Você também pode gostar
- University of Alberta ANSYS Tutorials - NonLinear AnalysisDocumento6 páginasUniversity of Alberta ANSYS Tutorials - NonLinear AnalysisRithesh Baliga BAinda não há avaliações
- Explicit FormingDocumento23 páginasExplicit FormingMaryem Ben SalemAinda não há avaliações
- Scaling of Base Shear in ETABS - Structural CalcDocumento19 páginasScaling of Base Shear in ETABS - Structural CalcAboalmaail AlaminAinda não há avaliações
- Explicit Dynamic Analysis - AbaqusDocumento19 páginasExplicit Dynamic Analysis - AbaqusDavid RivadeneiraAinda não há avaliações
- School of Mechanical and Manufacturing Engineering Assignment SubmissionDocumento8 páginasSchool of Mechanical and Manufacturing Engineering Assignment SubmissionShivam GoelAinda não há avaliações
- Linear Dynamic Analysis With MatlabDocumento1 páginaLinear Dynamic Analysis With MatlabIsmail MohammedAinda não há avaliações
- Intorductory Composite Lab ReportDocumento6 páginasIntorductory Composite Lab ReportTory JohansenAinda não há avaliações
- Mesh Convergence ExercisesDocumento10 páginasMesh Convergence ExercisesAbdul wahid ButtAinda não há avaliações
- Kinematics PracticalsDocumento17 páginasKinematics PracticalsJennifer MooreAinda não há avaliações
- Expt #3 (Circular Motion) Phys 1601 Fall 2019Documento3 páginasExpt #3 (Circular Motion) Phys 1601 Fall 2019HossAinda não há avaliações
- CN Project IIDocumento6 páginasCN Project IIVikram MohantyAinda não há avaliações
- Liggghts TutorialDocumento18 páginasLiggghts TutorialClaudio Alvarez GonzalezAinda não há avaliações
- Tutorial 2 Turbulent Pipe Flow: Problem SpecificationDocumento37 páginasTutorial 2 Turbulent Pipe Flow: Problem Specificationcheh han seumAinda não há avaliações
- LAB 5 VibrationDocumento6 páginasLAB 5 Vibrationmohdiqbal930% (1)
- Workshop 14aDocumento4 páginasWorkshop 14aNico VazquezAinda não há avaliações
- Verification of PerformDocumento15 páginasVerification of PerformMunteanu DanAinda não há avaliações
- CFD LabDocumento8 páginasCFD LabtechctrlAinda não há avaliações
- Lab 8 Conservation of Energy KineticDocumento3 páginasLab 8 Conservation of Energy KineticAndrew GomezAinda não há avaliações
- Buckling of Tubes and Shells: Experimental Stress Analysis LabDocumento7 páginasBuckling of Tubes and Shells: Experimental Stress Analysis Labprodn123Ainda não há avaliações
- Lab 2a Dynamic Response of A Mass-Spring System With DampingDocumento5 páginasLab 2a Dynamic Response of A Mass-Spring System With DampingPrashant AshishAinda não há avaliações
- Comparison of Turbulence Models On 2D Backward Facing StepDocumento16 páginasComparison of Turbulence Models On 2D Backward Facing Stepeldwin_dj7216Ainda não há avaliações
- DEP 613 - Homework Assignment 4: Dr. Barış ErkuşDocumento3 páginasDEP 613 - Homework Assignment 4: Dr. Barış ErkuşSalim AyalpAinda não há avaliações
- AE4131 ABAQUS Lecture 5Documento35 páginasAE4131 ABAQUS Lecture 5Henrique Rodrigues OliveiraAinda não há avaliações
- Models - Sme.building Response SpectrumDocumento28 páginasModels - Sme.building Response SpectrumVirat DesaiAinda não há avaliações
- Velest InstructionsDocumento5 páginasVelest Instructionsrizalramadhani789Ainda não há avaliações
- Explicit Dynamic AnalysisDocumento12 páginasExplicit Dynamic AnalysisMenes BadikaAinda não há avaliações
