Você também pode gostar
- Devi Ever Diy Info Manual, Aw Heck YesDocumento20 páginasDevi Ever Diy Info Manual, Aw Heck YesRiley Smith75% (4)
- Fuse Box Diagram JeepDocumento7 páginasFuse Box Diagram JeepSumedin Nisic100% (1)
- A. Marakani - FEA and Design of A Plane TrussDocumento7 páginasA. Marakani - FEA and Design of A Plane TrussLe Thanh PhanAinda não há avaliações
- Open Collector Outputs - Signet Sensors PDFDocumento4 páginasOpen Collector Outputs - Signet Sensors PDFfrank_grimesAinda não há avaliações
- Memoria Flash SST25VF032BDocumento33 páginasMemoria Flash SST25VF032Bfrank_grimesAinda não há avaliações
- Competing Values Competency QuestionnaireDocumento14 páginasCompeting Values Competency QuestionnaireVahmi Brian Owen D'sullivansevenfoldimerz100% (2)
- 5400 Replace BBU BlockDocumento15 páginas5400 Replace BBU BlockAhmed HaggarAinda não há avaliações
- SentiBotics Trial DocumentationDocumento10 páginasSentiBotics Trial DocumentationTaufiq AriefiantoAinda não há avaliações
- Industrial Robot Laboratory StaeubliDocumento17 páginasIndustrial Robot Laboratory StaeubliJesus Said Mercado VegaAinda não há avaliações
- The MoveIt Motion Planning Framework Configuration For The IRI WAM RobotDocumento8 páginasThe MoveIt Motion Planning Framework Configuration For The IRI WAM RobotfabromoAinda não há avaliações
- Oracle Jrockit Mission Control Lab GuideDocumento17 páginasOracle Jrockit Mission Control Lab GuideashuhegdeAinda não há avaliações
- Flowcode Introductory Course PDFDocumento12 páginasFlowcode Introductory Course PDFmawunyoAinda não há avaliações
- PowerMILL Robot Interface - Training CourseDocumento32 páginasPowerMILL Robot Interface - Training CoursedaocongdablAinda não há avaliações
- Robix Familiarisation Guide: School of Information Technology and Engineering University of OttawaDocumento14 páginasRobix Familiarisation Guide: School of Information Technology and Engineering University of OttawaYen BaoAinda não há avaliações
- Abap How To DebugDocumento8 páginasAbap How To DebugYCART2Ainda não há avaliações
- READMEDocumento6 páginasREADMEjuliana perez ordoñezAinda não há avaliações
- rmbFaceTool v0.2.10 1Documento21 páginasrmbFaceTool v0.2.10 1Quang Cao Trang NhatAinda não há avaliações
- Artificial Life - Robotics TutorialsDocumento29 páginasArtificial Life - Robotics TutorialsronoroaAinda não há avaliações
- Unit 1 Applets: Structure Page NosDocumento20 páginasUnit 1 Applets: Structure Page NosxbabaxAinda não há avaliações
- Controlling The Robot From PC: Submitted by Dolinay On July 28, 2008 - 9:39pmDocumento7 páginasControlling The Robot From PC: Submitted by Dolinay On July 28, 2008 - 9:39pmBS RohitAinda não há avaliações
- Activity2 Simulation in RobotExpert Part OneDocumento12 páginasActivity2 Simulation in RobotExpert Part OneBryan CamargoAinda não há avaliações
- Formula Flowcode - An Introductory Course PDFDocumento12 páginasFormula Flowcode - An Introductory Course PDFJUANAinda não há avaliações
- Chapter 4 Progress and Result (Nasih)Documento9 páginasChapter 4 Progress and Result (Nasih)Nasih UlwanAinda não há avaliações
- Rapid ProgrammingDocumento18 páginasRapid ProgrammingCarlosAinda não há avaliações
- Basics of Applets: (A. RATNAKAR, 08NT1A0503)Documento9 páginasBasics of Applets: (A. RATNAKAR, 08NT1A0503)Jack RatanAinda não há avaliações
- Unit 3 Applets: Structure Page NosDocumento20 páginasUnit 3 Applets: Structure Page NosMala MishraAinda não há avaliações
- Apple TsDocumento17 páginasApple Tsnaresh madduAinda não há avaliações
