Você também pode gostar
- Kuna Nega 4Documento1 páginaKuna Nega 4HoodmyAinda não há avaliações
- Kuna Nega 3Documento1 páginaKuna Nega 3HoodmyAinda não há avaliações
- Kuna Nega 2Documento1 páginaKuna Nega 2HoodmyAinda não há avaliações
- Pasos de Amazon FbaDocumento4 páginasPasos de Amazon FbaHoodmyAinda não há avaliações
- Ficha Tecnica Lmaina GalvanizadaDocumento1 páginaFicha Tecnica Lmaina GalvanizadaHoodmyAinda não há avaliações
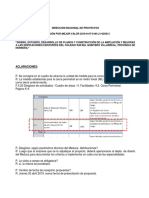
- AclaracionesDocumento11 páginasAclaracionesHoodmyAinda não há avaliações
- NOTA-1415-21 Sometido #74Documento2 páginasNOTA-1415-21 Sometido #74HoodmyAinda não há avaliações
- PRODUCTOSDocumento3 páginasPRODUCTOSHoodmyAinda não há avaliações
- NOTA-1415-21 Sometido #74Documento2 páginasNOTA-1415-21 Sometido #74HoodmyAinda não há avaliações
- Tabla CasaDocumento3 páginasTabla CasaHoodmyAinda não há avaliações
- Impacto TIC liderazgo docenteDocumento6 páginasImpacto TIC liderazgo docenteHoodmyAinda não há avaliações
- Liberación de La MenteDocumento5 páginasLiberación de La MenteHoodmyAinda não há avaliações
- Casa - 6Documento1 páginaCasa - 6HoodmyAinda não há avaliações
- El-07 Icendio Pab 3Documento1 páginaEl-07 Icendio Pab 3HoodmyAinda não há avaliações
- Observaciones ElectricasDocumento3 páginasObservaciones ElectricasHoodmyAinda não há avaliações
- Prueba 1Documento1 páginaPrueba 1HoodmyAinda não há avaliações
- Observaciones ElectricasDocumento3 páginasObservaciones ElectricasHoodmyAinda não há avaliações
- ¿El Arrebatamiento de La Iglesia - o La Reunificación de IsraelDocumento11 páginas¿El Arrebatamiento de La Iglesia - o La Reunificación de IsraelLisandro MadrizAinda não há avaliações
- Arreglar Error 1722Documento1 páginaArreglar Error 1722HoodmyAinda não há avaliações
- Plano de TallerDocumento1 páginaPlano de TallerHoodmyAinda não há avaliações
- Casa - 2Documento1 páginaCasa - 2HoodmyAinda não há avaliações
- ¿Jesús Era Un Niño Cristiano Que Iba A La Iglesia Todos Los DomingosDocumento2 páginas¿Jesús Era Un Niño Cristiano Que Iba A La Iglesia Todos Los DomingosHoodmy100% (2)
- El Poder de Los Angeles Cabalisticos - 128pgs PDFDocumento128 páginasEl Poder de Los Angeles Cabalisticos - 128pgs PDFleon david100% (2)
- Shir A ShirimDocumento34 páginasShir A ShirimHoodmyAinda não há avaliações
- Maquinas de AuditorioDocumento9 páginasMaquinas de AuditorioHoodmyAinda não há avaliações
- Casa - 5Documento1 páginaCasa - 5HoodmyAinda não há avaliações
- Vacantes docentes Panamá matemáticas físicaDocumento2 páginasVacantes docentes Panamá matemáticas físicaHoodmyAinda não há avaliações
- Kidush Del Viernes Por La NocheDocumento16 páginasKidush Del Viernes Por La NocheHoodmyAinda não há avaliações
- PEDIDOSDocumento6 páginasPEDIDOSHoodmyAinda não há avaliações
- Luces de ShabatDocumento2 páginasLuces de ShabatHoodmyAinda não há avaliações
- P29Documento3 páginasP29Emiliano SimonAinda não há avaliações
- El Color Como Fenómeno Físico y QuímicoDocumento6 páginasEl Color Como Fenómeno Físico y QuímicoJorge RichkardayAinda não há avaliações
- TeSys D - TeSys Deca Control - Tallas 1 - 2 y 3 - LC1D150M7Documento7 páginasTeSys D - TeSys Deca Control - Tallas 1 - 2 y 3 - LC1D150M7mgferreyraAinda não há avaliações
- Potencia en CADocumento11 páginasPotencia en CALuis JaramilloAinda não há avaliações