- Numerical ControlsDocumento6 páginasNumerical ControlspotriAinda não há avaliações
- Performing Steady-State Pedestrian Crowd Loading To BS en 1991-2 2003Documento16 páginasPerforming Steady-State Pedestrian Crowd Loading To BS en 1991-2 2003Milind GuptaAinda não há avaliações
- Appendix A: Laboratory Report FormatDocumento10 páginasAppendix A: Laboratory Report Formatahsan aliAinda não há avaliações
- LS-DYNA Implicit Workshop: Problem #1: Tensile TestDocumento22 páginasLS-DYNA Implicit Workshop: Problem #1: Tensile Testsrinivas kappagantulaAinda não há avaliações
- EE 179.1 Activity 5: Time ResponseDocumento6 páginasEE 179.1 Activity 5: Time ResponseMark EricAinda não há avaliações
- Scanning Tunnelling Microscope: PC2232 Physics For Electrical EngineersDocumento17 páginasScanning Tunnelling Microscope: PC2232 Physics For Electrical EngineersHuzaifa ShabbirAinda não há avaliações
- Finite Element Project 3-4-2013 Vfinal2Documento6 páginasFinite Element Project 3-4-2013 Vfinal2Marcelo ZiulkoskiAinda não há avaliações
- 2004 Int Ansys Conf 51Documento10 páginas2004 Int Ansys Conf 51maitoravi78Ainda não há avaliações
- Workshop 12a Dynamic Analysis of A Skew PlateDocumento4 páginasWorkshop 12a Dynamic Analysis of A Skew PlateTuanNguễnAinda não há avaliações
- Session 50 Theory of Explicit Dynamic AnalysisDocumento12 páginasSession 50 Theory of Explicit Dynamic AnalysisPraveen MalikAinda não há avaliações
- Microstran EquarkeloadDocumento6 páginasMicrostran Equarkeloadshantanu chowdhuryAinda não há avaliações
- Vasp 2Documento4 páginasVasp 2Jaeyong JooAinda não há avaliações
- Derivation 01Documento2 páginasDerivation 01mbmonvilleAinda não há avaliações
- Tutorial 1Documento10 páginasTutorial 1usernameusernaAinda não há avaliações
- Investigation of Quantum Algorithms For Direct Numerical Simulation of The Navier-Stokes EquationsDocumento17 páginasInvestigation of Quantum Algorithms For Direct Numerical Simulation of The Navier-Stokes EquationsマルワAinda não há avaliações
- Analysis and Design of Projects in UaeDocumento5 páginasAnalysis and Design of Projects in UaealbfaragAinda não há avaliações
- Example 2 - Snap-Through Roof (Explicit / Implicit)Documento14 páginasExample 2 - Snap-Through Roof (Explicit / Implicit)Santhosh LingappaAinda não há avaliações
- Mechanics of Material Lab6Documento36 páginasMechanics of Material Lab6NiroexAinda não há avaliações
- Lab 4c: Driven Mass-Spring System With Damping: 58:080 Experimental EngineeringDocumento24 páginasLab 4c: Driven Mass-Spring System With Damping: 58:080 Experimental EngineeringAhmed H HusseinAinda não há avaliações
- Tutorial 5 FluentDocumento56 páginasTutorial 5 FluentCrisner ToicenAinda não há avaliações
- CHE 42 - Problem Set 5 - Gas Absorption and StrippingDocumento2 páginasCHE 42 - Problem Set 5 - Gas Absorption and StrippingROMELIE GABALLO ALBIAAinda não há avaliações
- Adv 9Documento18 páginasAdv 9Micu Ionut BogdanAinda não há avaliações
- Abaqus Example - 2017 - 1.1.5 Collapse of A Concrete Slab ProductsDocumento8 páginasAbaqus Example - 2017 - 1.1.5 Collapse of A Concrete Slab Productsmoheldeenhijazi100% (1)
- Adaptive Refinement in Vibrational Analysis and Isogemetric AnalysisDocumento22 páginasAdaptive Refinement in Vibrational Analysis and Isogemetric AnalysisAbhishek KumarAinda não há avaliações