- Simulation of Robotic ManipulatorsDocumento6 páginasSimulation of Robotic ManipulatorstaydomanAinda não há avaliações
- SAP Network Blog - New ABAP Debugger - Tips and TricksDocumento14 páginasSAP Network Blog - New ABAP Debugger - Tips and Tricksyk_abapAinda não há avaliações
- Event HandlingDocumento64 páginasEvent Handlinguddagiri sirishaAinda não há avaliações
- Laboratorio DroneDocumento7 páginasLaboratorio DroneFernando MontanhaAinda não há avaliações
- Sim DocDocumento7 páginasSim Docmanju439Ainda não há avaliações
- Introduction To Robotics Lab Manual: The Islamia University of Bahawalpur Department of Computer Systems EngineeringDocumento62 páginasIntroduction To Robotics Lab Manual: The Islamia University of Bahawalpur Department of Computer Systems EngineeringEngrFawwadHassanJaskani100% (1)
- Java Chapter 5Documento20 páginasJava Chapter 5Faizan DangeAinda não há avaliações
- Anthropomorphic Robotic Arms - Practice and SimulationDocumento5 páginasAnthropomorphic Robotic Arms - Practice and SimulationbugraerginAinda não há avaliações
- Robotic Arm Manipulation - MUGUNTHANDocumento7 páginasRobotic Arm Manipulation - MUGUNTHANMugun ThanAinda não há avaliações
- Seminar Paper On Java AppletsDocumento16 páginasSeminar Paper On Java AppletsOgbodo Emeka A100% (1)
- AppletDocumento48 páginasAppletDivya SinghAinda não há avaliações
- NI Tutorial 14133 enDocumento7 páginasNI Tutorial 14133 ensonti110% (1)
- Assignment 1Documento16 páginasAssignment 1Muhammad AhmadAinda não há avaliações
- « Introduction to Biomedical Engineering»: СourseDocumento7 páginas« Introduction to Biomedical Engineering»: СourseEbrahim Abd El HadyAinda não há avaliações
- Rover ConstructionDocumento19 páginasRover ConstructionNicolas Del BuonoAinda não há avaliações
- Module 06 Transfer 608Documento16 páginasModule 06 Transfer 608Lê Danh ThụAinda não há avaliações
- SAP ABAP Debugger TipsDocumento8 páginasSAP ABAP Debugger TipsVInvincibleAinda não há avaliações
- (AiboHack - Boneyard) SapBench - PDA Workbench For RoboSapien Control ScriptingDocumento5 páginas(AiboHack - Boneyard) SapBench - PDA Workbench For RoboSapien Control ScriptingRICHARDAinda não há avaliações
- Debugging TecDocumento22 páginasDebugging Teca.ramprasanthAinda não há avaliações
- Unit - VDocumento24 páginasUnit - VGangisetti SrihariAinda não há avaliações
- Applets: in A Web PageDocumento15 páginasApplets: in A Web Pageaamer_shahbaazAinda não há avaliações
- Applets in JavaDocumento13 páginasApplets in JavaHari KrishnanAinda não há avaliações
- Final Report of Digital Video Processing Face TrackingDocumento11 páginasFinal Report of Digital Video Processing Face TrackingHemanth KumarAinda não há avaliações
- ECP Lab1 Simulink Intro r4Documento6 páginasECP Lab1 Simulink Intro r4keyboard2014Ainda não há avaliações
- Java Programming: UNIT-5 Applets and Event Handling Topics Covered in This UnitDocumento40 páginasJava Programming: UNIT-5 Applets and Event Handling Topics Covered in This UnitSrinivas TAinda não há avaliações
- 17cs42 Mod5 PDFDocumento44 páginas17cs42 Mod5 PDFNikithaAinda não há avaliações
- Java AWTDocumento8 páginasJava AWTAnshu PriyaAinda não há avaliações
- What Is The Virtual Reality ToolboxDocumento2 páginasWhat Is The Virtual Reality ToolboxAashna PanjwaniAinda não há avaliações
- JAVADocumento127 páginasJAVApriya khabaraAinda não há avaliações
- Automation and RoboticsDocumento23 páginasAutomation and RoboticsvvipmembersAinda não há avaliações
