo EverandBusiness Intelligence Strategy and Big Data Analytics: A General Management PerspectiveNota: 5 de 5 estrelas5/5 (5)
- The Future of Competitive Strategy: Unleashing the Power of Data and Digital Ecosystems (Management on the Cutting Edge)No EverandThe Future of Competitive Strategy: Unleashing the Power of Data and Digital Ecosystems (Management on the Cutting Edge)Nota: 5 de 5 estrelas5/5 (1)
- Relational Database Design and ImplementationNo EverandRelational Database Design and ImplementationNota: 4.5 de 5 estrelas4.5/5 (5)
- High-Performance Oracle: Proven Methods for Achieving Optimum Performance and AvailabilityNo EverandHigh-Performance Oracle: Proven Methods for Achieving Optimum Performance and AvailabilityAinda não há avaliações
- Oracle Database 12c Backup and Recovery Survival GuideNo EverandOracle Database 12c Backup and Recovery Survival GuideNota: 4.5 de 5 estrelas4.5/5 (3)
- Agile Metrics in Action: How to measure and improve team performanceNo EverandAgile Metrics in Action: How to measure and improve team performanceAinda não há avaliações
- Microsoft Access Guide to Success: From Fundamentals to Mastery in Crafting Databases, Optimizing Tasks, & Making Unparalleled Impressions [III EDITION]No EverandMicrosoft Access Guide to Success: From Fundamentals to Mastery in Crafting Databases, Optimizing Tasks, & Making Unparalleled Impressions [III EDITION]Nota: 5 de 5 estrelas5/5 (8)


























































































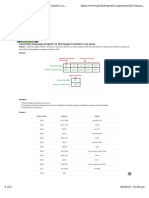
























![Microsoft Access Guide to Success: From Fundamentals to Mastery in Crafting Databases, Optimizing Tasks, & Making Unparalleled Impressions [III EDITION]](https://imgv2-2-f.scribdassets.com/img/word_document/610686937/149x198/9ccfa6158e/1714467780?v=1)
