Você também pode gostar
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Borang Ambulans CallDocumento2 páginasBorang Ambulans Callleo89azman100% (1)
- TIMO Final 2020-2021 P3Documento5 páginasTIMO Final 2020-2021 P3An Nguyen100% (2)
- WebLMT HelpDocumento12 páginasWebLMT HelpJoão LopesAinda não há avaliações
- Objective & Scope of ProjectDocumento8 páginasObjective & Scope of ProjectPraveen SehgalAinda não há avaliações
- Technical Specification For 33KV VCB BoardDocumento7 páginasTechnical Specification For 33KV VCB BoardDipankar ChatterjeeAinda não há avaliações
- Blue Prism Data Sheet - Provisioning A Blue Prism Database ServerDocumento5 páginasBlue Prism Data Sheet - Provisioning A Blue Prism Database Serverreddy_vemula_praveenAinda não há avaliações
- Linguistics Is Descriptive, Not Prescriptive.: Prescriptive Grammar. Prescriptive Rules Tell You HowDocumento2 páginasLinguistics Is Descriptive, Not Prescriptive.: Prescriptive Grammar. Prescriptive Rules Tell You HowMonette Rivera Villanueva100% (1)
- Mcdonald 2016Documento10 páginasMcdonald 2016Andrika SaputraAinda não há avaliações
- Making Effective Powerpoint Presentations: October 2014Documento18 páginasMaking Effective Powerpoint Presentations: October 2014Mariam TchkoidzeAinda não há avaliações
- C - Amarjit Singh So Bhura SinghDocumento5 páginasC - Amarjit Singh So Bhura SinghRohit JindalAinda não há avaliações
- Functional DesignDocumento17 páginasFunctional DesignRajivSharmaAinda não há avaliações
- FDA Approves First Gene Therapy, Betibeglogene Autotemcel (Zynteglo), For Beta-ThalassemiaDocumento3 páginasFDA Approves First Gene Therapy, Betibeglogene Autotemcel (Zynteglo), For Beta-ThalassemiaGiorgi PopiashviliAinda não há avaliações
- Ron Kangas - IoanDocumento11 páginasRon Kangas - IoanBogdan SoptereanAinda não há avaliações
- Costbenefit Analysis 2015Documento459 páginasCostbenefit Analysis 2015TRÂM NGUYỄN THỊ BÍCHAinda não há avaliações
- Excon2019 ShowPreview02122019 PDFDocumento492 páginasExcon2019 ShowPreview02122019 PDFSanjay KherAinda não há avaliações
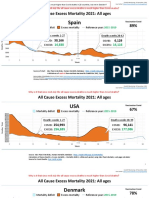
- Countries EXCESS DEATHS All Ages - 15nov2021Documento21 páginasCountries EXCESS DEATHS All Ages - 15nov2021robaksAinda não há avaliações
- Aptitude Number System PDFDocumento5 páginasAptitude Number System PDFharieswaranAinda não há avaliações
- Plaza 66 Tower 2 Structural Design ChallengesDocumento13 páginasPlaza 66 Tower 2 Structural Design ChallengessrvshAinda não há avaliações
- PMP Question BankDocumento3 páginasPMP Question BankOmerZiaAinda não há avaliações
- DP 2 Human IngenuityDocumento8 páginasDP 2 Human Ingenuityamacodoudiouf02Ainda não há avaliações
- Role of Personal Finance Towards Managing of Money - DraftaDocumento35 páginasRole of Personal Finance Towards Managing of Money - DraftaAndrea Denise Lion100% (1)
- Log Building News - Issue No. 76Documento32 páginasLog Building News - Issue No. 76ursindAinda não há avaliações
- Golf Croquet Refereeing Manual - Croquet AustraliaDocumento78 páginasGolf Croquet Refereeing Manual - Croquet AustraliaSenorSushi100% (1)
- Project ManagementDocumento11 páginasProject ManagementBonaventure NzeyimanaAinda não há avaliações
- The Mantel Colonized Nation Somalia 10 PDFDocumento5 páginasThe Mantel Colonized Nation Somalia 10 PDFAhmad AbrahamAinda não há avaliações
- Agco Serie 800 PDFDocumento24 páginasAgco Serie 800 PDFJohnny VargasAinda não há avaliações
- Jesus Prayer-JoinerDocumento13 páginasJesus Prayer-Joinersleepknot_maggotAinda não há avaliações
- Quantitative Methods For Economics and Business Lecture N. 5Documento20 páginasQuantitative Methods For Economics and Business Lecture N. 5ghassen msakenAinda não há avaliações
- PR KehumasanDocumento14 páginasPR KehumasanImamAinda não há avaliações
- Negotiating Skills Negotiating Skills: To Provide You With The Skills To Plan & Implement Successful NegotiationDocumento32 páginasNegotiating Skills Negotiating Skills: To Provide You With The Skills To Plan & Implement Successful NegotiationKanimozhi.SAinda não há avaliações