Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Calculation Sheet: Design of PedestalDocumento9 páginasCalculation Sheet: Design of PedestalersivarajAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Office Safety ChecklistDocumento3 páginasOffice Safety ChecklistJaijeev Pali100% (1)
- PM High Strength Magnetic Alloys PDFDocumento13 páginasPM High Strength Magnetic Alloys PDFSAMIT JAINAinda não há avaliações
- Zero Air For Gas Chromatography: Market Application PublicationDocumento2 páginasZero Air For Gas Chromatography: Market Application PublicationSrinivasan RaviAinda não há avaliações
- Astm Standards: S. NO. Description Standard No. No. of CopiesDocumento1 páginaAstm Standards: S. NO. Description Standard No. No. of CopiesSrinivasan RaviAinda não há avaliações
- Affection PDFDocumento4 páginasAffection PDFSrinivasan RaviAinda não há avaliações
- LappingDocumento25 páginasLappingSrinivasan Ravi100% (1)
- A Guide To Shaft SealsDocumento5 páginasA Guide To Shaft SealsSrinivasan RaviAinda não há avaliações
- Biodiesel: Soy-Oil-Powered Public BusDocumento8 páginasBiodiesel: Soy-Oil-Powered Public BusSrinivasan RaviAinda não há avaliações
- A Lesson From GeeseDocumento13 páginasA Lesson From GeeseSrinivasan Ravi100% (1)
- Rociadores Contra IncendioDocumento4 páginasRociadores Contra IncendiocarlosAinda não há avaliações
- Structural Steel Design BowlesDocumento276 páginasStructural Steel Design BowlesIonut Narcis Iuga88% (8)
- Guide To Epoxy Grouting: Foundation Preparation FormingDocumento2 páginasGuide To Epoxy Grouting: Foundation Preparation FormingerleosAinda não há avaliações
- ASME B31.4 - 2006 (Excerpt - Pgs. 39, 40 & 41)Documento3 páginasASME B31.4 - 2006 (Excerpt - Pgs. 39, 40 & 41)Paul CassellsAinda não há avaliações
- Types of WireDocumento2 páginasTypes of WireMICHAELAinda não há avaliações
- Dual Fuel HCCI Combustion - High Octane and High Cetane Number FuelsDocumento22 páginasDual Fuel HCCI Combustion - High Octane and High Cetane Number Fuelsali reza ShakooriAinda não há avaliações
- Pittcote 404 PDFDocumento2 páginasPittcote 404 PDFJuan Manuel DiazAinda não há avaliações
- FBE Installation Manual PDFDocumento60 páginasFBE Installation Manual PDFMario R. KallabAinda não há avaliações
- CP13 1999Documento55 páginasCP13 1999Nyan Myint TunAinda não há avaliações
- 2014 1275 SCANFiningLARTCDocumento19 páginas2014 1275 SCANFiningLARTCdonald55555Ainda não há avaliações
- PiezoMEMS Workshop Aachen - 180510 OerlikonDocumento20 páginasPiezoMEMS Workshop Aachen - 180510 OerlikonEvilásio SouzaAinda não há avaliações
- Ba150e d285 NMC GL 5640001230 en 3 2Documento6 páginasBa150e d285 NMC GL 5640001230 en 3 2Bogdan DavidescuAinda não há avaliações
- Transformer Test ReportDocumento47 páginasTransformer Test Reportravi142857100% (3)
- Air CompressorDocumento48 páginasAir CompressorMarius Condurache0% (1)
- Fibre Reinforced Concrete PDFDocumento6 páginasFibre Reinforced Concrete PDFAref AbadelAinda não há avaliações
- TLCDocumento6 páginasTLCDoni DermawanAinda não há avaliações
- Aluminium and CorrosionDocumento12 páginasAluminium and CorrosionMehman NasibovAinda não há avaliações
- Thermodynamics & IC Engines Lab ManualDocumento170 páginasThermodynamics & IC Engines Lab ManualNABIL HUSSAINAinda não há avaliações
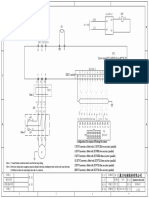
- D10D632 Electrical Schematic diagram-ENDocumento31 páginasD10D632 Electrical Schematic diagram-ENPrakashAinda não há avaliações
- AAC BlocksDocumento15 páginasAAC BlocksJohn WickAinda não há avaliações
- Jis C8364-RDocumento32 páginasJis C8364-RVenugopalan ManaladikalamAinda não há avaliações
- Single Electron Transistor NanoDocumento2 páginasSingle Electron Transistor NanoDerry PermanaAinda não há avaliações
- Solar Thermal TechnologiesDocumento48 páginasSolar Thermal TechnologiesVinoth MalaikaniAinda não há avaliações
- Timken Corrosion Resistant Poly Round Plain Bearing Housed Unit Catalog - 11259Documento80 páginasTimken Corrosion Resistant Poly Round Plain Bearing Housed Unit Catalog - 11259Leroy AraoAinda não há avaliações
- BQ With PriceDocumento26 páginasBQ With PriceLee Yuxuan100% (1)
- Primary Energy - Part B - STUDENTDocumento6 páginasPrimary Energy - Part B - STUDENTHao Phan AnhAinda não há avaliações
- Industrial Instrumentation NotesDocumento13 páginasIndustrial Instrumentation NotesArun RajeshAinda não há avaliações