Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- User'S Manual: Capstone MicroturbineDocumento56 páginasUser'S Manual: Capstone MicroturbinemassimocalviAinda não há avaliações
- MILL Series GB-1007 01Documento20 páginasMILL Series GB-1007 01Ady IonutAinda não há avaliações
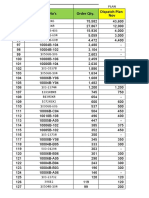
- Order Qty Vs Dispatch Plan - 04 11 20Documento13 páginasOrder Qty Vs Dispatch Plan - 04 11 20NPD1 JAKAPAinda não há avaliações
- Material Safety Data Sheet: Roduct Ompany DentificationDocumento6 páginasMaterial Safety Data Sheet: Roduct Ompany DentificationArgade GVAinda não há avaliações
- MJ4502 High-Power PNP Silicon TransistorDocumento4 páginasMJ4502 High-Power PNP Silicon Transistorjoao victorAinda não há avaliações
- IBM System Storage DS8000 - A QuickDocumento10 páginasIBM System Storage DS8000 - A Quickmuruggan_aAinda não há avaliações
- Diesel Generator Set QSL9 Series Engine: Power GenerationDocumento4 páginasDiesel Generator Set QSL9 Series Engine: Power Generationsdasd100% (1)
- How Is Electrical Energy MeasuredDocumento4 páginasHow Is Electrical Energy MeasuredSonya ReddyAinda não há avaliações
- Steel Top Hats Battens Capacitytables Product Technical ManualDocumento16 páginasSteel Top Hats Battens Capacitytables Product Technical ManualbhukthaAinda não há avaliações
- FL-02-01 PM SheetDocumento12 páginasFL-02-01 PM SheetBikas SahaAinda não há avaliações
- Published Document Guidance On The Use of BS EN 13108, Bituminous Mixtures - Material SpecificationsDocumento8 páginasPublished Document Guidance On The Use of BS EN 13108, Bituminous Mixtures - Material SpecificationsCristián JiménezAinda não há avaliações
- Panel 01-Eldora-Grand-1500V-2021-R01 - G1Documento2 páginasPanel 01-Eldora-Grand-1500V-2021-R01 - G1DHAVAL SHAHAinda não há avaliações
- Oil & Gas Asset Integrity IssuesDocumento15 páginasOil & Gas Asset Integrity Issuesyogolain100% (2)
- State ManagementDocumento16 páginasState Managementnegikamal703Ainda não há avaliações
- Asme Wec Chapter Annual ReportDocumento12 páginasAsme Wec Chapter Annual ReportManazar HussainAinda não há avaliações
- UH-60A Blackhawk Eng. Simulation Program, Vol. 1, Math ModelDocumento361 páginasUH-60A Blackhawk Eng. Simulation Program, Vol. 1, Math Modelmanitheaerialfighter100% (1)
- HARGA REFERENSI B2S PapuaDocumento6 páginasHARGA REFERENSI B2S PapuaAbiyoga AdhityaAinda não há avaliações
- Meai Mar 2010Documento36 páginasMeai Mar 2010Daneshwer VermaAinda não há avaliações
- RT L2 General Examination PaperDocumento4 páginasRT L2 General Examination PaperdaddadAinda não há avaliações
- Diet Coke & Mentos Geyser Lab 2011-2012Documento4 páginasDiet Coke & Mentos Geyser Lab 2011-2012Frederick LoganAinda não há avaliações
- Alien Vault Lab2Documento28 páginasAlien Vault Lab2DukeAinda não há avaliações
- ElectronicsDocumento3 páginasElectronicsashishkumar218Ainda não há avaliações
- BPSK SimulinkDocumento13 páginasBPSK SimulinkpootommyAinda não há avaliações
- Fiber Optic Trainer/ Fiber & OSP TechnicianDocumento7 páginasFiber Optic Trainer/ Fiber & OSP Technicianapi-78570706Ainda não há avaliações
- Adjusting Well Pump Pressure SwitchesDocumento1 páginaAdjusting Well Pump Pressure SwitchesD_D_76Ainda não há avaliações
- 8th ICCIT - 2005 - 564Documento5 páginas8th ICCIT - 2005 - 564Amit BiswasAinda não há avaliações
- Chapter 2 - 2 Plane Curvilinear MotionDocumento37 páginasChapter 2 - 2 Plane Curvilinear MotionAlfredo Ruiz ValenciaAinda não há avaliações
- 1Documento100 páginas1Niomi GolraiAinda não há avaliações
- PNR90 PNR510 PNR91 PNR515 PNR92 PNR520: Manual of - Installation - Operating - Maintenance Heavy Oil Burners TypeDocumento28 páginasPNR90 PNR510 PNR91 PNR515 PNR92 PNR520: Manual of - Installation - Operating - Maintenance Heavy Oil Burners Typec_lucian2004Ainda não há avaliações