Você também pode gostar
- Professional CV FormatDocumento2 páginasProfessional CV FormatShawn ParkerAinda não há avaliações
- Pharma MarketingDocumento55 páginasPharma MarketingArpan KoradiyaAinda não há avaliações
- Modern Surveying InstrumentsDocumento18 páginasModern Surveying Instrumentsmageshm167% (3)
- Secrets of UAV PhotomappingDocumento69 páginasSecrets of UAV PhotomappingKrzysztof BosakAinda não há avaliações
- Multi-Camera Networks: Principles and ApplicationsNo EverandMulti-Camera Networks: Principles and ApplicationsHamid AghajanNota: 3 de 5 estrelas3/5 (1)
- LRS Trading StrategyDocumento24 páginasLRS Trading Strategybharatbaba363Ainda não há avaliações
- Sensors For Space ApplicationsDocumento6 páginasSensors For Space Applicationsamiriut97Ainda não há avaliações
- CMP Tutorial PDFDocumento83 páginasCMP Tutorial PDFMax HaroutunianAinda não há avaliações
- Compact Dual Polarization Lidar System Description and Data ProcessingDocumento6 páginasCompact Dual Polarization Lidar System Description and Data Processingypbk100% (1)
- Hatch Cover Maintenance PlanDocumento5 páginasHatch Cover Maintenance Planvinay3972Ainda não há avaliações
- Firewall Geometric Design-SaiTejaDocumento9 páginasFirewall Geometric Design-SaiTejanaveenAinda não há avaliações
- Photogrametry and 3D ModelingDocumento7 páginasPhotogrametry and 3D ModelingVeruzkaAinda não há avaliações
- New Sensors and Processing ChainNo EverandNew Sensors and Processing ChainJean-Hugh ThomasAinda não há avaliações
- Inspection of Components With The Support of The DronesDocumento6 páginasInspection of Components With The Support of The DronesF. GiacobbeAinda não há avaliações
- Sar Uav PDFDocumento24 páginasSar Uav PDFadityaAinda não há avaliações
- Building Information Modeling BIM Systems and TheiDocumento13 páginasBuilding Information Modeling BIM Systems and Theipurvakul10Ainda não há avaliações
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1No EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1Ainda não há avaliações
- Microcopter-Based Color Infrared (CIR) Close Range Remote Sensing As A Subsidiary Tool For Precision FarmingDocumento7 páginasMicrocopter-Based Color Infrared (CIR) Close Range Remote Sensing As A Subsidiary Tool For Precision FarmingJack58Ainda não há avaliações
- A Flexible Unmanned Aerial Vehicle For Precision AgricultureDocumento7 páginasA Flexible Unmanned Aerial Vehicle For Precision AgricultureCharith R RameshAinda não há avaliações
- Ultracam Eagle Details and InsightDocumento5 páginasUltracam Eagle Details and InsightarriondaAinda não há avaliações
- Operation of The Ultracamd Together With Ccns4aeroDocumento7 páginasOperation of The Ultracamd Together With Ccns4aeroBatı AkdenizAinda não há avaliações
- Airborne Infrared Hyperspectral Imager For Intelligence, Surveillance and Reconnaissance ApplicationsDocumento12 páginasAirborne Infrared Hyperspectral Imager For Intelligence, Surveillance and Reconnaissance Applicationssamirsamira928Ainda não há avaliações
- Zhang, Hao - Lightweight Integrated Solution For A UAV-Borne Hyperspectral Imaging SystemDocumento17 páginasZhang, Hao - Lightweight Integrated Solution For A UAV-Borne Hyperspectral Imaging SystemjuanjoAinda não há avaliações
