Você também pode gostar
- Canny Edge Detector: Unveiling the Art of Visual PerceptionNo EverandCanny Edge Detector: Unveiling the Art of Visual PerceptionAinda não há avaliações
- Tone Mapping: Tone Mapping: Illuminating Perspectives in Computer VisionNo EverandTone Mapping: Tone Mapping: Illuminating Perspectives in Computer VisionAinda não há avaliações
- Edge Detection PDFDocumento12 páginasEdge Detection PDFchaithra580Ainda não há avaliações
- Edge Detection ProjectDocumento22 páginasEdge Detection ProjectJenish Macwan100% (1)
- Multipass Bilateral Filter - CartoonizerDocumento18 páginasMultipass Bilateral Filter - CartoonizerNikhil Wakalkar100% (1)
- Use Map EstimationFor Image SharpeningDocumento4 páginasUse Map EstimationFor Image SharpeningInternational Organization of Scientific Research (IOSR)Ainda não há avaliações
- Final Lab ReportDocumento7 páginasFinal Lab ReportSyed Hasib1971 AbdullahAinda não há avaliações
- Dynamic Resolution of Image Edge Detection Technique Among Sobel, Log, and Canny AlgorithmsDocumento5 páginasDynamic Resolution of Image Edge Detection Technique Among Sobel, Log, and Canny AlgorithmsijsretAinda não há avaliações
- Roberts Edge DetectorDocumento7 páginasRoberts Edge DetectorNaser MahmoudiAinda não há avaliações
- Algorithms For Edge DetectionDocumento17 páginasAlgorithms For Edge DetectionSudipta RoyAinda não há avaliações
- Algorithms For Edge Detection: Srikanth Rangarajan 105210122Documento17 páginasAlgorithms For Edge Detection: Srikanth Rangarajan 105210122dgonlineAinda não há avaliações
- Edge Detection Sobel De2 AlteraDocumento4 páginasEdge Detection Sobel De2 AlteraParam UttarwarAinda não há avaliações
- Image Filtering: A Comprehensive StudyDocumento46 páginasImage Filtering: A Comprehensive StudyMurali YanamandalaAinda não há avaliações
- Gradient OperatorDocumento5 páginasGradient Operatorchaithra580Ainda não há avaliações
- Robust Face Recognition Under Difficult Lighting ConditionsDocumento4 páginasRobust Face Recognition Under Difficult Lighting ConditionsijecctAinda não há avaliações
- Study and Comparison of Various Image EdDocumento12 páginasStudy and Comparison of Various Image EdSharmin SathiAinda não há avaliações
- Experiment 5: DigitalDocumento3 páginasExperiment 5: DigitalSwarali PurandareAinda não há avaliações
- Implementation of Medical Image Fusion Using DWT Process On FPGADocumento4 páginasImplementation of Medical Image Fusion Using DWT Process On FPGAATSAinda não há avaliações
- Council For Innovative Research: An Advanced Neural Network Based Method For Noise Removal and Edge DetectionDocumento6 páginasCouncil For Innovative Research: An Advanced Neural Network Based Method For Noise Removal and Edge DetectionMay Thet TunAinda não há avaliações
- 7 IP Expt Smooth Spatial Domain FilteringDocumento4 páginas7 IP Expt Smooth Spatial Domain FilteringsamarthAinda não há avaliações
- Assignment-2:DIP: Mr. Victor Mageto CP10101610245Documento10 páginasAssignment-2:DIP: Mr. Victor Mageto CP10101610245Vijayendravarma DanduAinda não há avaliações
- Hardware Implementation of Image Processing Algorithms On FPGADocumento4 páginasHardware Implementation of Image Processing Algorithms On FPGAYogeshwar nath singhAinda não há avaliações
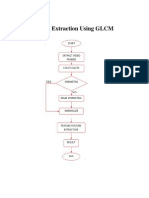
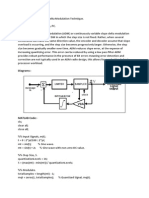
- Feature Extraction Using GLCM (Mamography)Documento3 páginasFeature Extraction Using GLCM (Mamography)him1234567890Ainda não há avaliações