- The Performance OverlayDocumento43 páginasThe Performance OverlayhallisomAinda não há avaliações
- Applet-HTML Programming2018Documento66 páginasApplet-HTML Programming2018pradnya sadigaleAinda não há avaliações
- Chap11 Applets FinalDocumento14 páginasChap11 Applets FinalRajan SahotaAinda não há avaliações
- Java Applets: The HTML Page Must Tells The BrowserDocumento16 páginasJava Applets: The HTML Page Must Tells The Browservedant kulkarniAinda não há avaliações
- Chapter-2 Java AppletDocumento26 páginasChapter-2 Java AppletNaoly GetAinda não há avaliações
- Simulation in LabVIEWDocumento14 páginasSimulation in LabVIEWjoukendAinda não há avaliações
- Assignment 1.1 HandoutDocumento6 páginasAssignment 1.1 HandoutJessica ForbesAinda não há avaliações
- Unit VDocumento51 páginasUnit Vuday franklinAinda não há avaliações
- Getting Started With Quick Test Professional (QTP) And Descriptive ProgrammingNo EverandGetting Started With Quick Test Professional (QTP) And Descriptive ProgrammingNota: 4.5 de 5 estrelas4.5/5 (2)
- How To Recalibrate A PICDocumento3 páginasHow To Recalibrate A PICfrank_grimesAinda não há avaliações
- PIC18F46J50 ErrataDocumento12 páginasPIC18F46J50 Erratafrank_grimesAinda não há avaliações
- Accurate TMR0 InterruptsDocumento6 páginasAccurate TMR0 Interruptsfrank_grimesAinda não há avaliações
- Pic 16 F 877 ADocumento688 páginasPic 16 F 877 ApvylaleAinda não há avaliações
- Passing A Port Pin As An Argument To A Function - MPLAB XC8Documento1 páginaPassing A Port Pin As An Argument To A Function - MPLAB XC8frank_grimesAinda não há avaliações
- PIC18F46J50Documento562 páginasPIC18F46J50frank_grimesAinda não há avaliações
- 2.830J / 6.780J / ESD.63J Control of Manufacturing Processes (SMA 6303)Documento3 páginas2.830J / 6.780J / ESD.63J Control of Manufacturing Processes (SMA 6303)frank_grimesAinda não há avaliações
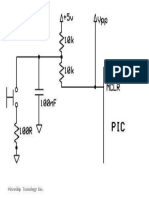
- MCLR Reset CircuitDocumento1 páginaMCLR Reset Circuitfrank_grimesAinda não há avaliações
- 01028BDocumento10 páginas01028Bjohn100% (1)
- HD44780Documento60 páginasHD44780nzltfAinda não há avaliações
- Receptor Infrarrojo Tsop382Documento7 páginasReceptor Infrarrojo Tsop382frank_grimesAinda não há avaliações
- PICDocumento46 páginasPICNguyen Minh TuAinda não há avaliações
- Stepping Motors FundamentalsDocumento22 páginasStepping Motors Fundamentalsvishnukarthick108Ainda não há avaliações
- Booksim 2.0 User'S GuideDocumento10 páginasBooksim 2.0 User'S GuideSourav SatpathyAinda não há avaliações
- Lecture 1 - Manufacturing Process and Process ControlDocumento8 páginasLecture 1 - Manufacturing Process and Process Controlfrank_grimesAinda não há avaliações
- Assignment 1Documento6 páginasAssignment 1frank_grimesAinda não há avaliações
- Exercise1 AssignmentDocumento5 páginasExercise1 Assignmentfrank_grimesAinda não há avaliações
- B BKZ Hyd Il 2 CDocumento12 páginasB BKZ Hyd Il 2 Cfrank_grimesAinda não há avaliações
- Lecture 2 PDFDocumento56 páginasLecture 2 PDFfrank_grimesAinda não há avaliações
- Unit 6: Equations of Lines and Planes: Solutions Block 1:vector ArithmeticDocumento27 páginasUnit 6: Equations of Lines and Planes: Solutions Block 1:vector Arithmeticfrank_grimesAinda não há avaliações
- DSDocumento18 páginasDSrojo_32100% (1)
- Constants FormulasDocumento1 páginaConstants FormulasMensajes De Texto GratisAinda não há avaliações
- Garnet TutorialDocumento42 páginasGarnet Tutorialfrank_grimesAinda não há avaliações
- MITRES 18 007 Parti Lec01 PDFDocumento15 páginasMITRES 18 007 Parti Lec01 PDFfrank_grimesAinda não há avaliações