- Hypercube The Intelligent Hyperspectral Imager: Abstract - Hyperube Is The First Ever MiniaturizedDocumento4 páginasHypercube The Intelligent Hyperspectral Imager: Abstract - Hyperube Is The First Ever MiniaturizedtusharparabAinda não há avaliações
- FSR05 Sky SailorDocumento12 páginasFSR05 Sky SailorAndrei BadulescuAinda não há avaliações
- Mobile 3D Mapping With A Low-Cost UAV SystemDocumento6 páginasMobile 3D Mapping With A Low-Cost UAV SystemGANESHAinda não há avaliações
- Direct and Indirect Dual Axis Solar Tracking System With Weather ConditionDocumento63 páginasDirect and Indirect Dual Axis Solar Tracking System With Weather ConditionRukminiAinda não há avaliações
- Remote Sensing of Vegetation From UAV Platforms UsDocumento7 páginasRemote Sensing of Vegetation From UAV Platforms UsjuanjoAinda não há avaliações
- Low Cost AvDocumento5 páginasLow Cost AvrahulsundaresanAinda não há avaliações
- Unmanned Aircraft Systems For Remote Building Inspection and MonitoringDocumento8 páginasUnmanned Aircraft Systems For Remote Building Inspection and MonitoringAmada Arango PalominoAinda não há avaliações
- Sensor Amien ToDocumento18 páginasSensor Amien ToDante MelendezAinda não há avaliações
- Low Cost AvDocumento5 páginasLow Cost Avdemondrifter777Ainda não há avaliações
- The Processing of Image Data Collected by Light UA PDFDocumento4 páginasThe Processing of Image Data Collected by Light UA PDFvionaAinda não há avaliações
- Notes 3Documento82 páginasNotes 3sarvo singhAinda não há avaliações
- MGT-Proposal&Quote FinalDocumento58 páginasMGT-Proposal&Quote FinalKevinAinda não há avaliações
- Assistive Infrared Sensor Based Smart Stick For Blind PeopleDocumento6 páginasAssistive Infrared Sensor Based Smart Stick For Blind PeopleجعفرالشموسيAinda não há avaliações
- 148 PDFDocumento8 páginas148 PDFAAS SHAinda não há avaliações
- The Use of A Cubesat To Validate Technological Bricks in SpaceDocumento7 páginasThe Use of A Cubesat To Validate Technological Bricks in Spacellmm_088Ainda não há avaliações
- Microcontroller Based Multifunctional Automated Weather Monitoring and Logging SystemDocumento12 páginasMicrocontroller Based Multifunctional Automated Weather Monitoring and Logging SystemRuwan BolonghoAinda não há avaliações
- PayloadDocumento4 páginasPayloadXabi AdinAinda não há avaliações
- Synthetic Aperture Radar System Seminar ReportDocumento19 páginasSynthetic Aperture Radar System Seminar ReportsasankrpAinda não há avaliações
- The Terrasar-X Satellite Project: S. Buckreuss, W. Balzer, P. Mühlbauer R. WerninghausDocumento3 páginasThe Terrasar-X Satellite Project: S. Buckreuss, W. Balzer, P. Mühlbauer R. Werninghausshakir hussainAinda não há avaliações
- About Team AnantDocumento5 páginasAbout Team AnantSANSKRITI JINDALAinda não há avaliações
- Cubesat Deformable Mirror Demonstration: CitationDocumento12 páginasCubesat Deformable Mirror Demonstration: CitationjonAinda não há avaliações
- Autonomous Indoor Helicopter Flight Using A Single Onboard CameraDocumento8 páginasAutonomous Indoor Helicopter Flight Using A Single Onboard CameraAakash SheelvantAinda não há avaliações
- Deimos-2 - Satellite Missions - EoPortal DirectoryDocumento22 páginasDeimos-2 - Satellite Missions - EoPortal Directorynab05Ainda não há avaliações
- W F P C A UAV: Aypoint Light Arameter Omparison of AN UtonomousDocumento11 páginasW F P C A UAV: Aypoint Light Arameter Omparison of AN UtonomousAdam HansenAinda não há avaliações