- Comparison of Edge Detectors: Ayaz Akram, Asad IsmailDocumento9 páginasComparison of Edge Detectors: Ayaz Akram, Asad IsmailRamSharmaAinda não há avaliações
- Ijettcs 2014 10 14 66 PDFDocumento4 páginasIjettcs 2014 10 14 66 PDFInternational Journal of Application or Innovation in Engineering & ManagementAinda não há avaliações
- A Survey On Edge Detection Using Different Techniques: Volume 2, Issue 4, April 2013Documento5 páginasA Survey On Edge Detection Using Different Techniques: Volume 2, Issue 4, April 2013International Journal of Application or Innovation in Engineering & ManagementAinda não há avaliações
- Fast Image Blurring Using Lookup Table For RealDocumento6 páginasFast Image Blurring Using Lookup Table For RealhimanshubhimaniAinda não há avaliações
- Sesion 9 10 EdgeDocumento12 páginasSesion 9 10 Edgeswarna kuchibhotlaAinda não há avaliações
- Implementation of Gabor Filter On FPGADocumento5 páginasImplementation of Gabor Filter On FPGAfaruk1991Ainda não há avaliações
- Explain Following Morphological Methods With ExamplesDocumento20 páginasExplain Following Morphological Methods With ExamplesMadhawa HulangamuwaAinda não há avaliações
- CAED Project PDFDocumento5 páginasCAED Project PDFUsama AameerAinda não há avaliações
- Asift AsiftDocumento11 páginasAsift AsiftHaris MasoodAinda não há avaliações
- Watershed Image Segmentation Based On Nonlinear Combination Morphology FilterDocumento4 páginasWatershed Image Segmentation Based On Nonlinear Combination Morphology FilterherusyahputraAinda não há avaliações
- Optimized Edge Detection Algorithm For Face RecognitionDocumento4 páginasOptimized Edge Detection Algorithm For Face RecognitionbarkingsimonAinda não há avaliações
- Contrast Enhancement and Bit Plane SlicingDocumento9 páginasContrast Enhancement and Bit Plane SlicingGourab PalAinda não há avaliações
- Compusoft, 3 (7), 1024-1029 PDFDocumento6 páginasCompusoft, 3 (7), 1024-1029 PDFIjact EditorAinda não há avaliações
- Guided FilterDocumento14 páginasGuided Filteroscar saiguaAinda não há avaliações
- Xilinx System Generator PDFDocumento15 páginasXilinx System Generator PDFDr-Atul Kumar DwivediAinda não há avaliações
- Research On Wavelet Image Threshold De-Noising: Chenggang Zhen Yingmei SuDocumento4 páginasResearch On Wavelet Image Threshold De-Noising: Chenggang Zhen Yingmei SujebileeAinda não há avaliações
- Image Compression Using DCTDocumento10 páginasImage Compression Using DCTSivaranjan Goswami100% (1)
- Problem Statement 40Documento8 páginasProblem Statement 40Let see With positiveAinda não há avaliações
- Edge Detectors: Deptofcs& EDocumento26 páginasEdge Detectors: Deptofcs& Eishant7890Ainda não há avaliações
- Image Coding ZeroDocumento28 páginasImage Coding Zeropraveenpv7Ainda não há avaliações
- DSP Exp 10 StudentDocumento4 páginasDSP Exp 10 StudentCaptain Jack SparrowAinda não há avaliações
- Homomorphic FilteringDocumento5 páginasHomomorphic Filteringadc gamblAinda não há avaliações
- Improved Edge Detection Using Variable Thresholding Technique and Convolution of Gabor With Gaussian FiltersDocumento15 páginasImproved Edge Detection Using Variable Thresholding Technique and Convolution of Gabor With Gaussian FilterssipijAinda não há avaliações
- International Journal of Image Processing (IJIP)Documento65 páginasInternational Journal of Image Processing (IJIP)AI Coordinator - CSC JournalsAinda não há avaliações
- Design and Implementation: 3.1 MorphologyDocumento29 páginasDesign and Implementation: 3.1 Morphologyvijay bAinda não há avaliações
