Você também pode gostar
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Vapor Liquid Equilibrium in Extractive Distillation of The Acetone/Methanol System Using Water As Entrainer and Pressure..Documento9 páginasVapor Liquid Equilibrium in Extractive Distillation of The Acetone/Methanol System Using Water As Entrainer and Pressure..Cordero JulioAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- Sulzer Structured Packings PDFDocumento28 páginasSulzer Structured Packings PDFCordero JulioAinda não há avaliações
- Koch GlitschDocumento36 páginasKoch Glitschdeepanagha100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- GEA Atlas Pilot Freeze Drying Plant PDFDocumento2 páginasGEA Atlas Pilot Freeze Drying Plant PDFCordero JulioAinda não há avaliações
- Bakker Gates Chemical Engineering ProgressDocumento11 páginasBakker Gates Chemical Engineering ProgressCordero JulioAinda não há avaliações
- 54 Ashrae Psychrometric Chart #01 PDFDocumento2 páginas54 Ashrae Psychrometric Chart #01 PDFCordero Julio0% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- GEA Atlas Pilot Freeze Drying PlantDocumento2 páginasGEA Atlas Pilot Freeze Drying PlantCordero Julio100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Ultrafiltration TechnologiesDocumento18 páginasUltrafiltration TechnologiesCordero Julio100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Application of Cross-Flow Ultrafiltration On Inorganic Membranes in Purification of Food MaterialsDocumento8 páginasApplication of Cross-Flow Ultrafiltration On Inorganic Membranes in Purification of Food MaterialsCordero JulioAinda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
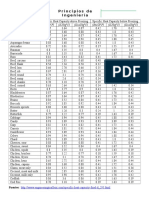
- 22 Calores Especificos de Algunos AlimentosDocumento6 páginas22 Calores Especificos de Algunos AlimentosCordero JulioAinda não há avaliações
- Marcel Mulder Basic Principles of Membrane Technology, 2nd EdDocumento577 páginasMarcel Mulder Basic Principles of Membrane Technology, 2nd EdCordero Julio100% (3)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Technical Drafting I: (Manual Drafting) 2Nd SemesterDocumento18 páginasTechnical Drafting I: (Manual Drafting) 2Nd SemesterhakkensAinda não há avaliações
- Cad and Dog 2Documento5 páginasCad and Dog 2Muhammad RifaiAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- BB Conduction-and-ConvectionDocumento13 páginasBB Conduction-and-ConvectionRamon LlonaAinda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Tachi e 2004Documento12 páginasTachi e 2004Ahsan Habib TanimAinda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Smart Four Channel Highside Power Switch: BTS711L1Documento17 páginasSmart Four Channel Highside Power Switch: BTS711L1Giapy Phuc TranAinda não há avaliações
- Calflo Heat Transfer Fluids Tech DataDocumento4 páginasCalflo Heat Transfer Fluids Tech DataKhaled ElsayedAinda não há avaliações
- Os Module1Documento37 páginasOs Module1lingaraj_superstarAinda não há avaliações
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Solids Induced Pack-Off Packing Off - First ActionsDocumento4 páginasSolids Induced Pack-Off Packing Off - First ActionsBhagwal TravelsAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- ISUOG Basic Training: Fetal Biometry - Dating, Assessing Size & Estimating Fetal WeightDocumento33 páginasISUOG Basic Training: Fetal Biometry - Dating, Assessing Size & Estimating Fetal WeightRolando DiazAinda não há avaliações
- Sequencing Problems 1Documento24 páginasSequencing Problems 1Div SavaliyaAinda não há avaliações
- Quarter 1 Week 1Documento6 páginasQuarter 1 Week 1GhghaaaAinda não há avaliações
- Tesis de Pared de BloquesDocumento230 páginasTesis de Pared de BloquesRobert FinqAinda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- How To Design 3D Games With Web Technolology - Book 01. Three - Js - HTML5 and WebGL (PDFDrive)Documento184 páginasHow To Design 3D Games With Web Technolology - Book 01. Three - Js - HTML5 and WebGL (PDFDrive)van ninhAinda não há avaliações
- Power Electronics Circuits Devices and Applications by Muhammad H RashidDocumento602 páginasPower Electronics Circuits Devices and Applications by Muhammad H RashidSuhas K Sri SaiAinda não há avaliações
- Siggberg WartsilaDocumento27 páginasSiggberg WartsilaSenthil KumarAinda não há avaliações
- Boiler Efficiency R K JainDocumento28 páginasBoiler Efficiency R K JainPriyesh KumarAinda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Inductiveand Deductive Reasoning in Geometry October 27 2022Documento9 páginasInductiveand Deductive Reasoning in Geometry October 27 2022Seif DelawarAinda não há avaliações
- Stereological Study of Kidney in Streptozotocin-Induced Diabetic Mice Treated With Ethanolic Extract of Stevia Rebaudiana (Bitter Fraction)Documento10 páginasStereological Study of Kidney in Streptozotocin-Induced Diabetic Mice Treated With Ethanolic Extract of Stevia Rebaudiana (Bitter Fraction)Fenny Noor AidaAinda não há avaliações
- Sr. Grand Test Key and HintsDocumento7 páginasSr. Grand Test Key and HintsM JEEVARATHNAM NAIDUAinda não há avaliações
- 9011 VW Rebar Strainmeter (E)Documento2 páginas9011 VW Rebar Strainmeter (E)JasonAinda não há avaliações
- Student Personal Prescriptive Path 2Documento29 páginasStudent Personal Prescriptive Path 2api-377332228Ainda não há avaliações
- Cbse - Department of Skill Education Curriculum For Session 2021-2022Documento13 páginasCbse - Department of Skill Education Curriculum For Session 2021-2022Dushyant SinghAinda não há avaliações
- INOI 2012 Question PaperDocumento6 páginasINOI 2012 Question PaperShourya BoseAinda não há avaliações
- User AgentDocumento2 páginasUser AgenthuongAinda não há avaliações
- An Experimental and Statistical Study of Olfactory PreferencesDocumento7 páginasAn Experimental and Statistical Study of Olfactory Preferencesjungseong parkAinda não há avaliações
- Dke672 ch2Documento44 páginasDke672 ch2Siraj MohammedAinda não há avaliações
- Ha400 PDFDocumento1 páginaHa400 PDFZacharias Pavlos50% (2)
- Tautology and ContradictionDocumento10 páginasTautology and ContradictionChristine Tan0% (1)
- Homework # 4:: Hazard Analysis, Groundmotion, Response Spectrum and Nonlinear ResponseDocumento2 páginasHomework # 4:: Hazard Analysis, Groundmotion, Response Spectrum and Nonlinear ResponseAbhinavAinda não há avaliações
- Danas Si Moja I BozijaDocumento1 páginaDanas Si Moja I BozijaMoj DikoAinda não há avaliações