Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Mme20110200004 76841505Documento9 páginasMme20110200004 76841505Giovani CardonaAinda não há avaliações
- Mme20110200004 76841505Documento9 páginasMme20110200004 76841505Giovani CardonaAinda não há avaliações
- Arm 7 Based Robotic Arm Control by Electronic Gesture Recognition Unit Using MemsDocumento4 páginasArm 7 Based Robotic Arm Control by Electronic Gesture Recognition Unit Using MemsseventhsensegroupAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- CSE Night Vision Technology ReportDocumento19 páginasCSE Night Vision Technology ReportGopiAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- MIT Radiaton Lab Series, V6, Microwave Magnetrons - Front Matter, Preface, ContentsDocumento18 páginasMIT Radiaton Lab Series, V6, Microwave Magnetrons - Front Matter, Preface, ContentsKevin HaworthAinda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- TCSC 501 MS EeDocumento27 páginasTCSC 501 MS EeNouman Alam SiddiquiAinda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- SimlabDocumento32 páginasSimlabAkbar AliAinda não há avaliações
- Iec Standard: IEC 61089 - OVERHEAD CONDUCTOR-e.pdf IEC61089-amd1 PDFDocumento2 páginasIec Standard: IEC 61089 - OVERHEAD CONDUCTOR-e.pdf IEC61089-amd1 PDFHosam AlzubairyAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Questions For Structure of Atom - CBSE Chemistry Class 11Documento4 páginasQuestions For Structure of Atom - CBSE Chemistry Class 11The DealerAinda não há avaliações
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Low Frequency QsDocumento6 páginasLow Frequency QsRon FranklinAinda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Datasheet ASW 8-20K LT-G2 Series en WebDocumento2 páginasDatasheet ASW 8-20K LT-G2 Series en WebRadu Paul SorinAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- FWM592 MP3 Mini Hi-Fi SystemDocumento31 páginasFWM592 MP3 Mini Hi-Fi SystemHector AraujoAinda não há avaliações
- Dsi 700Documento30 páginasDsi 700mahh1234Ainda não há avaliações
- Electric Machines EEE241 LAB Report#3: Name Registration Number Teacher Date of SubmissionDocumento7 páginasElectric Machines EEE241 LAB Report#3: Name Registration Number Teacher Date of Submissionbilal ahmedAinda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Sag and Tension CalculationDocumento15 páginasSag and Tension CalculationRatana Kem0% (1)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Deadbreak Apparatus Connectors: 600 A T-Op Ii Terminator Operation InstructionsDocumento8 páginasDeadbreak Apparatus Connectors: 600 A T-Op Ii Terminator Operation InstructionsNguyen Anh TuAinda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Physics Formula Sheet by VishalDocumento2 páginasPhysics Formula Sheet by Vishalabhinav yadavAinda não há avaliações
- Jackson 1.6 Homework Problem SolutionDocumento4 páginasJackson 1.6 Homework Problem SolutionSukhmander SinghAinda não há avaliações
- Tasc 2006 870526Documento4 páginasTasc 2006 870526Agustinus BAinda não há avaliações
- R1283K001CDocumento26 páginasR1283K001CdinhdtdAinda não há avaliações
- Exercises Chapter29Documento8 páginasExercises Chapter29Чего Хочешь?Ainda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- BLDCDocumento53 páginasBLDCstarboyAinda não há avaliações
- All McqsDocumento34 páginasAll McqsWaris ShahAinda não há avaliações
- ASEAN Electricity Tariffs - 2011Documento3 páginasASEAN Electricity Tariffs - 2011sumit_malik80Ainda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Sony KDL-22EX550 AZ3F PDFDocumento112 páginasSony KDL-22EX550 AZ3F PDFLucas Quaio BelanzuoliAinda não há avaliações
- Oa172ec Ip68 Atex-1488245Documento2 páginasOa172ec Ip68 Atex-1488245Raul FelicianoAinda não há avaliações
- Experiment No 2Documento7 páginasExperiment No 2Krishnaa SharmaAinda não há avaliações
- PWM Signal GenerationDocumento4 páginasPWM Signal GenerationPravat SatpathyAinda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (120)
- Eac 805Documento1 páginaEac 805Charles TineoAinda não há avaliações
- Measure DC Voltage SubtitlesDocumento2 páginasMeasure DC Voltage Subtitlesguasko9035Ainda não há avaliações
- ACCE 1 M - L01 IntroductionDocumento31 páginasACCE 1 M - L01 IntroductionMike SantosAinda não há avaliações
- Chap: 12 (Electromagnetic Induction) : by Ajay Dubey SirDocumento22 páginasChap: 12 (Electromagnetic Induction) : by Ajay Dubey SirMoksh MaruAinda não há avaliações
- Worksheet 12Documento3 páginasWorksheet 12Vijay BhaskarAinda não há avaliações
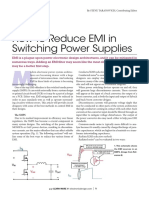
- How To Reduce EMI in Switching Power SuppliesDocumento3 páginasHow To Reduce EMI in Switching Power SuppliesHavandinhAinda não há avaliações