- Example-Steady Incompressible Flow: Solved With Comsol Multiphysics 3.5ADocumento14 páginasExample-Steady Incompressible Flow: Solved With Comsol Multiphysics 3.5AGabotecnaAinda não há avaliações
- Turbulent Flow PDFDocumento18 páginasTurbulent Flow PDFVinod Kumar PatelAinda não há avaliações
- Cantilever Beam TutorialDocumento7 páginasCantilever Beam TutorialMohammad Ahmad GharaibehAinda não há avaliações
- Classical Approach to Constrained and Unconstrained Molecular DynamicsNo EverandClassical Approach to Constrained and Unconstrained Molecular DynamicsAinda não há avaliações
- Spline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsNo EverandSpline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsAinda não há avaliações
- Spectral method for fatigue damage estimation with non-zero mean stressNo EverandSpectral method for fatigue damage estimation with non-zero mean stressAinda não há avaliações
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionAinda não há avaliações
- A-level Physics Revision: Cheeky Revision ShortcutsNo EverandA-level Physics Revision: Cheeky Revision ShortcutsNota: 3 de 5 estrelas3/5 (10)
- Factorization of Boundary Value Problems Using the Invariant Embedding MethodNo EverandFactorization of Boundary Value Problems Using the Invariant Embedding MethodAinda não há avaliações
- Standard-Slope Integration: A New Approach to Numerical IntegrationNo EverandStandard-Slope Integration: A New Approach to Numerical IntegrationAinda não há avaliações
- REBAR Standards HistoryDocumento9 páginasREBAR Standards HistoryengrfarhanAAAAinda não há avaliações
- Bolt and Weld Capacities - BS5950Documento1 páginaBolt and Weld Capacities - BS5950Helena DomičićAinda não há avaliações
- Welding and Reinforcement PDFDocumento9 páginasWelding and Reinforcement PDFScottBuchholzAinda não há avaliações
- Lime StabilisationDocumento9 páginasLime StabilisationScottBuchholzAinda não há avaliações
- Abaqus - FEA of A Cantilevered BeamDocumento23 páginasAbaqus - FEA of A Cantilevered BeamIvanadoAinda não há avaliações
- FEM Tutorial Using AbaqusDocumento2 páginasFEM Tutorial Using AbaqusScottBuchholzAinda não há avaliações
- Ce3201 L3 06Documento22 páginasCe3201 L3 06JR ZunigaAinda não há avaliações
- Welding and ReinforcementDocumento9 páginasWelding and ReinforcementScottBuchholzAinda não há avaliações
- 7 Abaqus Conv GuidelinesDocumento4 páginas7 Abaqus Conv GuidelinesSrinivas RallabandiAinda não há avaliações
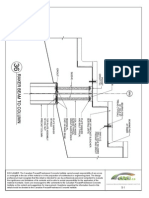
- 36 - Raker Beam To ColumnDocumento1 página36 - Raker Beam To ColumnSahand JeffAinda não há avaliações
- Intro To TransportDocumento21 páginasIntro To TransportScottBuchholzAinda não há avaliações
- Presentation 1Documento1 páginaPresentation 1ScottBuchholzAinda não há avaliações
- 1 ContentsDocumento11 páginas1 ContentsephAinda não há avaliações
- Monday Tuesday Wednesday Thursday Friday 8.00: Timetable WorksheetDocumento1 páginaMonday Tuesday Wednesday Thursday Friday 8.00: Timetable WorksheetScottBuchholzAinda não há avaliações
- Presentation 1Documento1 páginaPresentation 1ScottBuchholzAinda não há avaliações
- T I S C: Application For Record of ResultsDocumento3 páginasT I S C: Application For Record of ResultsScottBuchholzAinda não há avaliações
- GENG5505 Major Group Project - Marking Guide (Semester 1, 2015)Documento1 páginaGENG5505 Major Group Project - Marking Guide (Semester 1, 2015)ScottBuchholzAinda não há avaliações
