Você também pode gostar
- Plan Mantenimiento IndustrialDocumento5 páginasPlan Mantenimiento IndustrialluisalidaAinda não há avaliações
- Selección de banda transportadora, motor y cojinetes para proyectoDocumento7 páginasSelección de banda transportadora, motor y cojinetes para proyectoSteven Navas TafurAinda não há avaliações
- Fundamentos del formado de metales y procesos de deformación volumétricaDocumento8 páginasFundamentos del formado de metales y procesos de deformación volumétricaRenzo PiccoliAinda não há avaliações
- SegundaPractica 2Documento19 páginasSegundaPractica 2Edwar CarlosAinda não há avaliações
- Funcionamiento de Una Máquina ExpendedoraDocumento2 páginasFuncionamiento de Una Máquina ExpendedoraFreddy Ramirez0% (1)
- PREGUNTAS DE REPASO CAP1 Procesos de FabricacionDocumento3 páginasPREGUNTAS DE REPASO CAP1 Procesos de FabricacionestuardoAinda não há avaliações
- Trabajo Normas Din AsaDocumento13 páginasTrabajo Normas Din AsafreddyAinda não há avaliações
- Capitulo 28Documento2 páginasCapitulo 28AlexAinda não há avaliações
- EnergéticaDocumento5 páginasEnergéticaThalia Ramirez LopezAinda não há avaliações
- Torneado de PeónDocumento3 páginasTorneado de PeónMartín Leonel Vizcarra GómezAinda não há avaliações
- Cuestionario Rectificado Sanchez Sarabia 3 IM68Documento2 páginasCuestionario Rectificado Sanchez Sarabia 3 IM68Fernando Sanchez SarabiaAinda não há avaliações
- Diferencias entre procesamiento de polvos metálicos y cerámicosDocumento6 páginasDiferencias entre procesamiento de polvos metálicos y cerámicosLeonardoArteagaAinda não há avaliações
- Proyecto Prensa Neumática Ensamble de PerillaDocumento30 páginasProyecto Prensa Neumática Ensamble de PerillaReinaldo Araúz AramayoAinda não há avaliações
- Esfuerzo Deformación de Ingeniería - Procesos de Manufactura I - RAFDocumento2 páginasEsfuerzo Deformación de Ingeniería - Procesos de Manufactura I - RAFEdisson Guzman0% (1)
- Trabajo PistonDocumento6 páginasTrabajo PistonDaisy AguilarAinda não há avaliações
- Codigos M PDFDocumento1 páginaCodigos M PDFPedroGarciaCazaresAinda não há avaliações
- Fresado: tipos, partes y fundamentosDocumento6 páginasFresado: tipos, partes y fundamentosCarlos Gonzalez ValarezoAinda não há avaliações
- Cepilladora de Codo - Parte9 PDFDocumento37 páginasCepilladora de Codo - Parte9 PDFAngel CruzAinda não há avaliações
- Procesos Avanzados de ManufacturaDocumento7 páginasProcesos Avanzados de ManufacturaCarlos MulaAinda não há avaliações
- Informe CNCDocumento7 páginasInforme CNCDiego F Villena100% (1)
- Registro Móvil de Usuario (RMUDocumento6 páginasRegistro Móvil de Usuario (RMUJesus Diaz de la Vega100% (1)
- Distribución Binomial y R (T) ConfiabilidadDocumento12 páginasDistribución Binomial y R (T) ConfiabilidadIvan Jose PerezAinda não há avaliações
- Metodología DFX para Fabricación en Serie de Nanodispositivos para Diagnosticar y Estudiar Enfermedades Genéticas.Documento4 páginasMetodología DFX para Fabricación en Serie de Nanodispositivos para Diagnosticar y Estudiar Enfermedades Genéticas.alexavier168254Ainda não há avaliações
- El Picaxe 1Documento38 páginasEl Picaxe 1José Toledo AngelesAinda não há avaliações
- El Factor Humano y Las Máquinas CDocumento4 páginasEl Factor Humano y Las Máquinas CLeliz Crispin100% (2)
- 10 Ejercicios IODocumento6 páginas10 Ejercicios IOCarlos ChamorroAinda não há avaliações
- Fabricacion de Troquelado de Una Chapa MetalicaDocumento13 páginasFabricacion de Troquelado de Una Chapa Metalicamaria auora morgan diazAinda não há avaliações
- Semana 3 Economía MecanizadoDocumento14 páginasSemana 3 Economía MecanizadoDecksAinda não há avaliações
- Resúmen Programación CNCDocumento8 páginasResúmen Programación CNCMAXMONTANIAinda não há avaliações
- Aplicaciones Moviles y Servicios Web Con LabVIEWDocumento30 páginasAplicaciones Moviles y Servicios Web Con LabVIEWEzequiel DiazAinda não há avaliações