- Robot Vision, Image Processing and Analysis: Sumit Mane (162110017) Akhilesh Gupta (162110001) Kunal Karnik (162110013)Documento69 páginasRobot Vision, Image Processing and Analysis: Sumit Mane (162110017) Akhilesh Gupta (162110001) Kunal Karnik (162110013)Sanjay DolareAinda não há avaliações
- Final Project Report: Author: Ying Li Course: Computer For Imaging ScienceDocumento23 páginasFinal Project Report: Author: Ying Li Course: Computer For Imaging ScienceZulqarnain HaiderAinda não há avaliações
- Varied-Sphere Periphery-Sentient Twin UtilizationDocumento4 páginasVaried-Sphere Periphery-Sentient Twin UtilizationInternational Journal of Application or Innovation in Engineering & ManagementAinda não há avaliações
- 05.an Improved Segmentation of High Spatial Resolution Remote Sensing ImageDocumento5 páginas05.an Improved Segmentation of High Spatial Resolution Remote Sensing ImagebudiAinda não há avaliações
- Paper 3Documento11 páginasPaper 3irjmssAinda não há avaliações
- 022 BolecekDocumento8 páginas022 BolecekIEEE Projects BengaluruAinda não há avaliações
- DSP Project ExampleDocumento24 páginasDSP Project ExampleAMIT KUMAR PANDAAinda não há avaliações
- A Fast Image Sharpness Algorithm ImplementationDocumento6 páginasA Fast Image Sharpness Algorithm ImplementationijosatAinda não há avaliações
- Iterated Graph Cuts For Image SegmentationDocumento10 páginasIterated Graph Cuts For Image Segmentationankit407Ainda não há avaliações
- Object Detection and Shadow Removal From Video StreamDocumento10 páginasObject Detection and Shadow Removal From Video StreamPaolo PinoAinda não há avaliações
- Gabor FilterDocumento9 páginasGabor Filterjohn_puppy31100% (1)
- DWT SpihtDocumento8 páginasDWT SpihtPavan GaneshAinda não há avaliações
- A Simple Explanation of Effective Asset Management: Senior Asset & Engineering Consultant IngeniaDocumento16 páginasA Simple Explanation of Effective Asset Management: Senior Asset & Engineering Consultant IngeniaZeeshan Hyder BhattiAinda não há avaliações
- Business Process Reengineering Critical PDFDocumento19 páginasBusiness Process Reengineering Critical PDFadambg88100% (1)
- Business Process Reengineering On High Education Institutions - An Integrative Approach of Enterprise Architecture and Service Design MethodsDocumento120 páginasBusiness Process Reengineering On High Education Institutions - An Integrative Approach of Enterprise Architecture and Service Design MethodsZeeshan Hyder BhattiAinda não há avaliações
- A1f03paper 5Documento16 páginasA1f03paper 5Zeeshan Hyder BhattiAinda não há avaliações
- Research On Process Reengineering of University Financial System Based On "Big Data" + "Cloud Computing"Documento6 páginasResearch On Process Reengineering of University Financial System Based On "Big Data" + "Cloud Computing"Zeeshan Hyder BhattiAinda não há avaliações
- Ajmse20187 2-13Documento9 páginasAjmse20187 2-13Zeeshan Hyder BhattiAinda não há avaliações
- Re-Engineering As The Process of Business AdaptationsDocumento8 páginasRe-Engineering As The Process of Business AdaptationsZeeshan Hyder BhattiAinda não há avaliações
- Mixed Methods in Finance ResearchDocumento30 páginasMixed Methods in Finance ResearchZeeshan Hyder BhattiAinda não há avaliações
- PC Shortcut Keys For Special CharactersDocumento2 páginasPC Shortcut Keys For Special CharactersJoyt MittalAinda não há avaliações
- Business Process Portfolio Selection in Re-Engineering ProjectsDocumento25 páginasBusiness Process Portfolio Selection in Re-Engineering ProjectsZeeshan Hyder BhattiAinda não há avaliações
