Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- 8-VHF Omni-Directional Range (VOR)Documento42 páginas8-VHF Omni-Directional Range (VOR)Niyazi Cem GürsoyAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- 165e094800 (A100 S) R3 CMMDocumento312 páginas165e094800 (A100 S) R3 CMMKumaraswamy RSAinda não há avaliações
- Tutorial Guide For PICsDocumento27 páginasTutorial Guide For PICsJose Smith100% (1)
- TB6560 ManualDocumento2 páginasTB6560 ManualEmerson Luiz BusnelloAinda não há avaliações
- Ffus10-1g1io Flow SensorDocumento12 páginasFfus10-1g1io Flow SensorsujingthetAinda não há avaliações
- Denon 5200Documento1 páginaDenon 5200dan-gabiAinda não há avaliações
- LTE - Alarm MappingDocumento4 páginasLTE - Alarm MappingEhtesham KhanAinda não há avaliações
- Handbook Open Submarine Cable Channel PlanningDocumento9 páginasHandbook Open Submarine Cable Channel PlanningKhurrambaigAinda não há avaliações
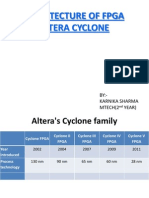
- Architecture of Fpga Altera Cyclone: BY:-Karnika Sharma Mtech (2 Year)Documento29 páginasArchitecture of Fpga Altera Cyclone: BY:-Karnika Sharma Mtech (2 Year)karnika143100% (1)
- JBL Partybox OnthegoDocumento42 páginasJBL Partybox Onthegovs674584Ainda não há avaliações
- Manual Samson Expedition ExpressDocumento72 páginasManual Samson Expedition Expressmgibson2000Ainda não há avaliações
- 1333228531.0442unit 4Documento19 páginas1333228531.0442unit 4RolandDanangWijaya0% (1)
- Gallien Krueger ManualDocumento12 páginasGallien Krueger ManualAntonio LombardiAinda não há avaliações
- Frequncy Re-Use, Co-Channel Interference, Cell Splitting SectoringDocumento32 páginasFrequncy Re-Use, Co-Channel Interference, Cell Splitting SectoringBhuvan VarmaAinda não há avaliações
- Nyquist Sampling Rate 2fmaxDocumento4 páginasNyquist Sampling Rate 2fmaxXuan Bei OhAinda não há avaliações
- 1982 NEC Microcomputer CatalogDocumento756 páginas1982 NEC Microcomputer CatalogPrzemysław WójcikAinda não há avaliações
- Optical Ethernet PDFDocumento24 páginasOptical Ethernet PDFPrince ChaudharyAinda não há avaliações
- Presented By: Subhradeep Mitra & Debanjan MukherjeeDocumento32 páginasPresented By: Subhradeep Mitra & Debanjan MukherjeeAkhilesh ChoudharyAinda não há avaliações
- BBP Mockman PDFDocumento1 páginaBBP Mockman PDFFernando de LuccaAinda não há avaliações
- Kemper Profiler Reference Manual 3.0Documento146 páginasKemper Profiler Reference Manual 3.0pepoterjackson100% (1)
- Vehicle To Infrastructure Communication Different Methods and Technologies Used For ItDocumento3 páginasVehicle To Infrastructure Communication Different Methods and Technologies Used For ItBargavi SrinivasAinda não há avaliações
- GM730 Seismic Detector: Fire Safety & Security ProductsDocumento3 páginasGM730 Seismic Detector: Fire Safety & Security ProductsDanAinda não há avaliações
- Panic Alarm Button (269R)Documento1 páginaPanic Alarm Button (269R)Usman ZouqueAinda não há avaliações
- SIM800 Series at Command Manual V1.05Documento367 páginasSIM800 Series at Command Manual V1.05Oscar Aiza VeramendiAinda não há avaliações
- Atmega328 Timer/Counter Usage: Sistemas Embebidos Oscar Acevedo, PHDDocumento10 páginasAtmega328 Timer/Counter Usage: Sistemas Embebidos Oscar Acevedo, PHDBrisman Ricardo Palacin VargasAinda não há avaliações
- NAD T751 Service ManualDocumento64 páginasNAD T751 Service ManualIrving AguilarAinda não há avaliações
- How To Connect A Cable's Shielding To Earth Potential - Maxon SupportDocumento4 páginasHow To Connect A Cable's Shielding To Earth Potential - Maxon Supportwindreader1Ainda não há avaliações
- Easy Ups On-Line - Srv6kiDocumento3 páginasEasy Ups On-Line - Srv6kiSamuel Orihuela RocabadoAinda não há avaliações
- The RR9 Receiver - G0KJKDocumento3 páginasThe RR9 Receiver - G0KJKDefaultAnomolyAinda não há avaliações
- Steca Solsum Productdatasheet EN PDFDocumento1 páginaSteca Solsum Productdatasheet EN PDFCalin SilviuAinda não há avaliações