- MTD 1019 Manufactura AvanzadaDocumento3 páginasMTD 1019 Manufactura AvanzadaFernando VicenteAinda não há avaliações
- Maquinado Quimico G12Documento9 páginasMaquinado Quimico G12Cold SunsetAinda não há avaliações
- Manual EXP5500Documento40 páginasManual EXP5500Graciela SobradoAinda não há avaliações
- Taller 1Documento7 páginasTaller 1Anderson Enriquez CastroAinda não há avaliações
- Materiales para ResortesDocumento12 páginasMateriales para ResortesSabrina CruzAinda não há avaliações
- Código G y M ISODocumento11 páginasCódigo G y M ISOkevin MontaluiaAinda não há avaliações
- Materiales para Herramientas de Corte Clasificación ISO de RecubrimientosDocumento14 páginasMateriales para Herramientas de Corte Clasificación ISO de Recubrimientoskevin MontaluiaAinda não há avaliações
- Manual de Diseño Catia V5 R14Documento135 páginasManual de Diseño Catia V5 R14Rob HerdezAinda não há avaliações
- RESULTADO DEL APRENDIZAJE UNIDAD - CARRETERO - RemovedDocumento12 páginasRESULTADO DEL APRENDIZAJE UNIDAD - CARRETERO - RemovedAxel CarreteroAinda não há avaliações
- Diferencias PicsDocumento4 páginasDiferencias PicsSharon LimaAinda não há avaliações
- IO2 Red Optimización Prop Falso VerdaderoDocumento3 páginasIO2 Red Optimización Prop Falso VerdaderoAndrea GonzálezAinda não há avaliações
- Datos de Sensores Lab VoltDocumento2 páginasDatos de Sensores Lab VoltAlejandro De Jesus Lezama100% (1)
- Diagrama de Flujo de Un EnsambleDocumento12 páginasDiagrama de Flujo de Un EnsambleManoLin SanAinda não há avaliações
- Asignacion 1Documento19 páginasAsignacion 1Laura Massiel Paulino RodriguezAinda não há avaliações
- Taladro de ColumnaDocumento15 páginasTaladro de ColumnaPedro A GurrolaAinda não há avaliações
- Practica 3 - Probador de Continuidad.Documento11 páginasPractica 3 - Probador de Continuidad.Angel VazquezAinda não há avaliações
- Parametros de CorteDocumento22 páginasParametros de CorteJoaquin VelasquezAinda não há avaliações
- Diseño ModularDocumento6 páginasDiseño ModularSELENEAinda não há avaliações
- Ordenanza Metropolitana #404Documento69 páginasOrdenanza Metropolitana #404Steven MolinaAinda não há avaliações
- Fresadora PractDocumento15 páginasFresadora PractFrancisco Jiménez AlejandroAinda não há avaliações
- Capitulo 25Documento3 páginasCapitulo 25luisAinda não há avaliações
- Códigos Generales y MisceláneosDocumento1 páginaCódigos Generales y MisceláneosGabriela Fernández100% (1)
- Controladores en Automatización IndustrialDocumento5 páginasControladores en Automatización IndustrialWILMER CRUZ DIAZAinda não há avaliações
- Problemas TorneadoDocumento3 páginasProblemas TorneadoMari Intillaque Gomez-PimpolloAinda não há avaliações
- Problemas Propuestos ManufacturaDocumento9 páginasProblemas Propuestos ManufacturayosselinAinda não há avaliações
- Actividad de Evaluación (DSM)Documento14 páginasActividad de Evaluación (DSM)David Alc CAinda não há avaliações
- Fresado Químico - HerreraDocumento21 páginasFresado Químico - HerreraErick YenqueAinda não há avaliações
- CNC industria automotrizDocumento7 páginasCNC industria automotrizAngel MendozaAinda não há avaliações
- Resumen Manufacura AsistidaDocumento12 páginasResumen Manufacura AsistidaAndres Junior GonzalezAinda não há avaliações
- Procesos manufactura UESPEDocumento12 páginasProcesos manufactura UESPEJONATHAN ALEXIS GUANOTASIG CHICAIZAAinda não há avaliações
- Ensayo SeminarioDocumento2 páginasEnsayo SeminarioHector HdzAinda não há avaliações
- Circuitos SnubberDocumento2 páginasCircuitos SnubberHector Hdz100% (1)
- PLCDocumento4 páginasPLCHector HdzAinda não há avaliações
- Pittman Angel David y Jose Emmanuel PDFDocumento3 páginasPittman Angel David y Jose Emmanuel PDFHector HdzAinda não há avaliações
- Problemas Groover, Capitulo 13Documento7 páginasProblemas Groover, Capitulo 13Hector Hdz83% (6)
