Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Bitcoin Price Prediction 5 - ColaboratoryDocumento5 páginasBitcoin Price Prediction 5 - ColaboratorySisay ADAinda não há avaliações
- April 16th Presentation-JSDocumento7 páginasApril 16th Presentation-JSSisay ADAinda não há avaliações
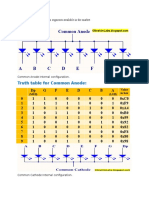
- Truth Table For Common AnodeDocumento3 páginasTruth Table For Common AnodeSisay ADAinda não há avaliações
- Chap. 5 Basic Computer Org. and Design: 5-1 Instruction CodesDocumento21 páginasChap. 5 Basic Computer Org. and Design: 5-1 Instruction CodesSisay ADAinda não há avaliações
- Chapter OneDocumento27 páginasChapter OneSisay ADAinda não há avaliações
- Advanced Design For Robot in Mars ExplorationDocumento6 páginasAdvanced Design For Robot in Mars ExplorationSisay ADAinda não há avaliações
- Interface LCD and Keypad With 8051 MicroDocumento7 páginasInterface LCD and Keypad With 8051 MicroSisay ADAinda não há avaliações
- FishggDocumento63 páginasFishggSisay ADAinda não há avaliações
- Introduction To Artificial Intelligence: By: Getaneh TDocumento55 páginasIntroduction To Artificial Intelligence: By: Getaneh TSisay ADAinda não há avaliações
- Office2007 Excel TrainfffingDocumento65 páginasOffice2007 Excel TrainfffingSisay ADAinda não há avaliações
- 0 BBDocumento6 páginas0 BBSisay ADAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- XFLR5 Mode MeasurementsDocumento17 páginasXFLR5 Mode MeasurementsAnirudh ShenoyAinda não há avaliações
- EE301 Lesson 13 Intro To AC SinusoidsDocumento25 páginasEE301 Lesson 13 Intro To AC SinusoidsBlueAinda não há avaliações
- Chapter 21 Sound Wave REVISIONDocumento4 páginasChapter 21 Sound Wave REVISIONYilea1111111Ainda não há avaliações
- Chapter 1Documento72 páginasChapter 1Chittira ManoharenAinda não há avaliações
- Transverse V Longitudinal Wave and Speed WsDocumento2 páginasTransverse V Longitudinal Wave and Speed WsHomero LucianoAinda não há avaliações
- Samsung 932BFDocumento74 páginasSamsung 932BFstevebensonAinda não há avaliações
- Syllabus: Wave Analyzers: Frequency Selective Wave Analyzer, Heterodyne Wave Analyzer, DistortionDocumento16 páginasSyllabus: Wave Analyzers: Frequency Selective Wave Analyzer, Heterodyne Wave Analyzer, DistortionVineela ThonduriAinda não há avaliações
- CM P1 11604 en SKF Vibration Sensors CatalogDocumento140 páginasCM P1 11604 en SKF Vibration Sensors CatalogMarcelo MallmannAinda não há avaliações
- Sample Vibration Assessment Analysis Report PDFDocumento10 páginasSample Vibration Assessment Analysis Report PDFmahreza189Ainda não há avaliações
- Data Sheet of ADE7751Documento17 páginasData Sheet of ADE7751NithyaAinda não há avaliações
- Propagation Factors Controlling Mean Filed Strength On Urban StreetsDocumento8 páginasPropagation Factors Controlling Mean Filed Strength On Urban StreetssamwisegameeAinda não há avaliações
- Lesson Plan in (Science, Grade 7)Documento6 páginasLesson Plan in (Science, Grade 7)Jeck OroAinda não há avaliações
- Is.14893.2001 Pile Integrity Test PDFDocumento14 páginasIs.14893.2001 Pile Integrity Test PDFParth Patel100% (1)
- Naval Sonar, NAVPERS 10884, 1953 Was Created A Few Years After WW II and IncorporatesDocumento48 páginasNaval Sonar, NAVPERS 10884, 1953 Was Created A Few Years After WW II and IncorporatesHaerul ImamAinda não há avaliações
- Basic Physics PDFDocumento134 páginasBasic Physics PDFJuan MercadoAinda não há avaliações
- 20 Plane Wave Propagation in A Dielectric MediumDocumento14 páginas20 Plane Wave Propagation in A Dielectric Mediumzahra sattariAinda não há avaliações
- WS 8-1 VariationDocumento2 páginasWS 8-1 VariationbirrajAinda não há avaliações
- Stepper Motor Drive Systems SD3 15, D9: Catalogue JanuaryDocumento68 páginasStepper Motor Drive Systems SD3 15, D9: Catalogue JanuaryBrendisAinda não há avaliações
- Lino TuneDocumento8 páginasLino TuneAnonymous Wyb8Y1Ainda não há avaliações
- Combustion Dynamics Application of Active InstabilDocumento17 páginasCombustion Dynamics Application of Active InstabilEduardoAinda não há avaliações
- Questionbank PHYSICS ICSE10Documento59 páginasQuestionbank PHYSICS ICSE10Devesh TiwariAinda não há avaliações
- C.A 6115Documento6 páginasC.A 6115Ini AtnAinda não há avaliações
- 6 Waves TDocumento52 páginas6 Waves THuda IdrisAinda não há avaliações
- Operator Manual Doppler Speedlog Ds80Documento42 páginasOperator Manual Doppler Speedlog Ds80Can KaramanAinda não há avaliações
- 3RG6 Sonar-BERO Ultrasonic Proximity Switches: GeneralDocumento22 páginas3RG6 Sonar-BERO Ultrasonic Proximity Switches: Generalyouri59490Ainda não há avaliações
- Airborne Laser Scanning Basic Relations and Formulas PDFDocumento16 páginasAirborne Laser Scanning Basic Relations and Formulas PDFsmr767Ainda não há avaliações
- Sound Icse Physics 8thDocumento7 páginasSound Icse Physics 8thSANDEEP SINGHAinda não há avaliações
- PolarisationDocumento27 páginasPolarisationkatemcpAinda não há avaliações
- Users Manual: Sgp10Xxs Series Direct Digital Synthesis (DDS) Signal GeneratorDocumento7 páginasUsers Manual: Sgp10Xxs Series Direct Digital Synthesis (DDS) Signal GeneratorCarbon Nano TubeAinda não há avaliações
- Rolls-Royce M250-C20R SERIES OPERATION AND MAINTENANCE 720000 - 4Documento24 páginasRolls-Royce M250-C20R SERIES OPERATION AND MAINTENANCE 720000 - 4anony8103Ainda não há avaliações