Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- ShishirMathur 12669 CodeNation ResumeDocumento2 páginasShishirMathur 12669 CodeNation ResumeNathan RodgersAinda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- d2 Impact That File Formats Compression Techniques Image Resolution and Colour Depth Have On File Size and Image QualityDocumento6 páginasd2 Impact That File Formats Compression Techniques Image Resolution and Colour Depth Have On File Size and Image Qualityapi-300823967Ainda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Ray Tracing Idea: CS 465 Lecture 3Documento7 páginasRay Tracing Idea: CS 465 Lecture 3Major MetcalfAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (894)
- Computer Programming (C) Lab ManualDocumento66 páginasComputer Programming (C) Lab ManualwasiAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Multi Tenancy Rails PDFDocumento162 páginasMulti Tenancy Rails PDFgilaniali346850% (2)
- NetScaler 10.5 HTTP CalloutsDocumento45 páginasNetScaler 10.5 HTTP CalloutssudharaghavanAinda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- CSC112 Algorithms and Data Structures GuideDocumento96 páginasCSC112 Algorithms and Data Structures GuideVidit Kumar100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Glade TutorialDocumento5 páginasGlade TutorialRey Marc ParedesAinda não há avaliações
- Graphics and Image Data RepresentationsDocumento46 páginasGraphics and Image Data RepresentationsbobbbuilderAinda não há avaliações
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- File Transfer Using TCPDocumento4 páginasFile Transfer Using TCPArockiaruby RubyAinda não há avaliações
- WCF OData PDFDocumento267 páginasWCF OData PDFJacinto Aissa IbañezAinda não há avaliações
- Using A PC's RS-232 Serial Port To Communicate With 2-Wire DevicesDocumento10 páginasUsing A PC's RS-232 Serial Port To Communicate With 2-Wire DevicesAntonio RondinelliAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- (WWW - Entrance-Exam - Net) - DOEACC B Level-Network Management & Information Security Sample Paper 1Documento2 páginas(WWW - Entrance-Exam - Net) - DOEACC B Level-Network Management & Information Security Sample Paper 1DEBLEENA VIJAYAinda não há avaliações
- Test PDFDocumento4 páginasTest PDFsupreethAinda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Agile Project ManagementDocumento4 páginasAgile Project ManagementMani SelvanAinda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Network and Distributed OSDocumento5 páginasNetwork and Distributed OSSarfaraz EdrishAinda não há avaliações
- IprocessDocumento293 páginasIprocessSiwa Karthikeya AmbatiAinda não há avaliações
- Hs Windows InstallDocumento203 páginasHs Windows InstallSagar Reddy KAinda não há avaliações
- QUANTITATIVE MANAGEMENT ASSIGNMENT MODELDocumento2 páginasQUANTITATIVE MANAGEMENT ASSIGNMENT MODELMervin PerezAinda não há avaliações
- Fingerprint Recognition Using MATLAB PDFDocumento74 páginasFingerprint Recognition Using MATLAB PDFshakil0% (1)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
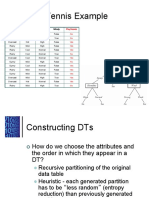
- Play Tennis Example: Outlook Temperature Humidity WindyDocumento29 páginasPlay Tennis Example: Outlook Temperature Humidity Windyioi123Ainda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- jBASE ToolsDocumento88 páginasjBASE ToolsGbadamosi OluwatosinAinda não há avaliações
- Assignment 2Documento6 páginasAssignment 2PunithRossiAinda não há avaliações
- Hack SheetDocumento3 páginasHack SheetHarrison WangAinda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Multi ThreadingDocumento3 páginasMulti Threadingbat autoAinda não há avaliações
- A. B. C. D. E. The Answer Cannot Be Determined From The Information GivenDocumento4 páginasA. B. C. D. E. The Answer Cannot Be Determined From The Information GivenJohnOlayAinda não há avaliações
- Airline Reservation SystemDocumento66 páginasAirline Reservation SystemcharmivoraAinda não há avaliações
- Yousif Et Al-2019-Ecology and EvolutionDocumento12 páginasYousif Et Al-2019-Ecology and EvolutionJulián Ortega Jr.Ainda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Application for Destiny ICT Solutions PLCDocumento5 páginasApplication for Destiny ICT Solutions PLCDagmawit Terefe100% (1)
- Marking SchemeDocumento21 páginasMarking Schemeultraman2928Ainda não há avaliações