Você também pode gostar
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Clerk Model Paper Computer by (WWW - Questionpaperz.in)Documento5 páginasClerk Model Paper Computer by (WWW - Questionpaperz.in)Elakkiya KarthicAinda não há avaliações
- Clerk Model Paper 1 AnswersDocumento4 páginasClerk Model Paper 1 AnswersElakkiya KarthicAinda não há avaliações
- Ibps Clerk 2011Documento38 páginasIbps Clerk 2011rajwants921620Ainda não há avaliações
- Adjectives PDFDocumento3 páginasAdjectives PDFManoj KbAinda não há avaliações
- IBPS CWE PO/MT 2012 Question Paper With Answer KeyDocumento29 páginasIBPS CWE PO/MT 2012 Question Paper With Answer KeysachinAinda não há avaliações
- SBI Clerk Examination Mock Model Question PaperDocumento12 páginasSBI Clerk Examination Mock Model Question Paperanon_82618091Ainda não há avaliações
- IBPS Clerk Question PaperDocumento16 páginasIBPS Clerk Question PaperjagdishAinda não há avaliações
- Ibps Po Cwe: Test-I: Reasoning AbilityDocumento24 páginasIbps Po Cwe: Test-I: Reasoning AbilityBalu RahulAinda não há avaliações
- The 5 Generations of ComputersDocumento14 páginasThe 5 Generations of ComputersVehleSinghAinda não há avaliações
- Car 16 PDFDocumento7 páginasCar 16 PDFElakkiya KarthicAinda não há avaliações
- IBPS Common Written Exam PO / MT: Test - I: Reasoning AbilityDocumento46 páginasIBPS Common Written Exam PO / MT: Test - I: Reasoning AbilitysachinAinda não há avaliações
- Solar Tracking SystemDocumento12 páginasSolar Tracking SystemSrinivas MudhirajAinda não há avaliações
- IBPS Clerk 2012 16.12.2012Documento33 páginasIBPS Clerk 2012 16.12.2012Elakkiya KarthicAinda não há avaliações
- Office of The Director General of Civil AviationDocumento4 páginasOffice of The Director General of Civil AviationElakkiya KarthicAinda não há avaliações
- (Unless Otherwise Specified, Dimensions Are in Inches.) 1.: Autocad Tutorial: 2D Fundamentals Add-1Documento10 páginas(Unless Otherwise Specified, Dimensions Are in Inches.) 1.: Autocad Tutorial: 2D Fundamentals Add-1shaikhaziz84Ainda não há avaliações
- Office of The Director General of Civil Aviation: SubjectDocumento21 páginasOffice of The Director General of Civil Aviation: SubjectchelliboyanaAinda não há avaliações
- Design & Development of A Two-Jaw Parallel Pneumatic GripperDocumento49 páginasDesign & Development of A Two-Jaw Parallel Pneumatic Gripperengr_faheemAinda não há avaliações
- Abirami AnthathiDocumento24 páginasAbirami Anthathijekay2ab92% (12)
- Conveyer For Quality ControlDocumento2 páginasConveyer For Quality ControlElakkiya KarthicAinda não há avaliações
- Train ProjectDocumento74 páginasTrain ProjectElakkiya KarthicAinda não há avaliações
- Auto Cad MechtrncsDocumento41 páginasAuto Cad MechtrncsElakkiya KarthicAinda não há avaliações
- Engine Oil Alerting SystemDocumento3 páginasEngine Oil Alerting SystemElakkiya KarthicAinda não há avaliações
- Belajar Autocad 3DDocumento15 páginasBelajar Autocad 3DMuhammad SyawalAinda não há avaliações
- Dress Wasing Attachments in Gym CycleDocumento2 páginasDress Wasing Attachments in Gym CycleElakkiya KarthicAinda não há avaliações
- Automatic Foot Dust CleanerDocumento2 páginasAutomatic Foot Dust CleanerElakkiya Karthic100% (1)
- 16 Mark QuestionDocumento3 páginas16 Mark QuestionElakkiya Karthic100% (1)
- Compression Air EngineDocumento1 páginaCompression Air EngineElakkiya KarthicAinda não há avaliações
- Piezo Electric Power Generation Using Shock AbsorberDocumento1 páginaPiezo Electric Power Generation Using Shock AbsorberElakkiya KarthicAinda não há avaliações
- Aerodrome Data, Physical Characteristics and Obstacle RestrictionDocumento19 páginasAerodrome Data, Physical Characteristics and Obstacle RestrictionElakkiya Karthic100% (1)