- Ejercicios para Bobinar Motores TrifásicosDocumento11 páginasEjercicios para Bobinar Motores TrifásicosAlex Asdasd MCAinda não há avaliações
- Acelerómetro PiezoeléctricoDocumento3 páginasAcelerómetro PiezoeléctricoPo Ol CAinda não há avaliações
- Esp Rev0104 T222MLDocumento10 páginasEsp Rev0104 T222MLdionisioAinda não há avaliações
- Aeg Ps Inversor MTP-B Inv 120 EsDocumento2 páginasAeg Ps Inversor MTP-B Inv 120 EsDiego100% (2)
- Previo 3Documento5 páginasPrevio 3César SGAinda não há avaliações
- Syllabus 10 1 1Documento3 páginasSyllabus 10 1 1Jj-ulio N CanalesAinda não há avaliações
- Fusible de Baja TensionDocumento3 páginasFusible de Baja TensionGaby SanchezAinda não há avaliações
- CT-PT009 Medidas y Vigilancia de Las Instalaciones de Puesta A TierraDocumento32 páginasCT-PT009 Medidas y Vigilancia de Las Instalaciones de Puesta A TierraMauricio Leyton Otarola0% (1)
- Medicion de THDDocumento12 páginasMedicion de THDAlisson PedrazaAinda não há avaliações
- Manual - Proyectos de Distribucion Chilectra Pag 151Documento169 páginasManual - Proyectos de Distribucion Chilectra Pag 151Chris Camilo75% (4)
- Distribución EléctricaDocumento4 páginasDistribución EléctricaAbraham Balbuena SandovalAinda não há avaliações
- Computos Metricos Electricidad 0872 1000 1125 CM 0001-0-00 RADocumento16 páginasComputos Metricos Electricidad 0872 1000 1125 CM 0001-0-00 RARicardo Suarez100% (1)
- Nota TecnicaDocumento4 páginasNota TecnicaLex De'LargeAinda não há avaliações
- Informe Tecnico - Cables Blindados para Redes de Area Local (Lan)Documento2 páginasInforme Tecnico - Cables Blindados para Redes de Area Local (Lan)Carlos Mario Trejos SuarezAinda não há avaliações
- 1 Laboratorio de Circuitos Uni FimDocumento23 páginas1 Laboratorio de Circuitos Uni FimEdixon Goicochea Cruzado33% (3)
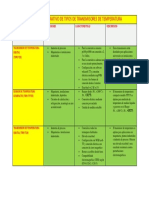
- Cuadro comparativo de los tipos de transmisores de temperaturaDocumento1 páginaCuadro comparativo de los tipos de transmisores de temperaturaRonal Mamani Apaza0% (1)
- Leroy SomerDocumento20 páginasLeroy SomerSELVYN SANCHEZ100% (1)
- Interruptores de MT en vacío para distribución secundariaDocumento56 páginasInterruptores de MT en vacío para distribución secundarialarryAinda não há avaliações
- Centros de CargaDocumento7 páginasCentros de Cargaisrael peñaAinda não há avaliações
- Geo-Inf-Aas-Redes-023 Rev.00 (15-03-2022)Documento20 páginasGeo-Inf-Aas-Redes-023 Rev.00 (15-03-2022)Marcelo Aros InostrozaAinda não há avaliações
- Documentos Adjuntos para Tramites en La Municipalidad Satch - ChiclayoDocumento8 páginasDocumentos Adjuntos para Tramites en La Municipalidad Satch - ChiclayoJohn Edwards Lecca BernillaAinda não há avaliações
- Laboratorio 2 Ley de Ohm en Circuitos de Corriente ContinuaDocumento9 páginasLaboratorio 2 Ley de Ohm en Circuitos de Corriente ContinuaBob0% (2)
- CEO-GTO40-ISA-EM-DOC-001 Criterios Basico de Diseño ElectromecanicoDocumento22 páginasCEO-GTO40-ISA-EM-DOC-001 Criterios Basico de Diseño Electromecanicofreyde alvarez vasquezAinda não há avaliações
- ElectricidadDocumento6 páginasElectricidadNadia Garcia MirandaAinda não há avaliações
- Sistema fotovoltaico off-grid para viviendaDocumento26 páginasSistema fotovoltaico off-grid para viviendaPatricioAinda não há avaliações
- Superficies-EquipotencialesDocumento8 páginasSuperficies-EquipotencialesElkingAinda não há avaliações