- Remote Sensing: Cloudscout: A Deep Neural Network For On-Board Cloud Detection On Hyperspectral ImagesDocumento17 páginasRemote Sensing: Cloudscout: A Deep Neural Network For On-Board Cloud Detection On Hyperspectral Imageswardatul ayaAinda não há avaliações
- Redes NeuronalesDocumento23 páginasRedes NeuronalesEfren Lopez JimenezAinda não há avaliações
- Eco Friendly Electric Scooter For Energy Consumption: G. Priya, M.TechDocumento12 páginasEco Friendly Electric Scooter For Energy Consumption: G. Priya, M.TechGautham NAinda não há avaliações
- Techniques For Acquisition of Aerial Video Imagery: Practical PaperDocumento3 páginasTechniques For Acquisition of Aerial Video Imagery: Practical Paperarnold ibañezAinda não há avaliações
- Anna Banaszek Et Al 2017Documento7 páginasAnna Banaszek Et Al 2017Luciano StaffaAinda não há avaliações
- An Open Platform For Efficient Drone To Sensor - 2022 - Sustainable Computing IDocumento10 páginasAn Open Platform For Efficient Drone To Sensor - 2022 - Sustainable Computing InugrohoAinda não há avaliações
- 13dec201605122119 Ujjwal Mahajan 38-41Documento4 páginas13dec201605122119 Ujjwal Mahajan 38-41Janhavi JoshiAinda não há avaliações
- Javier BusquetsDocumento10 páginasJavier BusquetsiflavianAinda não há avaliações
- Synthetic Aperture Radar System Seminar ReportDocumento19 páginasSynthetic Aperture Radar System Seminar ReportSukanya KamakolanuAinda não há avaliações
- TS04H Sun Xie Et Al 5905Documento9 páginasTS04H Sun Xie Et Al 5905harshalAinda não há avaliações
- Direct Georeferencing of Ultrahigh-Resolution UAV Imagery: IEEE Transactions On Geoscience and Remote Sensing July 2013Documento9 páginasDirect Georeferencing of Ultrahigh-Resolution UAV Imagery: IEEE Transactions On Geoscience and Remote Sensing July 2013Sudung SitumorangAinda não há avaliações
- Abstract 181Documento17 páginasAbstract 181rrdpereiraAinda não há avaliações
- Swarm Exploration of Unknown Areas On Mars Using SLAMDocumento7 páginasSwarm Exploration of Unknown Areas On Mars Using SLAMhbhbhb hbhbhbAinda não há avaliações
- SimonDocumento10 páginasSimonGustavo GutierrezAinda não há avaliações
- UAV For 3D Mapping ApplicationsDocumento15 páginasUAV For 3D Mapping ApplicationsMert sefasefeAinda não há avaliações
- Iot Based Weather Station: A Minor Project ReportDocumento7 páginasIot Based Weather Station: A Minor Project ReportAjay TendulkarAinda não há avaliações
- Missile Surveillance System Using Arm: Special Issue - 5 International Conference - "ACCE - 2019"Documento7 páginasMissile Surveillance System Using Arm: Special Issue - 5 International Conference - "ACCE - 2019"Sushant SinghAinda não há avaliações
- TS01F Phan Thi Takahashi 9871Documento13 páginasTS01F Phan Thi Takahashi 9871Mihai Madalin SuicaAinda não há avaliações
- Infrared Object Position Locator: Oladapo, Opeoluwa AyokunleDocumento44 páginasInfrared Object Position Locator: Oladapo, Opeoluwa Ayokunleoopeoluwa_1Ainda não há avaliações
- Iot Based Solar Panel Monitoring and Control: J. Samuel, Dr.B. RajagopalDocumento10 páginasIot Based Solar Panel Monitoring and Control: J. Samuel, Dr.B. Rajagopalyaswanth 9573099277Ainda não há avaliações
- Wireless Relay Communications With Unmanned Aerial Vehicles: Performance and OptimizationDocumento32 páginasWireless Relay Communications With Unmanned Aerial Vehicles: Performance and OptimizationmanelouchkaAinda não há avaliações