- Problemas Groover, Capitulo 13Documento7 páginasProblemas Groover, Capitulo 13Hector Hdz50% (4)
- Guía Oficial IPN 2014 PDFDocumento274 páginasGuía Oficial IPN 2014 PDFHector HdzAinda não há avaliações
- Requerimientos de Utiles de EscritorioDocumento2 páginasRequerimientos de Utiles de EscritorioRuly Antony Tolentino LópezAinda não há avaliações
- Funcionamiento y tipos de relés electromagnéticosDocumento15 páginasFuncionamiento y tipos de relés electromagnéticoshegh97847Ainda não há avaliações
- Informe RoscadoDocumento5 páginasInforme Roscadowilber aguilarAinda não há avaliações
- Solicitud Cotizacion - SodimacDocumento4 páginasSolicitud Cotizacion - SodimacJose Valdivia RosalesAinda não há avaliações
- Permiso de trabajo para operaciones de mantenimientoDocumento4 páginasPermiso de trabajo para operaciones de mantenimientoCesar Javier Rivera MartellAinda não há avaliações
- Brochure EmpresarialDocumento8 páginasBrochure EmpresarialSharon MirandaAinda não há avaliações
- Sesión 07 Teodolito y AplicacionesDocumento39 páginasSesión 07 Teodolito y AplicacionesYu ApazaAinda não há avaliações
- Proyecto Base SoporteDocumento13 páginasProyecto Base SoporteCris ThrAinda não há avaliações
- Mantenimiento de hardware PCDocumento4 páginasMantenimiento de hardware PCAlejo BriceñoAinda não há avaliações
- Aire Comprimido P-775Documento5 páginasAire Comprimido P-775Alpie70Ainda não há avaliações
- Manual TM7050 EI00Documento2 páginasManual TM7050 EI00javier pabloAinda não há avaliações
- Dibujos Técnicos y ArtisticosDocumento7 páginasDibujos Técnicos y ArtisticosPeter CacheAinda não há avaliações
- Reparación caja transmisión vehículoDocumento10 páginasReparación caja transmisión vehículoJulio CesarAinda não há avaliações
- Envases Universales: Impianto PetDocumento50 páginasEnvases Universales: Impianto PetRaúl GarciaAinda não há avaliações
- 1) Encendido Punto de Luz Simple: RS Rem OffDocumento8 páginas1) Encendido Punto de Luz Simple: RS Rem OffAlejandro OrtizAinda não há avaliações
- Inyector de SeñalesDocumento3 páginasInyector de Señalesiyoumls100% (1)
- Welcome To It Essentials Virtual DesktopDocumento7 páginasWelcome To It Essentials Virtual Desktopdanyelly gomezAinda não há avaliações
- Tendido de Linea PrincipalDocumento10 páginasTendido de Linea PrincipalArmando RivasAinda não há avaliações
- Tipos de Roscas.Documento10 páginasTipos de Roscas.larry yimeAinda não há avaliações
- 27-06-2017 Lista Productos Inv. Global ServicesDocumento21 páginas27-06-2017 Lista Productos Inv. Global Servicesmax franco flores roqueAinda não há avaliações
- Passion PRO (Jan, 2014)Documento30 páginasPassion PRO (Jan, 2014)Diego MartinezAinda não há avaliações
- Bomba Yaku Manual0de0instalacionDocumento16 páginasBomba Yaku Manual0de0instalacionRomario FilahiAinda não há avaliações
- Montaje de estructura metálica en ascensorDocumento13 páginasMontaje de estructura metálica en ascensorRichard Cornelio100% (1)
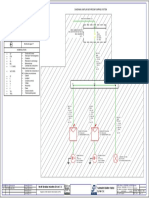
- DIAGRAMA UNIFILAR Bombas - Propuesta 1 (Subestacion)Documento1 páginaDIAGRAMA UNIFILAR Bombas - Propuesta 1 (Subestacion)Alan David Rojo HernandezAinda não há avaliações
- Las Caracterisitcas de Una Empalmadora PDFDocumento8 páginasLas Caracterisitcas de Una Empalmadora PDFJuan PerezAinda não há avaliações
- Cronograma de InversionDocumento14 páginasCronograma de InversionPedro Aguilar RivasAinda não há avaliações
- USLR XLT Manual - 7 26 13 SPANISH1 PDFDocumento4 páginasUSLR XLT Manual - 7 26 13 SPANISH1 PDFhenryAinda não há avaliações
- Bobinados TrifasicosDocumento23 páginasBobinados TrifasicosmiltonAinda não há avaliações
- Mira diurna Schmidt & Bender 3-12x50mm PM II (Mil-Dot PoliceDocumento13 páginasMira diurna Schmidt & Bender 3-12x50mm PM II (Mil-Dot PoliceMATA SONAinda não há avaliações