- Support Processes 1Documento9 páginasSupport Processes 1Michael SenkaleAinda não há avaliações
- University of Sindh Internal Departmental Audit Schedule 2020Documento4 páginasUniversity of Sindh Internal Departmental Audit Schedule 2020Zeeshan Hyder BhattiAinda não há avaliações
- Quantitative and Qualitative Research in FinanceDocumento18 páginasQuantitative and Qualitative Research in FinanceZeeshan Hyder BhattiAinda não há avaliações
- Frameworks For Understanding Business Process Re-EngineeringDocumento13 páginasFrameworks For Understanding Business Process Re-EngineeringZeeshan Hyder BhattiAinda não há avaliações
- ProformaDocumento2 páginasProformaZeeshan Hyder BhattiAinda não há avaliações
- S.No. Items Qty Voltage Current Total Power Factor Power (Watt)Documento1 páginaS.No. Items Qty Voltage Current Total Power Factor Power (Watt)Zeeshan Hyder BhattiAinda não há avaliações
- Excel 2016 Vba ProgrammingDocumento118 páginasExcel 2016 Vba ProgrammingZeeshan Hyder Bhatti67% (3)
- New Text DocumentDocumento9 páginasNew Text DocumentZeeshan Hyder BhattiAinda não há avaliações
- Employee Payroll System ProjectDocumento21 páginasEmployee Payroll System ProjectZeeshan Hyder BhattiAinda não há avaliações
- Frameworks For Understanding Business Process Re-EngineeringDocumento13 páginasFrameworks For Understanding Business Process Re-EngineeringZeeshan Hyder BhattiAinda não há avaliações
- Revised Budqet ForDocumento4 páginasRevised Budqet ForZeeshan Hyder BhattiAinda não há avaliações
- Monthly Blood Pressure Log Excel TemplateDocumento8 páginasMonthly Blood Pressure Log Excel TemplateZeeshan Hyder Bhatti100% (1)
- Monthly Blood Sugar Log Excel Template: Personal InformationDocumento5 páginasMonthly Blood Sugar Log Excel Template: Personal InformationZeeshan Hyder BhattiAinda não há avaliações
- Business Process Portfolio Selection in Re-Engineering ProjectsDocumento25 páginasBusiness Process Portfolio Selection in Re-Engineering ProjectsZeeshan Hyder BhattiAinda não há avaliações
- Employee Payroll System ProjectDocumento21 páginasEmployee Payroll System ProjectZeeshan Hyder BhattiAinda não há avaliações
- An Overview of Sociology As A Discipline in Pakistan: Challenges and OpportunitiesDocumento15 páginasAn Overview of Sociology As A Discipline in Pakistan: Challenges and OpportunitiesZeeshan Hyder BhattiAinda não há avaliações
- University of Sindh Internal Departmental Audit Schedule 2020Documento4 páginasUniversity of Sindh Internal Departmental Audit Schedule 2020Zeeshan Hyder BhattiAinda não há avaliações
- 2001 Shsop 0131Documento18 páginas2001 Shsop 0131Zeeshan Hyder BhattiAinda não há avaliações
- M.A Thesis Title: S. # Researcher Title YearDocumento4 páginasM.A Thesis Title: S. # Researcher Title YearZeeshan Hyder BhattiAinda não há avaliações
- Sociology As A Discipline in Pakistan: Challenges and OpportunitiesDocumento27 páginasSociology As A Discipline in Pakistan: Challenges and OpportunitiesZeeshan Hyder BhattiAinda não há avaliações
- Mth500 Tetra Portable Radio Detailed Service Manual: R1:380-400 MHZ (Pt811F)Documento148 páginasMth500 Tetra Portable Radio Detailed Service Manual: R1:380-400 MHZ (Pt811F)nokiaman2002Ainda não há avaliações
- Dec 2019 CS463 - Digital Image Processing (R&S) - Ktu QbankDocumento2 páginasDec 2019 CS463 - Digital Image Processing (R&S) - Ktu QbankPurusottam PandeyAinda não há avaliações