- Structure: Study Guide Block 1:vector ArithmeticDocumento6 páginasStructure: Study Guide Block 1:vector Arithmeticfrank_grimesAinda não há avaliações
- MITOCW - MITRES - 18-007 - Part3 - Lec5 - 300k.mp4: ProfessorDocumento12 páginasMITOCW - MITRES - 18-007 - Part3 - Lec5 - 300k.mp4: Professorfrank_grimesAinda não há avaliações
- B BKZ Hyd Il 2 CDocumento12 páginasB BKZ Hyd Il 2 Cfrank_grimesAinda não há avaliações
- B BKZ Hyd Il 2 CDocumento12 páginasB BKZ Hyd Il 2 Cfrank_grimesAinda não há avaliações
- EPLAN Print Job PDFDocumento167 páginasEPLAN Print Job PDFrammu2001Ainda não há avaliações
- A4000 Installation ManualDocumento10 páginasA4000 Installation ManualMuti FutiAinda não há avaliações
- 85001-0636 - Portable Loudspeaker SystemDocumento2 páginas85001-0636 - Portable Loudspeaker SystemmohammadAinda não há avaliações
- sw70x1 Service ManualDocumento35 páginassw70x1 Service ManualGitmel GutierrezAinda não há avaliações
- Bittorrent-Like P2P NetworkDocumento41 páginasBittorrent-Like P2P NetworkNguyễn Ngọc GiàuAinda não há avaliações
- Final Report FEQ PDFDocumento69 páginasFinal Report FEQ PDFNabeel A K JadoonAinda não há avaliações
- International StrategyDocumento34 páginasInternational StrategymanicatewatiaAinda não há avaliações
- Seagoing Tug "Mhan Aung-3": Ministry of TransportDocumento2 páginasSeagoing Tug "Mhan Aung-3": Ministry of TransportnyaungzinAinda não há avaliações
- Full Circle Magazine Issue 19Documento34 páginasFull Circle Magazine Issue 19vwvr9Ainda não há avaliações
- Kstar Inverosores DatasheetDocumento1 páginaKstar Inverosores DatasheetJosueLopesFariasAinda não há avaliações
- Hyb 96 MhuaDocumento13 páginasHyb 96 Mhuaأبو زينب المهندسAinda não há avaliações
- Gravity Analog Dissolved Oxygen Sensor SKU SEN0237 DFRobot Electronic Product Wiki and Tutorial Arduino and Robot WikiDocumento8 páginasGravity Analog Dissolved Oxygen Sensor SKU SEN0237 DFRobot Electronic Product Wiki and Tutorial Arduino and Robot WikihipolitoAinda não há avaliações
- Resume: Gayathri.SDocumento2 páginasResume: Gayathri.SKeyar SrinivasanAinda não há avaliações
- TD 1 LadderDocumento3 páginasTD 1 Ladderbuzzmedia storeAinda não há avaliações
- Hotel Cleaning Equipment Used byDocumento9 páginasHotel Cleaning Equipment Used byLeonardo ViridisAinda não há avaliações
- IT Audit Exercise 2Documento1 páginaIT Audit Exercise 2wirdinaAinda não há avaliações
- How Bangalore Gets ElectricityDocumento1 páginaHow Bangalore Gets ElectricityNabeel AhmedAinda não há avaliações
- E03f PDFDocumento62 páginasE03f PDFYuniar SyahadhatinAinda não há avaliações
- Product Data: 58GP, GS Upflow Natural-Draft Gas-Fired FurnaceDocumento8 páginasProduct Data: 58GP, GS Upflow Natural-Draft Gas-Fired FurnaceMichael MartinAinda não há avaliações
- BedZED Toolkit Part 1Documento44 páginasBedZED Toolkit Part 1Razvan NenciuAinda não há avaliações
- 5065-Article Text-17890-1-10-20230110Documento18 páginas5065-Article Text-17890-1-10-20230110Januar KristianAinda não há avaliações
- EEPW3142 QP Version-ADocumento8 páginasEEPW3142 QP Version-A3nathAinda não há avaliações
- Huawei OLT MA5600T 10G GPON H801XGBD Board Hardware DescriptionDocumento6 páginasHuawei OLT MA5600T 10G GPON H801XGBD Board Hardware DescriptionHuawei GPON Networks100% (1)
- SCA0424R500 560 620SpecSheet SAU2016-8-R500 R560 R620 6x4 WEBDocumento4 páginasSCA0424R500 560 620SpecSheet SAU2016-8-R500 R560 R620 6x4 WEBChristopherAinda não há avaliações
- Snort ProjectDocumento12 páginasSnort Projectsubhendu0% (1)