- Tarifas Maquinaria Equipos 22Documento6 páginasTarifas Maquinaria Equipos 22Roci YambayAinda não há avaliações
- Influencia. La psicología de la persuasiónNo EverandInfluencia. La psicología de la persuasiónNota: 4.5 de 5 estrelas4.5/5 (14)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másNo EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másNota: 2.5 de 5 estrelas2.5/5 (3)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasNo EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasNota: 4.5 de 5 estrelas4.5/5 (14)
- ChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...No EverandChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Nota: 5 de 5 estrelas5/5 (4)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaNo EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaNota: 4.5 de 5 estrelas4.5/5 (116)
- Estructuras de Datos Básicas: Programación orientada a objetos con JavaNo EverandEstructuras de Datos Básicas: Programación orientada a objetos con JavaNota: 5 de 5 estrelas5/5 (1)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroNo EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroNota: 4 de 5 estrelas4/5 (1)
- Auditoría de seguridad informática: Curso prácticoNo EverandAuditoría de seguridad informática: Curso prácticoNota: 5 de 5 estrelas5/5 (1)
- Cómo Seducir Mujeres con tu Celular: Envía poderosos mensajes de texto que cautivarán a las mujeres que siempre has deseado tener en tu vidaNo EverandCómo Seducir Mujeres con tu Celular: Envía poderosos mensajes de texto que cautivarán a las mujeres que siempre has deseado tener en tu vidaNota: 4 de 5 estrelas4/5 (9)
- Lean: La Guía Fundamental para Lean Startup, Lean Six Sigma, Lean Analytics, Lean Enterprise, Lean Manufacturing, Scrum, Gestión Agile de Proyectos y KanbanNo EverandLean: La Guía Fundamental para Lean Startup, Lean Six Sigma, Lean Analytics, Lean Enterprise, Lean Manufacturing, Scrum, Gestión Agile de Proyectos y KanbanNota: 5 de 5 estrelas5/5 (1)
- Reparar (casi) cualquier cosa: Cómo ajustar los objetos de uso cotidiano con la electrónica y la impresora 3DNo EverandReparar (casi) cualquier cosa: Cómo ajustar los objetos de uso cotidiano con la electrónica y la impresora 3DNota: 5 de 5 estrelas5/5 (6)
- La biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetNo EverandLa biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetNota: 5 de 5 estrelas5/5 (7)
- Lean Seis Sigma: La guía definitiva sobre Lean Seis Sigma, Lean Enterprise y Lean Manufacturing, con herramientas para incrementar la eficiencia y la satisfacción del clienteNo EverandLean Seis Sigma: La guía definitiva sobre Lean Seis Sigma, Lean Enterprise y Lean Manufacturing, con herramientas para incrementar la eficiencia y la satisfacción del clienteNota: 4.5 de 5 estrelas4.5/5 (5)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.No EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Nota: 4 de 5 estrelas4/5 (51)
- El trading online de una forma sencilla: Cómo convertirse en un inversionista online y descubrir las bases para lograr un trading de éxitoNo EverandEl trading online de una forma sencilla: Cómo convertirse en un inversionista online y descubrir las bases para lograr un trading de éxitoNota: 4 de 5 estrelas4/5 (30)
- AngularJS: Conviértete en el profesional que las compañías de software necesitan.No EverandAngularJS: Conviértete en el profesional que las compañías de software necesitan.Nota: 3.5 de 5 estrelas3.5/5 (3)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.No EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Nota: 4.5 de 5 estrelas4.5/5 (54)
- Energía solar autónoma: Una guía práctica para entender e instalar sistemas fotovoltaicos y de bateríasNo EverandEnergía solar autónoma: Una guía práctica para entender e instalar sistemas fotovoltaicos y de bateríasAinda não há avaliações