Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Aircraft MaintenanceDocumento207 páginasAircraft MaintenanceSenthil Kumar100% (1)
- Review of Related Literature of Jackfruit SeedDocumento4 páginasReview of Related Literature of Jackfruit SeedPrince Martin John Villamor80% (5)
- Skyrim Potions GuideDocumento26 páginasSkyrim Potions GuideMarkinhos RuviaroAinda não há avaliações
- Two DOF SystemsDocumento67 páginasTwo DOF SystemsSrinath Gudur100% (1)
- TRALEG KYABGON - The-Influence-of-Yogacara-on-Mahamudra PDFDocumento145 páginasTRALEG KYABGON - The-Influence-of-Yogacara-on-Mahamudra PDFFilippo Lunardo100% (1)
- Biology 5th Brooker Test BankDocumento34 páginasBiology 5th Brooker Test BankRamiqq67% (3)
- Group 9 Caught in Between Modern and Contemporary ArtDocumento12 páginasGroup 9 Caught in Between Modern and Contemporary Artlen lenAinda não há avaliações
- Montacarga Toyota 8FG 8FDDocumento24 páginasMontacarga Toyota 8FG 8FDGyogi Mitsuta100% (1)
- Scada On Hydro Power Plant Cascade - Case StudyDocumento49 páginasScada On Hydro Power Plant Cascade - Case StudyRaju KumarAinda não há avaliações
- What Is Learning Anyway? A Topographical Perspective ConsideredDocumento18 páginasWhat Is Learning Anyway? A Topographical Perspective ConsideredCristian SalazarAinda não há avaliações
- Table II - HS Correlation 2017 To 2022Documento24 páginasTable II - HS Correlation 2017 To 2022SyahrulFitraAinda não há avaliações
- AutoCAD Assembly DrawingDocumento1 páginaAutoCAD Assembly DrawingSyahrulFitraAinda não há avaliações
- TrackerDocumento1 páginaTrackerSyahrulFitraAinda não há avaliações
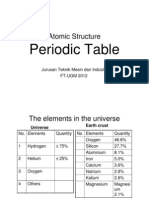
- 03 Atomic Structure 2012Documento34 páginas03 Atomic Structure 2012Falakh Al-JazariAinda não há avaliações
- An Observational Report of Intensive Robotic and Manual Gait Training in Sub Acute StrokeDocumento10 páginasAn Observational Report of Intensive Robotic and Manual Gait Training in Sub Acute StrokeSyahrulFitraAinda não há avaliações
- Stroke 101 Fact SheetDocumento4 páginasStroke 101 Fact SheetSyahrulFitraAinda não há avaliações
- 63-2003 Local Water District Franchise and Income TaxDocumento2 páginas63-2003 Local Water District Franchise and Income Taxapi-247793055100% (1)
- EM-PM Hybrid Maglev Conveyor SimulationDocumento7 páginasEM-PM Hybrid Maglev Conveyor SimulationLalbahadur MajhiAinda não há avaliações
- Report of Mechanics of Machines 1Documento12 páginasReport of Mechanics of Machines 1muhammaduzairAinda não há avaliações
- Aqua Regia - WikipediaDocumento5 páginasAqua Regia - WikipediaearthplightAinda não há avaliações
- Mango ratnagiri reportDocumento4 páginasMango ratnagiri reportHarsh BhattAinda não há avaliações
- Analysis of Caffeine Content in Kola Acuminate and Kola NitidaDocumento50 páginasAnalysis of Caffeine Content in Kola Acuminate and Kola Nitidaebuka100% (1)
- Report on internship at JDS TransformersDocumento50 páginasReport on internship at JDS TransformersSachinAinda não há avaliações
- Effect of Heat Treatment On Curcuminoid, Colour Value and Total Polyphenols of Fresh Turmeric RhizomeDocumento8 páginasEffect of Heat Treatment On Curcuminoid, Colour Value and Total Polyphenols of Fresh Turmeric RhizomeMuhammad Maulana SidikAinda não há avaliações
- Crude Fiber Lab ReportDocumento10 páginasCrude Fiber Lab ReportNurbatrisyia NawiAinda não há avaliações
- MM 361: Advanced Manufacturing: InstructionsDocumento3 páginasMM 361: Advanced Manufacturing: InstructionsSimLo Lulumani Ko'osiko Taloanimae'aAinda não há avaliações
- KS1 A Good Bubbling CauldronDocumento11 páginasKS1 A Good Bubbling CauldronViktoriia PolushkoAinda não há avaliações
- Adime NoteDocumento2 páginasAdime Noteapi-384503305100% (1)
- Complete Blood Count (CBC) Normal Laboratory Study Values: DefinitionDocumento6 páginasComplete Blood Count (CBC) Normal Laboratory Study Values: DefinitionGlare RhayneAinda não há avaliações
- Mil STD 785BDocumento90 páginasMil STD 785BLaura Encinas EscobarAinda não há avaliações
- MCA-12 Web DesigningDocumento204 páginasMCA-12 Web DesigningLittaAinda não há avaliações
- trs5 Key Cho Cac BanDocumento35 páginastrs5 Key Cho Cac BanNguyệt NgôAinda não há avaliações
- Hydrolysis of Lactose in Whey Permeate For Subsequent Fermentation To EthanolDocumento13 páginasHydrolysis of Lactose in Whey Permeate For Subsequent Fermentation To EthanolkaltoumAinda não há avaliações
- ACS560 Drives (0.75 To 160 KW, 1.0 To 215 HP) : Hardware ManualDocumento164 páginasACS560 Drives (0.75 To 160 KW, 1.0 To 215 HP) : Hardware ManualNutan PowerAinda não há avaliações
- Seating Arrangement Rani MamDocumento44 páginasSeating Arrangement Rani Mamnagendra thelagariAinda não há avaliações
- Engineering Declaration Unit # 2 JindalDocumento16 páginasEngineering Declaration Unit # 2 JindalVIBHAV100% (1)
- Leadership Theory Application and Skill Development 5th Edition Lussier Test Bank 1Documento36 páginasLeadership Theory Application and Skill Development 5th Edition Lussier Test Bank 1douglasbrownyipsmrgkob100% (29)
- Lumino - HTLSDocumento11 páginasLumino - HTLSvishnu ojhaAinda não há avaliações