- Suspension A8Documento5 páginasSuspension A8Bonny SidhuAinda não há avaliações
- Assignment On Wave Function and Born's Interpretation On Wave FunctionDocumento6 páginasAssignment On Wave Function and Born's Interpretation On Wave FunctionMehak MughalAinda não há avaliações
- SKF ConCentra Ball Bearings Units - 6107 - I - ENDocumento28 páginasSKF ConCentra Ball Bearings Units - 6107 - I - ENfcrosa100% (1)
- Orientation Syllabus Thermo 2Documento16 páginasOrientation Syllabus Thermo 2Kenneth Rodriguez HerminadoAinda não há avaliações
- Skoda Fabia 1.4Documento2 páginasSkoda Fabia 1.4wnsdAinda não há avaliações
- Solved ProblemDocumento35 páginasSolved ProblemTroy BaongAinda não há avaliações
- Ot SluiceDocumento3 páginasOt Sluicegurumurthy38Ainda não há avaliações
- FRR 500 - 500S Igm0087 - 6-CylDocumento4 páginasFRR 500 - 500S Igm0087 - 6-CylMarvin White0% (1)
- BR Cat VF-W STD Eng r07 1Documento268 páginasBR Cat VF-W STD Eng r07 1Brian LeslieAinda não há avaliações
- STC-1000 Temperature Controller Operating Manual: or or orDocumento1 páginaSTC-1000 Temperature Controller Operating Manual: or or orziandAinda não há avaliações
- Catalogos BombasDocumento12 páginasCatalogos BombasJose NavarreteAinda não há avaliações
- Notes PDFDocumento252 páginasNotes PDFclose022Ainda não há avaliações
- sl2019 685Documento3 páginassl2019 685avm4343Ainda não há avaliações
- IGCSE 13 Forces&MovementDocumento26 páginasIGCSE 13 Forces&MovementHakim Abbas Ali PhalasiyaAinda não há avaliações
- Nissan RB Engine - WikipediaDocumento60 páginasNissan RB Engine - WikipediaZedrick Nell100% (2)
- Mod9 - PROCESS HAZARDS AND SAFETY MEASURES IN EQUIPMENT DESIGN PDFDocumento13 páginasMod9 - PROCESS HAZARDS AND SAFETY MEASURES IN EQUIPMENT DESIGN PDFDhanny MiharjaAinda não há avaliações
- Final/5.Thermal Stress and Heat Transfer Analysis of PlatesDocumento3 páginasFinal/5.Thermal Stress and Heat Transfer Analysis of PlatesKkaaAinda não há avaliações
- Válvula de Seguridad Anderson Greenwood Crosby - La Rosita - Jos-EDocumento66 páginasVálvula de Seguridad Anderson Greenwood Crosby - La Rosita - Jos-EJose Flores100% (2)
- API-620 Nde TestDocumento3 páginasAPI-620 Nde Testjojo_323Ainda não há avaliações
- Compressed Air Filters: Sullair Distributor Conference 2001Documento47 páginasCompressed Air Filters: Sullair Distributor Conference 2001MauroAinda não há avaliações
- Helical Gears ProblemsDocumento29 páginasHelical Gears Problemsa17e100% (1)
- FD100 分Documento17 páginasFD100 分Hadi FaisalAinda não há avaliações
- Fatigue Curve For SCM440Documento6 páginasFatigue Curve For SCM440Nagaraj RaoAinda não há avaliações
- Almas-Tower Structural DesignDocumento12 páginasAlmas-Tower Structural DesignBalaji PalaniAinda não há avaliações
- Mech ANM 2019R1 WS04D-Anisotropic HyperelasticityDocumento14 páginasMech ANM 2019R1 WS04D-Anisotropic HyperelasticityDong LIAinda não há avaliações
- Raw Pareto Week 51Documento349 páginasRaw Pareto Week 51Ahmat RamadaniAinda não há avaliações
- Boiler Starting Operating ProcedureDocumento2 páginasBoiler Starting Operating ProcedureRoopeshAinda não há avaliações
- Demag DF 125 enDocumento234 páginasDemag DF 125 enBaciu Nicolae50% (2)
- Piston Rings GuideDocumento5 páginasPiston Rings GuideAshok BishtAinda não há avaliações