- An Investigation of The Repetitive Failure in An Aircraft EngineDocumento15 páginasAn Investigation of The Repetitive Failure in An Aircraft EnginemanelouchkaAinda não há avaliações
- Math 2m16 1trim2Documento6 páginasMath 2m16 1trim2manelouchkaAinda não há avaliações
- Chapter 1Documento19 páginasChapter 1Shrinivas SaptalakarAinda não há avaliações
- Masonry - Block Joint Mortar 15bDocumento1 páginaMasonry - Block Joint Mortar 15bmanish260320Ainda não há avaliações
- Brake Actuator Instruction - ManualDocumento32 páginasBrake Actuator Instruction - ManualJoeAinda não há avaliações
- Draw 224-1Documento8 páginasDraw 224-1Alther Dabon33% (3)
- Model Variant Description Variant Code Extended Warranty Price Royal PlatinumDocumento2 páginasModel Variant Description Variant Code Extended Warranty Price Royal PlatinumRiyasAinda não há avaliações
- G 342 Engine Part 1 PDFDocumento26 páginasG 342 Engine Part 1 PDFharley florezAinda não há avaliações
- Chapter 3: Operating-System StructuresDocumento31 páginasChapter 3: Operating-System StructuresDiamond MindglanceAinda não há avaliações
- Web Service Integration With SAPDocumento7 páginasWeb Service Integration With SAPJoy PatelAinda não há avaliações
- Valve Face To Face Dimension ComparisonDocumento12 páginasValve Face To Face Dimension ComparisonRagul NAinda não há avaliações
- Turnitin Originality ReportDocumento47 páginasTurnitin Originality ReportStillward Laud Mark-MillsAinda não há avaliações
- Unreal Tournament CheatDocumento3 páginasUnreal Tournament CheatDante SpardaAinda não há avaliações
- FacebookDocumento13 páginasFacebookDivya SharmaAinda não há avaliações
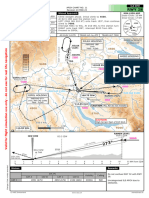
- LSZH Apch11 Rwy28 IlsDocumento1 páginaLSZH Apch11 Rwy28 Ilssamykarim2009Ainda não há avaliações
- Service Manual MIH Series Condensing Units Heat Pump: 1.5 Tons To 5 TonsDocumento30 páginasService Manual MIH Series Condensing Units Heat Pump: 1.5 Tons To 5 TonsHenry Javier RíosAinda não há avaliações
- Lesson 1 DataDocumento4 páginasLesson 1 Dataapi-435318918Ainda não há avaliações
- Arni AdvertisementDocumento2 páginasArni AdvertisementHemanthAinda não há avaliações
- Advanced Simulation Guidebook Volume II - The High Performance Building Process PDFDocumento33 páginasAdvanced Simulation Guidebook Volume II - The High Performance Building Process PDFomarAinda não há avaliações
- Fortinet Configuration Report: Hostname: "FG3600-Internet"Documento21 páginasFortinet Configuration Report: Hostname: "FG3600-Internet"rizkymulyawan89Ainda não há avaliações
- Vocational Training Report 3Documento37 páginasVocational Training Report 3Suraj sahuAinda não há avaliações
- 020 - MDCC For Sluice GatesDocumento1 página020 - MDCC For Sluice GatesYOGESH PHALKEAinda não há avaliações
- Riphah Project GuidelinesDocumento14 páginasRiphah Project GuidelinesTanveer AhmedAinda não há avaliações
- kp-57-65wv600 SONYDocumento33 páginaskp-57-65wv600 SONYdjcamdtvAinda não há avaliações
- Code PICDocumento6 páginasCode PICsongbao527Ainda não há avaliações
- Senses of Success and The Rise of The Blockbuster by Charles AclandDocumento9 páginasSenses of Success and The Rise of The Blockbuster by Charles AclandMittsouAinda não há avaliações