- EC202 Signals & SystemsDocumento3 páginasEC202 Signals & Systemsanupvasu0% (1)
- AdbspDocumento146 páginasAdbspKumar GauravAinda não há avaliações
- IEGAN: Multi-Purpose Perceptual Quality Image Enhancement Using Generative Adversarial NetworkDocumento10 páginasIEGAN: Multi-Purpose Perceptual Quality Image Enhancement Using Generative Adversarial NetworkconnectsoumyaAinda não há avaliações
- Project Proposal Outline For DSP 123Documento2 páginasProject Proposal Outline For DSP 123Lingeshgugan SanmugamAinda não há avaliações
- Session 5Documento16 páginasSession 5Noorullah ShariffAinda não há avaliações
- EE201A Presentation: Memory Addressing Organization For Stream-Based Reconfigurable ComputingDocumento33 páginasEE201A Presentation: Memory Addressing Organization For Stream-Based Reconfigurable ComputingAsaph AbrahamAinda não há avaliações
- Adaptive Delta ModulationDocumento4 páginasAdaptive Delta Modulationhanishsingla0241Ainda não há avaliações
- HelpDocumento14 páginasHelpAndres BelloAinda não há avaliações
- Digital Signal Processing Iii Year Ece B Introduction To DSPDocumento38 páginasDigital Signal Processing Iii Year Ece B Introduction To DSPKavitha SubramaniamAinda não há avaliações
- DSP Lab Report # 04Documento23 páginasDSP Lab Report # 04Abdul BasitAinda não há avaliações
- Signal Processing For MechatronicsDocumento30 páginasSignal Processing For Mechatronicsgkarthikeyan100% (2)
- Lab Based Project ReportDocumento40 páginasLab Based Project ReportNagulmeera ShaikAinda não há avaliações
- 3-2 Syllabus (1) - MergedDocumento14 páginas3-2 Syllabus (1) - Mergededucational9hubAinda não há avaliações
- Olea PackagesDocumento1 páginaOlea Packagesmaha jamoukhaAinda não há avaliações
- 8 Kundur Overlap Save AddDocumento15 páginas8 Kundur Overlap Save Adddearprasanta6015Ainda não há avaliações
- Application of Permanent Magnet Bias Magnetic Bearings To An Energy Storage FlywheelDocumento15 páginasApplication of Permanent Magnet Bias Magnetic Bearings To An Energy Storage FlywheelmivanoAinda não há avaliações
- Pyramid and Pyramid BlendingDocumento8 páginasPyramid and Pyramid Blendingyamiewon100% (1)
- ADE9000Documento73 páginasADE9000Toni BioscaAinda não há avaliações
- Speech Signals ProcessingDocumento7 páginasSpeech Signals Processingقرين لطفيAinda não há avaliações
- Electronics Circuit Theory and Telecommunication EngineeringDocumento2 páginasElectronics Circuit Theory and Telecommunication EngineeringluthfiAinda não há avaliações
- WolaDocumento51 páginasWolaSidharth MahotraAinda não há avaliações
- Image Enhancement TechniquesDocumento15 páginasImage Enhancement TechniquesLaxman SelvaaAinda não há avaliações
- Design and Experimental Evaluation of A Time-Interleaved ADC Calibration Algorithm For Application in High-Speed Communication SystemsDocumento12 páginasDesign and Experimental Evaluation of A Time-Interleaved ADC Calibration Algorithm For Application in High-Speed Communication SystemsRahul ShandilyaAinda não há avaliações
- Question Paper Code:: Reg. No.Documento4 páginasQuestion Paper Code:: Reg. No.Varun RithvikAinda não há avaliações
- DSP Lab 1 - 03Documento63 páginasDSP Lab 1 - 03Abdul BasitAinda não há avaliações
- Adc Dac ReportDocumento6 páginasAdc Dac ReportatgAinda não há avaliações
- Fpga Based L-Band Pulse Doppler RadarDocumento71 páginasFpga Based L-Band Pulse Doppler Radarmcanali100% (1)
- Fixed Point Signal Processing by W PaddgetDocumento133 páginasFixed Point Signal Processing by W Paddgettest mail100% (1)