- (Part 1) : ME 582 Advanced Materials Science Chapter 3 Micromechanical Analysis of A LaminaDocumento26 páginas(Part 1) : ME 582 Advanced Materials Science Chapter 3 Micromechanical Analysis of A LaminaElakkiya KarthicAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Tranportation All ExperimentDocumento55 páginasTranportation All ExperimentMaiwand KhanAinda não há avaliações
- Precast Concrete ConstructionDocumento12 páginasPrecast Concrete ConstructionRemya R. KumarAinda não há avaliações
- Science at The Environment Agency - Essay - United State Literature - Professor Mike DepledgeDocumento343 páginasScience at The Environment Agency - Essay - United State Literature - Professor Mike Depledgeadnan-hAinda não há avaliações
- Phase Diagrams: PT PTDocumento5 páginasPhase Diagrams: PT PTRyan Tw ChoumingAinda não há avaliações
- Akay Acoustics of Friction PDFDocumento24 páginasAkay Acoustics of Friction PDFgene_sparcAinda não há avaliações
- Tempered Martensite: H. K. D. H. BhadeshiaDocumento20 páginasTempered Martensite: H. K. D. H. BhadeshiaBahaa Eldin Sayed BahaaAinda não há avaliações
- Owner'S Manual: New Type Cyclone Vacuum CleanerDocumento24 páginasOwner'S Manual: New Type Cyclone Vacuum CleanerniknikolAinda não há avaliações
- CH10 CFLDocumento11 páginasCH10 CFLNoman KhanAinda não há avaliações
- Chapter 1 Technology and DevelopmentDocumento46 páginasChapter 1 Technology and DevelopmentKeep ThrowAinda não há avaliações
- BS 5896 2012 - SecuredDocumento30 páginasBS 5896 2012 - SecuredAdonis KumAinda não há avaliações
- 209-Titan PSW 12Documento2 páginas209-Titan PSW 12jafaristsAinda não há avaliações
- Shaper, Slotter and PlanerDocumento9 páginasShaper, Slotter and PlanerRenjith RajendraprasadAinda não há avaliações
- Lighting: Tef 2440 Obstruction Light Low Intensity, Type ADocumento2 páginasLighting: Tef 2440 Obstruction Light Low Intensity, Type Apramod_tryAinda não há avaliações
- Exercise AnswerDocumento3 páginasExercise AnswerMaridjan WiwahaAinda não há avaliações
- Residual Strength A N D Crack Propagation Tests O N C-130 Airplane Center Wings With Service-Imposed Fatigue DamageDocumento69 páginasResidual Strength A N D Crack Propagation Tests O N C-130 Airplane Center Wings With Service-Imposed Fatigue DamagemilindshettiAinda não há avaliações
- 3D Printing Printing Precision and Application in Food SectorDocumento12 páginas3D Printing Printing Precision and Application in Food SectorAhmad Al-HusainAinda não há avaliações
- Handling of Gaseous Fuels: Caroline P. Mirandilla Catherine C. Glorioso Josua Royce S. RuzolDocumento16 páginasHandling of Gaseous Fuels: Caroline P. Mirandilla Catherine C. Glorioso Josua Royce S. RuzolRonald Andrei DaguioAinda não há avaliações
- Polyolefin FoamsDocumento149 páginasPolyolefin FoamsAlexey GuskovAinda não há avaliações
- Approved Supplier of IFR For IOCL Solapur Tender.Documento2 páginasApproved Supplier of IFR For IOCL Solapur Tender.rohitAinda não há avaliações
- E SN752Documento3 páginasE SN752hasan_676489616Ainda não há avaliações
- 01 Samss 048 PDFDocumento21 páginas01 Samss 048 PDFMohamed SolimanAinda não há avaliações
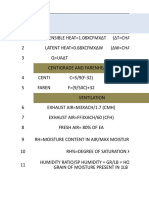
- All Formulas HvacDocumento11 páginasAll Formulas HvacrockAinda não há avaliações
- MFC Hubli Final Bill Jan 2013Documento12 páginasMFC Hubli Final Bill Jan 2013Nagaraj PatilAinda não há avaliações
- TMMDocumento21 páginasTMMAkash LohiAinda não há avaliações
- 2.1 Testing MachineDocumento3 páginas2.1 Testing MachinekoushipriyathamAinda não há avaliações
- PetroSync - API 571 Damage Mechanism Affecting Fixed Equipment in The Refining Industry 2017Documento9 páginasPetroSync - API 571 Damage Mechanism Affecting Fixed Equipment in The Refining Industry 2017Gonzalo TelleríaAinda não há avaliações
- Ppe Coverall FinalDocumento33 páginasPpe Coverall FinalNJ enterpriseAinda não há avaliações
- 6 Retaining WallsDocumento18 páginas6 Retaining Wallsumit2699Ainda não há avaliações
- Pipe Standrad ASTMDocumento4 páginasPipe Standrad ASTMTrà Nguyễn100% (1)